






5辆车组成的编队实现ACC自适应协同控制,通过考虑前车的加速度和距离,实现自适应巡航控制,仿真平台基于carsim/Simulink实现。
算法结构分为两层,上层滑膜控制器差生期望的加速度,下层通过控制节气门开度和刹车制动压力控制车速。
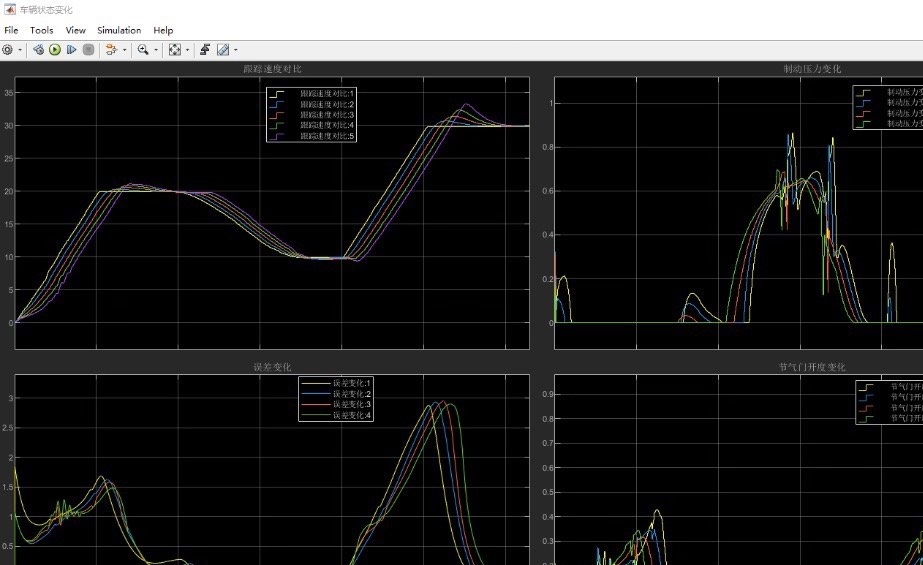
仿真结果图给出了5辆车前车与后车的跟踪误差、5辆车车速的变化、4辆车节气门和制动压力的变化
人觉得从结果图中看出基于滑膜控制的效果非常好,不亚于模型预测控制mpc!!!并且在实车试验很方便。
文件包含acc巡航建模资料和滑膜控制的资料,非常的详细,比一般只给文件仿真详细多啦,还有我本人滑膜控制的总结,对于滑膜控制的学习很有帮助。
YID:89260725017452223
想剁手书屋14

自适应巡航控制(ACC)是一种智能驾驶技术,通过考虑前车的加速度和距离,实现编队车辆间的自适应协同控制。本文基于5辆车组成的编队,使用ACC实现了自适应巡航控制,并通过仿真平台验证了其效果。本文主要介绍了ACC的算法结构、控制思想以及仿真结果分析。
首先,ACC的算法结构分为两层,即上层滑膜控制器和下层车速控制。上层滑膜控制器根据前车的加速度和距离生成期望的加速度,下层通过控制节气门开度和刹车制动压力来控制车速。这种分层结构可以有效解耦控制器,提高系统的稳定性和鲁棒性。
其次,本文通过仿真实验验证了ACC的效果。仿真结果图展示了5辆车的前车与后车的跟踪误差、车速的变化以及节气门和制动压力的变化。从结果图中可以看出,基于滑膜控制的ACC效果非常好,不亚于模型预测控制(MPC)。并且,在实车试验中也能够很方便地进行应用。
此外,本文还提供了ACC巡航建模资料和滑膜控制的详细资料。这些资料非常详细,比一般的仿真文件更加全面,对学习滑膜控制有很大的帮助。同时,作者本人还对滑膜控制进行了总结,对于滑膜控制的学习者来说,这是一份非常有价值的资料。
综上所述,本文围绕5辆车组成的编队实现了ACC自适应协同控制,并通过仿真平台进行了验证。通过介绍ACC的算法结构、控制思想以及仿真结果分析,展示了滑膜控制的优越性,并提供了相关资料供学习者参考。ACC技术在未来的智能驾驶领域有着广阔的应用前景,值得进一步的研究和探索。
以上相关代码,程序地址:http://wekup.cn/725017452223.html















 713
713











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









