







 该博客分享了一种基于Amorphous、APIT、RSSI等算法的无线传感器定位MATLAB仿真代码,重点介绍了如何通过未知节点利用已定位锚节点进行定位,并探讨了不同策略。通过三边测量法实现未知节点定位,并展示了仿真结果。
该博客分享了一种基于Amorphous、APIT、RSSI等算法的无线传感器定位MATLAB仿真代码,重点介绍了如何通过未知节点利用已定位锚节点进行定位,并探讨了不同策略。通过三边测量法实现未知节点定位,并展示了仿真结果。
1 简介
基于Amorphous、APIT、Bounding Box、Centroid、DV-hop、Grid Scan、MDS-MAP、RSSI多种算法实现无线传感器定位matlab仿真代码.
实现算法可能的方法:
1. 未知节点利用邻居锚节点进行定位,没有邻居锚节点的未知节点无法定位。
2. 未知节点一旦被定位,就充当锚节点。这时没有邻居锚节点的未知节点在等到自己的邻居未知节点定位之后就可以进行定位。
3. 有邻居锚节点的未知节点只利用邻居锚节点进行定位,没有邻居锚节点的未知节点才利用已经定位了的邻居未知节点进行定位。
2 部分代码
function RSSI_second()% 未知节点一旦被定位就充当起锚节点的功能,向周围邻居发送自己的估计坐标信息% 未知节点把已经定位的未知节点与锚节点同等对待% 根据接收信号强度转化为距离。规则传播模型下得到的距离跟实际距离没有误差% 不规则通信模型下,规则传播模型下得到的距离跟实际距离存在误差%~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~load '../Deploy Nodes/coordinates.mat';load '../Topology Of WSN/neighbor.mat';directory=cd;cd '../Topology Of WSN/Transmission