







目录
概述
编码器通常用来测量角度或位置,并将其转换为数字信号。在这种情况下,角秒是一个角度单位,分辨率是编码器能够区分的最小角度变化。角秒是角度的单位,通常用于非常精确的角度测量。1角秒等于1/3600度或1/60分之一角分。分辨率是编码器测量角度时的精度,它表示编码器能够区分的最小角度变化。例如,一个分辨率为1角秒的编码器意味着它可以探测到角度的最小变化为1角秒。因此,编码器的角秒和分辨率之间存在着关联,分辨率越高,编码器能够测量的最小角度变化就越小,通常以角秒为单位来表示。
1. 基本概念
-
角秒定义:1度 = 60角分,1角分 = 60角秒 → 1度 = 3600角秒
-
编码器分辨率:指单步可检测的最小角度变化,通常以每转脉冲数(PPR)或绝对位数表示。
2. 计算公式
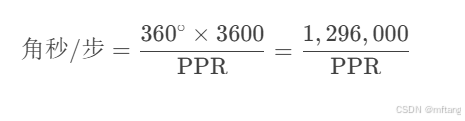
2.1 增量式编码器(PPR)
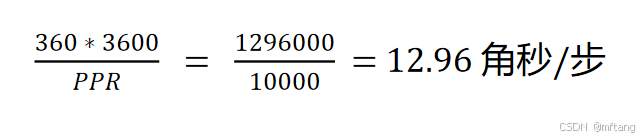
示例:
编码器参数如下:
PPR = 10,000
编码器的角秒计算方法:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1069
1069

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









