






✅作者简介:热爱科研的Matlab仿真开发者,擅长数据处理、建模仿真、程序设计、完整代码获取、论文复现及科研仿真。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
🔥 内容介绍
Bouc-Wen模型,作为一种广泛应用的滞回模型,在结构工程、振动控制、材料力学等领域发挥着关键作用。该模型能够有效地描述材料或结构的非线性滞回特性,进而提高复杂系统建模的精度和预测能力。然而,Bouc-Wen模型的参数辨识,即确定模型中各项参数的数值,是一个具有挑战性的问题,其直接影响着模型的有效性和可靠性。本文将围绕基于Bouc-Wen模型的参数辨识问题展开讨论,深入探讨常用的辨识方法、应用领域,并分析目前面临的挑战与未来的发展趋势。
Bouc-Wen模型概述
Bouc-Wen模型最初由Bouc提出,后经Wen改进,被广泛用于描述各种滞回现象。该模型以其简洁的形式和强大的表达能力而著称,能够模拟多种材料和结构的滞回行为,包括金属材料的塑性变形、摩擦阻尼、磁滞现象等。模型的核心在于引入一个内部变量Z,该变量的演化方程描述了滞回效应的动态特性,从而使得模型能够捕捉非线性滞回系统的复杂行为。Bouc-Wen模型的一般形式可以表示为:
F = αkX + (1 - α)kZ
dZ/dt = A dX/dt - β |dX/dt| |Z|^(n-1) Z - γ dX/dt |Z|^n
其中:
-
F代表恢复力或滞回力; -
X代表位移或应变; -
k代表初始刚度; -
α代表滞回环与线性部分的比例; -
Z代表滞回变量; -
A,β,γ,n是控制滞回环形状的参数。
这些参数对滞回环的特性产生显著影响。k 决定了初始刚度,α 控制了滞回环的倾斜程度,而 A, β, γ, n 则共同决定了滞回环的形状、面积以及滞回环逐渐达到饱和的程度。因此,准确辨识这些参数对于模型的有效应用至关重要。
常用的参数辨识方法
Bouc-Wen模型的参数辨识是一个非线性优化问题,通常需要借助数值方法求解。目前常用的参数辨识方法主要包括以下几类:
-
最小二乘法 (Least Squares Method, LSM): 这是最基本的参数辨识方法之一。其基本思想是最小化模型预测输出与实际观测值之间的误差平方和。对于Bouc-Wen模型,可以将模型输出的恢复力或滞回力作为预测值,将实验数据作为观测值,通过调整模型参数,使得预测值与观测值之间的误差平方和最小。然而,由于Bouc-Wen模型的非线性特性,直接使用线性最小二乘法往往难以获得理想的结果。通常需要结合非线性优化算法,如梯度下降法、牛顿法等,进行求解。
-
遗传算法 (Genetic Algorithm, GA): 遗传算法是一种基于生物进化原理的优化算法。它通过模拟自然选择、交叉和变异等过程,在参数空间中搜索最优解。对于Bouc-Wen模型的参数辨识,可以将模型的各个参数编码成染色体,通过适应度函数(通常是误差的平方和)评估染色体的优劣,然后进行选择、交叉和变异操作,最终得到最优的参数组合。遗传算法具有全局搜索能力,能够有效避免陷入局部最优解,但计算量较大,收敛速度较慢。
-
粒子群优化算法 (Particle Swarm Optimization, PSO): 粒子群优化算法是一种基于群体智能的优化算法。它模拟鸟群觅食的行为,将每个参数组合视为一个粒子,通过粒子之间的信息共享和自身经验积累,在参数空间中搜索最优解。与遗传算法相比,粒子群优化算法具有更快的收敛速度和更少的计算量。然而,粒子群优化算法也容易陷入局部最优解,需要进行适当的改进,如引入变异算子、调整参数等。
-
卡尔曼滤波 (Kalman Filter): 卡尔曼滤波是一种递推的估计方法,适用于在线参数辨识。它通过将模型状态和参数视为一个增广状态向量,然后利用观测数据进行状态估计和参数更新。卡尔曼滤波能够有效地处理噪声干扰,并实时更新参数,适用于时变系统的参数辨识。然而,卡尔曼滤波的计算量较大,需要较高的计算资源。扩展卡尔曼滤波 (Extended Kalman Filter, EKF) 是一种非线性版本的卡尔曼滤波,适用于非线性系统的参数辨识。