Model/';cd(model);unknown_node_index=all_nodes.anchors_n+1:all_nodes.nodes_n;while truefor i=unknown_node_indexneighboring_anchor_index=intersect(find(neighbor_matrix(i,:)==1),find(all_nodes.anc_flag~=0));%已经定位的未知节点也视为锚节点neighboring_anchor_n=length(neighboring_anchor_index);if neighboring_anchor_n>=3trydist=rss2dist(neighbor_rss(neighboring_anchor_index,i),1);catchdist=rss2dist(neighbor_rss(neighboring_anchor_index,i));endneighboring_anchor_location=all_nodes.estimated(neighboring_anchor_index,:);%~~~~~~~~~~~~~~~~~~~~~~~~~三边测量法(最小二乘法)A=2*(neighboring_anchor_location(1:neighboring_anchor_n-1,:)-repmat(neighboring_anchor_location(neighboring_anchor_n,:),neighboring_anchor_n-1,1));neighboring_anchor_location_square=transpose(sum(transpose(neighboring_anchor_location.^2)));dist_square=dist.^2;b=neighboring_anchor_location_square(1:neighboring_anchor_n-1)-neighboring_anchor_location_square(neighboring_anchor_n)-dist_square(1:neighboring_anchor_n-1)+dist_square(neighboring_anchor_n);all_nodes.estimated(i,:)=transpose(A\b);all_nodes.anc_flag(i)=2;endendtryunknown_node_index==transpose(find(all_nodes.anc_flag==0));break;catchunknown_node_index=transpose(find(all_nodes.anc_flag==0));endend%~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~cd(directory);save '../Localization Error/result.mat' all_nodes comm_r;end
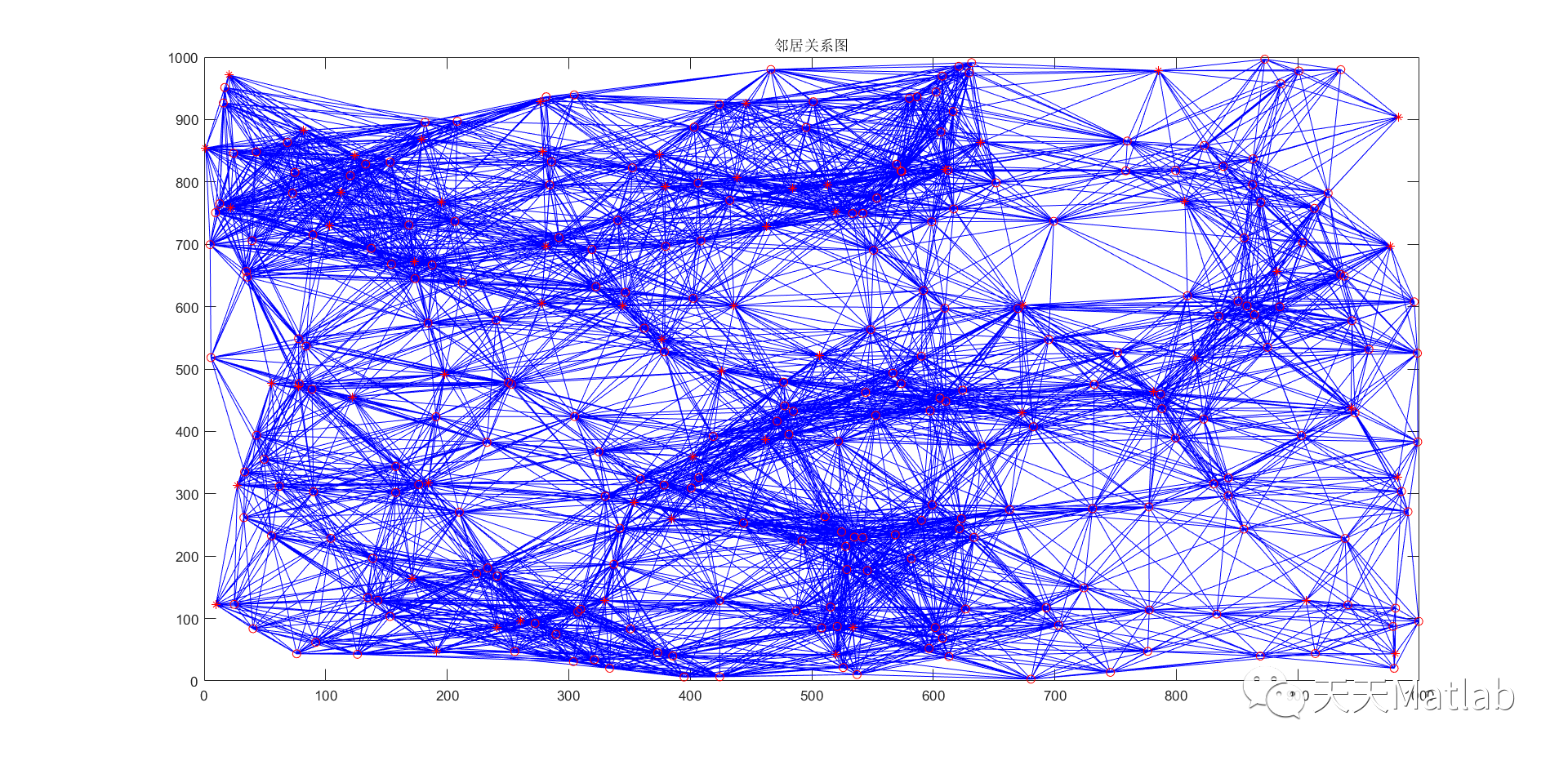
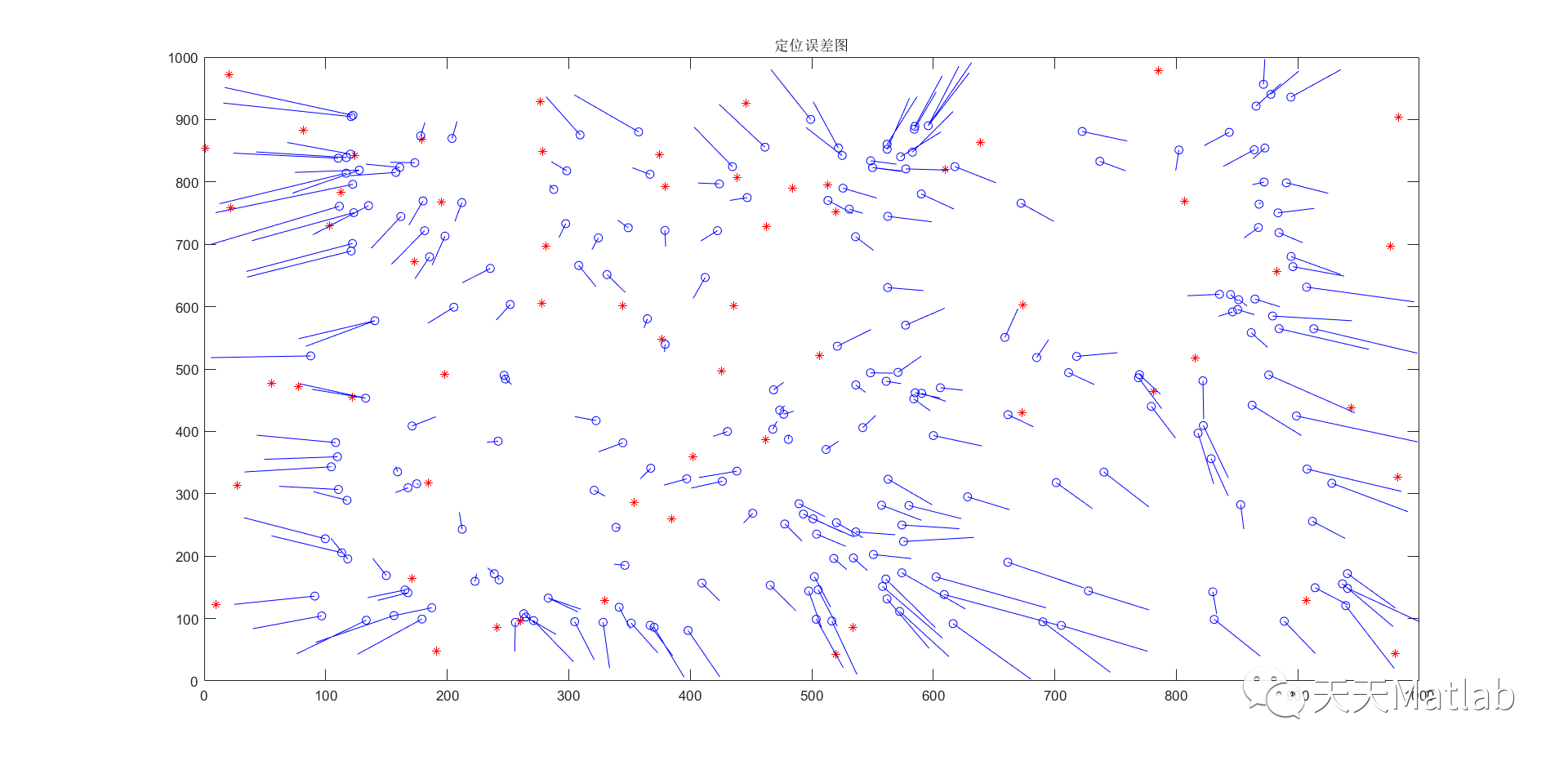
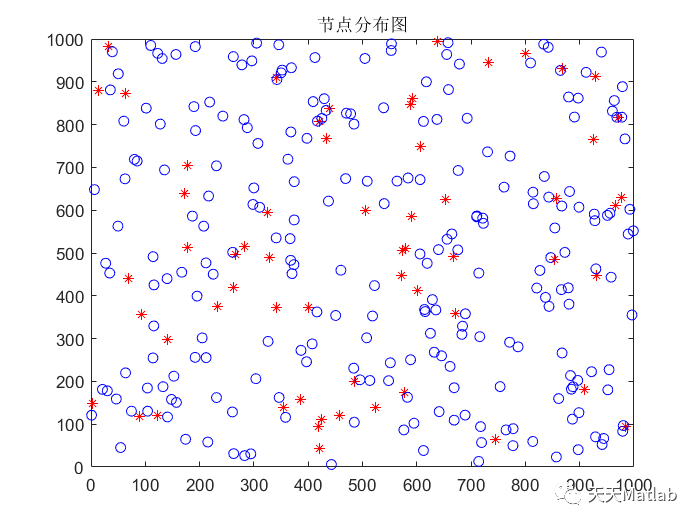
3 仿真结果
4 参考文献
[1]刘颖. 一种无线传感器的Amorphous定位算法改进[J]. 制造业自动化, 2011(1):3.
[2]张珂. 无线传感器网络DV-Hop定位算法研究与改进[D]. 江西师范大学.
博主简介:擅长智能优化算法、神经网络预测、信号处理、元胞自动机、图像处理、路径规划、无人机等多种领域的Matlab仿真,相关matlab代码问题可私信交流。
部分理论引用网络文献,若有侵权联系博主删除。


















 267
267

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











