







✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,matlab项目合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab仿真内容点击👇
⛄ 内容介绍
Middlebury 光流基准测试的结果证明,光流估计算法的准确性一直在稳步提高。然而,自从 Horn 和 Schunck 的工作以来,典型的表述几乎没有改变。我们试图通过对目标函数、优化方法和现代实施实践如何影响准确性的全面分析来揭示使最近取得的进展成为可能的原因。我们发现,当与现代优化和实施技术相结合时,“经典”流动公式的表现出奇地好。此外,我们发现,虽然优化期间中间流场的中值滤波是近期性能提升的关键,但它会带来更高能量的解决方案。要了解这种现象背后的原理,我们推导出一个新的目标,将中值过滤启发式形式化。
⛄ 部分代码
function uvo = estimate_flow_demo(method, iSeq, seqName, varargin)
%ESTIMATE_FLOW_DEMO Optical flow estimation demo program
%
% output UV is an M*N*2 matrix. UV(:,:,1) is the horizontal flow and
% UV(:,:,2) is the vertical flow.
%
% Example
% -------
% uv = estimate_flow_demo; or estimate_flow_demo;
% reads the color RubberWhale sequence and uses default parameters and
% default method "Classic+NL-Fast"
%
% same as
% uv = estimate_flow_demo('classic+nl-fast');
%
% uv = estimate_flow_demo('classic+nl-fast', 4, 'middle-other');
%
% uv = estimate_flow_demo('classic+nl-fast', 4, 'middle-other', 'lambda', 3, 'pyramid_levels', 5);
% takes user-defined parameters
%
% Method can be
% 'classic+nl-fast' (default) 'classic+nl' 'classic+nl-full'
% 'classic++' 'classic-c' 'classic-l'/'ba' 'hs'
%
% iSeq can ben 1 to 12: selects the sequence in the following cell arrays to process
% % training data
% SeqName = 'middle-other'
% {'Venus', 'Dimetrodon', 'Hydrangea', 'RubberWhale',...
% 'Grove2', 'Grove3', 'Urban2', 'Urban3', ...
% 'Walking', 'Beanbags', 'DogDance', 'MiniCooper'};
% % test data
% SeqName = 'middle-eval'
% {'Army', 'Mequon', 'Schefflera', 'Wooden', 'Grove', 'Urban', ...
% 'Yosemite', 'Teddy', 'Basketball', 'Evergreen', 'Backyard', 'Dumptruck'};
%
% 'lambda' trade-off (regularization) parameter; larger produces smoother flow fields
% 'sigma_d' parameter of the robust penalty function for the spatial term
% 'sigma_s' parameter of the robust penalty function for the data term
% 'pyramid_levels' pyramid levels for the quadratic formulation; default is automatic
% 'pyramid_spacing' downsampling ratio up each pyramid level for the quadratic formulation; default is 2
% 'gnc_pyramid_levels' pyramid levels for the non-quadratic formulation; default is 2
% 'gnc_pyramid_spacing' downsampling ratio up each pyramid level for the non-quadratic formulation; default is 1.25
%
%
% References:
% -----------
% Sun, D.; Roth, S. & Black, M. J. "Secrets of Optical Flow Estimation and
% Their Principles" IEEE Int. Conf. on Comp. Vision & Pattern Recognition, 2010
%
% Sun, D.; Roth, S. & Black, M. J. "A Quantitative Analysis of Current
% Practices in Optical Flow Estimation and The Principles Behind Them"
% Technical Report Brown-CS-10-03, 2010
%
% Authors: Deqing Sun, Department of Computer Science, Brown University
% Contact: dqsun@cs.brown.edu
% $Date: $
% $Revision: $
%
% Copyright 2007-2010, Brown University, Providence, RI. USA
%
% All Rights Reserved
%