-
神经网络 (Neural Networks, NN): 神经网络具有强大的非线性映射能力,能够用于Bouc-Wen模型的参数辨识。可以将神经网络训练成一个参数辨识器,输入实验数据,输出Bouc-Wen模型的参数估计值。神经网络的优点在于能够处理复杂的数据关系,并具有较强的鲁棒性。然而,神经网络的训练需要大量的实验数据,并且容易出现过拟合现象。
Bouc-Wen模型的应用领域
Bouc-Wen模型凭借其独特的优势,被广泛应用于以下领域:
-
结构工程: 在结构工程中,Bouc-Wen模型被用于描述结构的非线性滞回行为,如钢结构的塑性变形、混凝土结构的开裂和钢筋的滑移等。通过将Bouc-Wen模型集成到有限元分析软件中,可以更加准确地预测结构在地震荷载或其他动态荷载作用下的响应,为结构的抗震设计和性能评估提供依据。例如,在桥梁抗震设计中,Bouc-Wen模型可以用于模拟橡胶支座或铅芯橡胶支座的滞回特性,评估桥梁的减震效果。
-
振动控制: 在振动控制领域,Bouc-Wen模型被用于描述阻尼器的非线性滞回特性,如摩擦阻尼器、磁流变阻尼器等。通过优化阻尼器的参数,可以有效地降低结构的振动幅度,提高结构的抗震性能。例如,在建筑结构中,Bouc-Wen模型可以用于模拟磁流变阻尼器的滞回特性,并通过控制磁流变阻尼器的电流,实现对结构振动的自适应控制。
-
材料力学: 在材料力学领域,Bouc-Wen模型被用于描述材料的非线性滞回行为,如金属材料的塑性变形、形状记忆合金的相变过程等。通过将Bouc-Wen模型集成到材料本构模型中,可以更加准确地预测材料在循环荷载作用下的应力-应变关系,为材料的性能评估和寿命预测提供依据。
-
机器人控制: 在机器人控制领域,Bouc-Wen模型被用于描述关节摩擦力或驱动器的非线性滞回特性。通过补偿这些非线性效应,可以提高机器人的控制精度和运动性能。
Bouc-Wen模型参数辨识面临的挑战
尽管Bouc-Wen模型应用广泛,但其参数辨识仍然面临着诸多挑战:
-
非线性优化问题: Bouc-Wen模型的参数辨识是一个非线性优化问题,存在多个局部最优解。传统的优化算法容易陷入局部最优解,导致参数辨识结果不准确。因此,需要开发更加有效的全局优化算法。
-
参数之间的相关性: Bouc-Wen模型的参数之间存在一定的相关性,即改变某个参数的值可能会影响其他参数的辨识结果。这种相关性使得参数辨识更加困难。因此,需要设计合理的实验方案,降低参数之间的相关性。
-
实验数据的噪声干扰: 实验数据中通常存在噪声干扰,如测量误差、环境噪声等。这些噪声干扰会影响参数辨识的精度。因此,需要开发更加鲁棒的参数辨识方法,能够有效地抑制噪声干扰。
-
模型的适用性: Bouc-Wen模型虽然具有强大的表达能力,但并非适用于所有滞回现象。对于某些特殊的滞回现象,Bouc-Wen模型可能难以准确描述。因此,需要根据具体的应用场景,选择合适的滞回模型。
📣 部分代码
tspan=[0.0990000000000000,0.104000000000000,0.109000000000000,0.114000000000000,0.119000000000000,0.124000000000000,0.129000000000000,0.134000000000000,0.139000000000000,0.144000000000000,0.149000000000000,0.154000000000000,0.159000000000000,0.164000000000000,0.169000000000000,0.174000000000000,0.179000000000000,0.184000000000000,0.189000000000000,0.194000000000000,0.199000000000000,0.204000000000000,0.209000000000000,0.214000000000000,0.219000000000000,0.224000000