






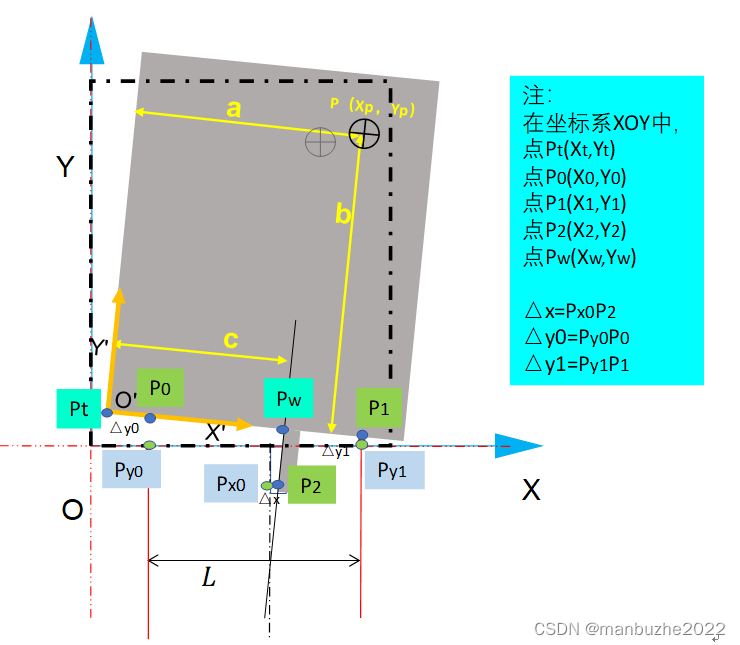
在坐标系XOY中,已知△y1、△y2、△x、X0、Y0、Y1、L等等参数,可以得到坐标P0{(X0,Y0)},P1{(X1,Y1)},P2{(X2,Y2)},
根据向量P0P1//P0PW,向量P0P1⊥P2Pw,可以计算得到点PW{(Xw,Yw)},进而可得到点Pt{(Xt,Yt)}和点P{(Xp,Yp)}.
解析:
向量P0P1: (X1-X0, Y1-Y0)
向量P0Pw: (Xw-X0, Yw-Y0)
向量P2Pw: (Xw-X2, Yw-Y2)
易得方程:
(Xw-X0)(Y1-Y0)- (Yw-Y0)(X1-X0)=0 ①
(Xw-X2)(X1-X0)+ (Yw-Y2)(Y1-Y0)=0 ②
解方程得:
Xw=(E1+F1)/((X1-X0)^2+(Y1-Y0)^2)
Yw=(F2-E2)/((X1-X0)^2+(Y1-Y0)^2)
其中:
E1=E0(Y1-Y0)
F1=F0(X1-X0)
E2=E0(X1-X0)
F2=F0(Y1-Y0)
E0=X0(Y1-Y0)-Y0(X1-X0)
F0=X2(X1-X0)+Y2(Y1-Y0)
记,旋转角度:θ=-arctan((△y0-△y1)/L),顺时针旋转为负,逆时针旋转为正。
则:
1)当逆时针旋转,θ>=0时,
Xt=Xw-C*Cosθ
Yt=Yw-C*Sinθ
2)当顺时针旋转,θ<0时,
Xt=Xw-C*Cosθ
Yt=Yw-C*Sinθ
得平移矩阵:
T=[Xt,Yt]’
旋转矩阵:
R=[ Cosθ, -Sinθ
Sinθ, Cosθ] 其中:顺时针旋转θ为负,逆时针旋转θ为正
则最终点P的坐标:
[Xp,YP]’=R*[a,b]’+T
或
[Xp,YP]’=R*[A,B]’+T – R*T, 其中:A=a+Xt,B=b+Yt















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