% All commercial use of this software, whether direct or indirect, is
% strictly prohibited including, without limitation, incorporation into in
% a commercial product, use in a commercial service, or production of other
% artifacts for commercial purposes.
%
% Permission to use, copy, modify, and distribute this software and its
% documentation for research purposes is hereby granted without fee,
% provided that the above copyright notice appears in all copies and that
% both that copyright notice and this permission notice appear in
% supporting documentation, and that the name of the author and Brown
% University not be used in advertising or publicity pertaining to
% distribution of the software without specific, written prior permission.
%
% For commercial uses contact the Technology Venture Office of Brown University
%
% THE AUTHOR AND BROWN UNIVERSITY DISCLAIM ALL WARRANTIES WITH REGARD TO
% THIS SOFTWARE, INCLUDING ALL IMPLIED WARRANTIES OF MERCHANTABILITY AND
% FITNESS FOR ANY PARTICULAR PURPOSE. IN NO EVENT SHALL THE AUTHOR OR
% BROWN UNIVERSITY BE LIABLE FOR ANY SPECIAL, INDIRECT OR CONSEQUENTIAL
% DAMAGES OR ANY DAMAGES WHATSOEVER RESULTING FROM LOSS OF USE, DATA OR
% PROFITS, WHETHER IN AN ACTION OF CONTRACT, NEGLIGENCE OR OTHER TORTIOUS
% ACTION, ARISING OUT OF OR IN CONNECTION WITH THE USE OR PERFORMANCE OF
% THIS SOFTWARE.
if (~isdeployed)
addpath(genpath('utils'));
end
if nargin < 1
method = 'classic+nl-fast';
iSeq = 4;
seqName = 'middle-other';
%seqName = 'middle-eval';
elseif nargin == 1
iSeq = 4;
seqName = 'middle-other';
end;
[im1, im2, tu, tv] = read_flow_file(seqName, iSeq);
uv = estimate_flow_interface(im1, im2, method, varargin);
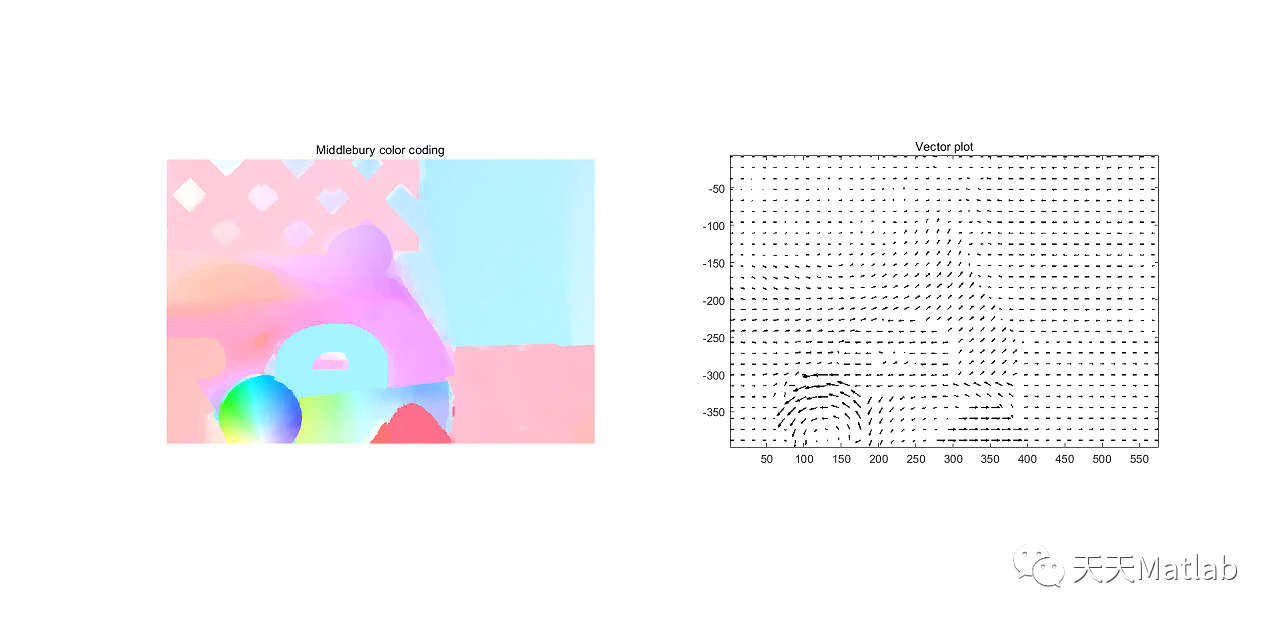
% Display estimated flow fields
figure; subplot(1,2,1);imshow(uint8(flowToColor(uv))); title('Middlebury color coding');
subplot(1,2,2); plotflow(uv); title('Vector plot');
if sum(~isnan(tu(:))) > 1
[aae stdae aepe] = flowAngErr(tu, tv, uv(:,:,1), uv(:,:,2), 0); % ignore 0 boundary pixels
fprintf('\nAAE %3.3f average EPE %3.3f \n', aae, aepe);
end;
% Uncomment below and change FN to save the flow fields
% if ~exist(['result/' seqName], 'file');
% mkdir(['result/' seqName]);
% end;
% fn = sprintf('result/%s/estimated_flow_%03d.flo', seqName, iSeq);
% writeFlowFile(uv, fn);
% Uncomment below to read the save flow field
% uv = readFlowFile(fn);
if nargout == 1
uvo = uv;
end;
% Uncomment below to remove 'utils/' to your
% matlab search path
% rmpath(genpath('utils'));
⛄ 运行结果
⛄ 参考文献
[1] Sun D , Roth S , Black M J . Secrets of Optical Flow Estimation and Their Principles[C]// The Twenty-Third IEEE Conference on Computer Vision and Pattern Recognition, CVPR 2010, San Francisco, CA, USA, 13-18 June 2010. IEEE, 2010.
❤️ 关注我领取海量matlab电子书和数学建模资料
❤️部分理论引用网络文献,若有侵权联系博主删除


















 542
542

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