000000,0.229000000000000,0.234000000000000,0.239000000000000,0.244000000000000,0.249000000000000,0.254000000000000,0.259000000000000,0.264000000000000,0.269000000000000,0.274000000000000,0.279000000000000,0.284000000000000,0.289000000000000,0.294000000000000,0.299000000000000,0.304000000000000,0.309000000000000,0.314000000000000,0.319000000000000,0.324000000000000,0.329000000000000,0.334000000000000,0.339000000000000,0.344000000000000,0.349000000000000,0.354000000000000,0.359000000000000,0.364000000000000,0.369000000000000,0.374000000000000,0.379000000000000,0.384000000000000,0.389000000000000,0.394000000000000,0.399000000000000,0.404000000000000,0.409000000000000,0.414000000000000,0.419000000000000,0.424000000000000,0.429000000000000,0.434000000000000,0.439000000000000,0.444000000000000,0.449000000000000,0.454000000000000,0.459000000000000,0.464000000000000,0.469000000000000,0.474000000000000,0.479000000000000,0.484000000000000,0.489000000000000,0.494000000000000,0.499000000000000,0.504000000000000,0.509000000000000,0.514000000000000,0.519000000000000,0.524000000000000,0.529000000000000,0.534000000000000,0.539000000000000,0.544000000000000,0.549000000000000,0.554000000000000,0.559000000000000,0.564000000000000,0.569000000000000,0.574000000000000,0.579000000000000,0.584000000000000,0.589000000000000,0.594000000000000,0.599000000000000,0.604000000000000,0.609000000000000,0.614000000000000,0.619000000000000,0.624000000000000,0.629000000000000,0.634000000000000,0.639000000000000,0.644000000000000,0.649000000000000,0.654000000000000,0.659000000000000,0.664000000000000,0.669000000000000,0.674000000000000,0.679000000000000,0.684000000000000,0.689000000000000,0.694000000000000,0.699000000000000,0.704000000000000,0.709000