







比赛项目实现过程
第一步:设置远程桌面连接
登录机器人系统,设置网络,参考远程桌面连接20230525.mp4
- 外接显示器、鼠标和键盘

- 登录系统
账户:robuster 密码:123456
建议,手机开热点,机器人和配备的电脑都要连接手机热点,使两节点在同一个局域网下
- 连接热点
开启手机热点,在系统右下角找到自己热点名,如果找到,记得查看More Networks,连接热点,输入设置的热点密码就行

- 查看网络节点
Ctrl+Alt+T为打开Linux终端运行界面,终端窗口输入ifconfig,如下图

注意:手机拍照记下IP(inet),用于电脑远程桌面连接
系统WiFi,找到 Edit Connection,可以编辑连接的热点




最右下角, 记得Save
- 系统Logout->Logout


第二步:建图导航
参考视频,建图导航20230605.mp4
此过程,蒋俊杰和李祖超两组,已用两机器,完成建图
注意:已经实现自动避障功能,完成建图,可手动控制机器人
第三步:识别控制
- 打开手柄控制程序
按照下图,找到logitech_teleop_node.cpp,并查看程序代码和对应遥控器按键控制的功能。





- 打开功能程序
上述程序对应的功能,可以在beetle_ai文件夹下找到
第一种方式:



第二种方式:强烈推荐

- 修改功能

根据任务要求,修改功能
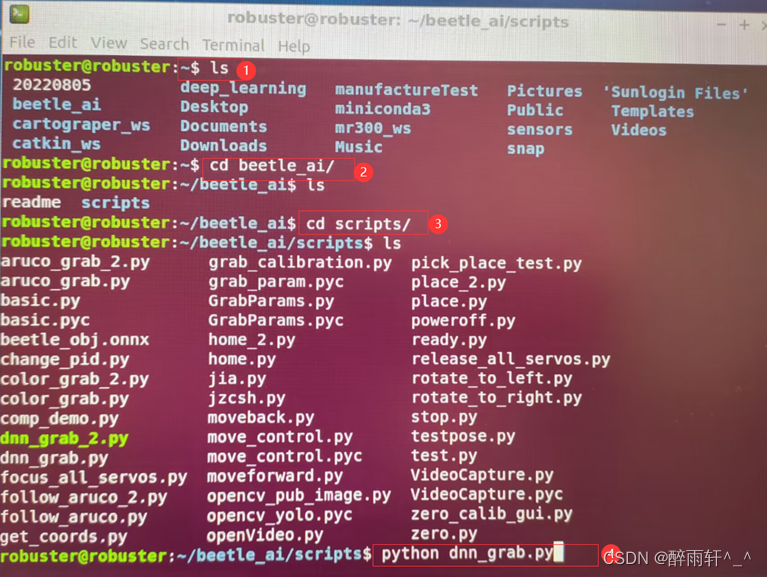
- 运行功能程序
记住常用几个Linux命令
ls:查看当前文件夹下的文件
cd beetle_ai:进入后面的文件夹下,快捷方式,输入cd bee,然后按Tab键,系统自动补全所有文件名
python: Linux运行对应的文件
注意:
- 抓取功能,抓取货物偏差很大,看看关节的所有零位是否校准,参考零位校准和手眼标定20230613.mp4
- 抓取货物时,需要设置机械臂从抓取货物位置->放下货物时机械臂的位置,这些位置参考机械臂使用20230608(1).mp4获取,获取的位置都要需要在代码中用到的,可以参照dnn_grab_2.py文件中,设置机械臂位置。
- 当前,油和粮抓取功能未实现,
- 采集油和粮图像数据
- 训练油和粮识别模型
- 参照dnn_grab.py和dnn_grab_2.py文件,实现油量抓取功能















 4677
4677











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