000000000,0.714000000000000,0.719000000000000,0.724000000000000,0.729000000000000,0.734000000000000,0.739000000000000,0.744000000000000,0.749000000000000,0.754000000000000,0.759000000000000,0.764000000000000,0.769000000000000,0.774000000000000,0.779000000000000,0.784000000000000,0.789000000000000,0.794000000000000,0.799000000000000]';s=[-6.04925122590000,-6.26157565110000,-6.45386944050000,-6.63414516270000,-6.79038475050000,-6.93460469970000,-7.03876416300000,-7.15494169350000,-7.23907052100000,-7.30717499700000,-7.34322998430000,-7.38329125590000,-7.39530932310000,-7.39530932310000,-7.36326062010000,-7.32720563280000,-7.26711372540000,-7.18298489790000,-7.08283171890000,-6.94662355260000,-6.80640910200000,-6.64616401560000,-6.45787572480000,-6.26958821970000,-6.04524494160000,-5.81689537920000,-5.55249161520000,-5.29609884840000,-5.00765816430000,-4.71921669450000,-4.40673909030000,-4.09426148610000,-3.75774617610000,-3.42523793610000,-3.06869277600000,-2.72015939880000,-2.36361423870000,-1.99505101140000,-1.61046264690000,-1.24189941960000,-0.865322837999999,-0.480735259199999,-0.0921406103999993,0.284435185500001,0.665017265700001,1.04159306160000,1.43
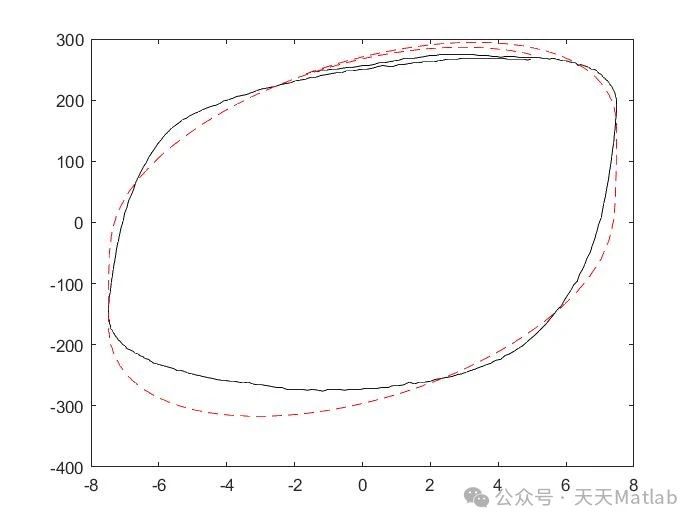
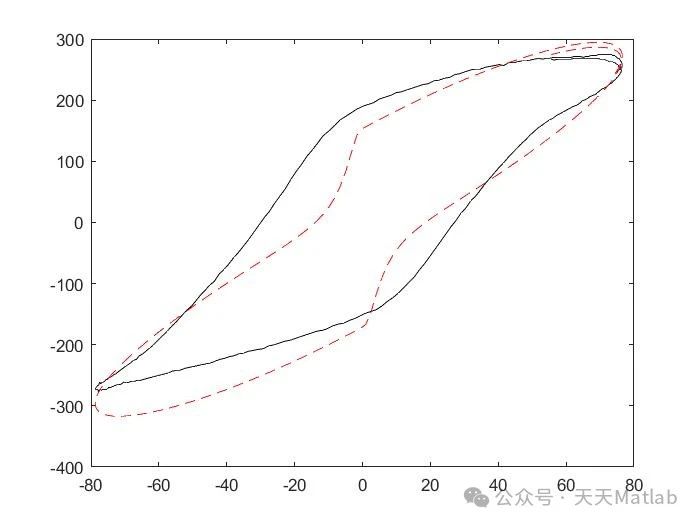
⛳️ 运行结果
🔗 参考文献
[1] 杜文晨.基于Bouc-Wen模型的RC框架梁-柱节点与结构抗震性能分析[D].哈尔滨工业大学,2013.DOI:10.7666/d.D418865.
[2] 杨译.基于Bouc-Wen模型和流体模型的减振器仿真及其整车实验仿真[J].吉林大学, 2011.
🎈 部分理论引用网络文献,若有侵权联系博主删除
👇 关注我领取海量matlab电子书和数学建模资料
🌿 往期回顾可以关注主页,点击搜索
🏆团队擅长辅导定制多种科研领域MATLAB仿真,助力科研梦:
🌈 各类智能优化算法改进及应用
生产调度、经济调度、装配线调度、充电优化、车间调度、发车优化、水库调度、三维装箱、物流选址、货位优化、公交排班优化、充电桩布局优化、车间布局优化、集装箱船配载优化、水泵组合优化、解医疗资源分配优化、设施布局优化、可视域基站和无人机选址优化、背包问题、 风电场布局、时隙分配优化、 最佳分布式发电单元分配、多阶段管道维修、 工厂-中心-需求点三级选址问题、 应急生活物质配送中心选址、 基站选址、 道路灯柱布置、 枢纽节点部署、 输电线路台风监测装置、 集装箱调度、 机组优化、 投资优化组合、云服务器组合优化、 天线线性阵列分布优化、CVRP问题、VRPPD问题、多中心VRP问题、多层网络的VRP问题、多中心多车型的VRP问题、 动态VRP问题、双层车辆路径规划(2E-VRP)、充电车辆路径规划(EVRP)、油电混合车辆路径规划、混合流水车间问题、 订单拆分调度问题、 公交车的调度排班优化问题、航班摆渡车辆调度问题、选址路径规划问题、港口调度、港口岸桥调度、停机位分配、机场航班调度、泄漏源定位
🌈 机器学习和深度学习时序、回归、分类、聚类和降维
2.1 bp时序、回归预测和分类
2.2 ENS声神经网络时序、回归预测和分类
2.3 SVM/CNN-SVM/LSSVM/RVM支持向量机系列时序、回归预测和分类
2.4 CNN|TCN|GCN卷积神经网络系列时序、回归预测和分类
2.5 ELM/KELM/RELM/DELM极限学习机系列时序、回归预测和分类
2.6 GRU/Bi-GRU/CNN-GRU/CNN-BiGRU门控神经网络时序、回归预测和分类
2.7 ELMAN递归神经网络时序、回归\预测和分类
2.8 LSTM/BiLSTM/CNN-LSTM/CNN-BiLSTM/长短记忆神经网络系列时序、回归预测和分类
2.9 RBF径向基神经网络时序、回归预测和分类
2.10 DBN深度置信网络时序、回归预测和分类
2.11 FNN模糊神经网络时序、回归预测
2.12 RF随机森林时序、回归预测和分类
2.13 BLS宽度学习时序、回归预测和分类
2.14 PNN脉冲神经网络分类
2.15 模糊小波神经网络预测和分类
2.16 时序、回归预测和分类
2.17 时序、回归预测预测和分类
2.18 XGBOOST集成学习时序、回归预测预测和分类
2.19 Transform各类组合时序、回归预测预测和分类
方向涵盖风电预测、光伏预测、电池寿命预测、辐射源识别、交通流预测、负荷预测、股价预测、PM2.5浓度预测、电池健康状态预测、用电量预测、水体光学参数反演、NLOS信号识别、地铁停车精准预测、变压器故障诊断
🌈图像处理方面
图像识别、图像分割、图像检测、图像隐藏、图像配准、图像拼接、图像融合、图像增强、图像压缩感知
🌈 路径规划方面
旅行商问题(TSP)、车辆路径问题(VRP、MVRP、CVRP、VRPTW等)、无人机三维路径规划、无人机协同、无人机编队、机器人路径规划、栅格地图路径规划、多式联运运输问题、 充电车辆路径规划(EVRP)、 双层车辆路径规划(2E-VRP)、 油电混合车辆路径规划、 船舶航迹规划、 全路径规划规划、 仓储巡逻
🌈 无人机应用方面
无人机路径规划、无人机控制、无人机编队、无人机协同、无人机任务分配、无人机安全通信轨迹在线优化、车辆协同无人机路径规划
🌈 通信方面
传感器部署优化、通信协议优化、路由优化、目标定位优化、Dv-Hop定位优化、Leach协议优化、WSN覆盖优化、组播优化、RSSI定位优化、水声通信、通信上传下载分配
🌈 信号处理方面
信号识别、信号加密、信号去噪、信号增强、雷达信号处理、信号水印嵌入提取、肌电信号、脑电信号、信号配时优化、心电信号、DOA估计、编码译码、变分模态分解、管道泄漏、滤波器、数字信号处理+传输+分析+去噪、数字信号调制、误码率、信号估计、DTMF、信号检测
🌈电力系统方面
微电网优化、无功优化、配电网重构、储能配置、有序充电、MPPT优化、家庭用电
🌈 元胞自动机方面
交通流 人群疏散 病毒扩散 晶体生长 金属腐蚀
🌈 雷达方面
卡尔曼滤波跟踪、航迹关联、航迹融合、SOC估计、阵列优化、NLOS识别
🌈 车间调度
零等待流水车间调度问题NWFSP 、 置换流水车间调度问题PFSP、 混合流水车间调度问题HFSP 、零空闲流水车间调度问题NIFSP、分布式置换流水车间调度问题 DPFSP、阻塞流水车间调度问题BFSP
👇


















 1816
1816

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











