






想让机械臂知道操作台上的东西在他的哪个位置,并成功抓起,标定步骤很重要,我理解要实现这个过程可以分为两部分:相机标定和手眼标定,相机标定的目的主要是为了获得相机的内参矩阵以及畸变系数,手眼标定主要是获得相机与机械臂基座的映射关系。
相机标定
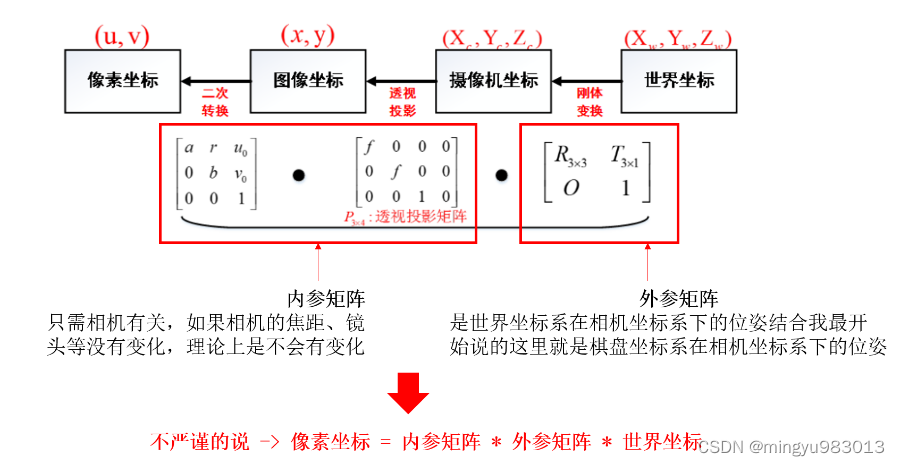
相机知道的是像素坐标,机械手是空间坐标系,所以手眼标定就是得到像素坐标系和空间机械手坐标系的坐标转化关系。在实际控制中,相机检测到目标在图像中的像素位置后,通过标定好的坐标转换矩阵将相机的像素坐标变换到机械手的空间坐标系中,然后根据机械手坐标系计算出各个电机该如何运动,从而控制机械手到达指定位置。
手眼标定
手眼标定分为两种方式:眼在手上(eye in hand)、眼固定(eye to hand)。
眼在手上(eye in hand)
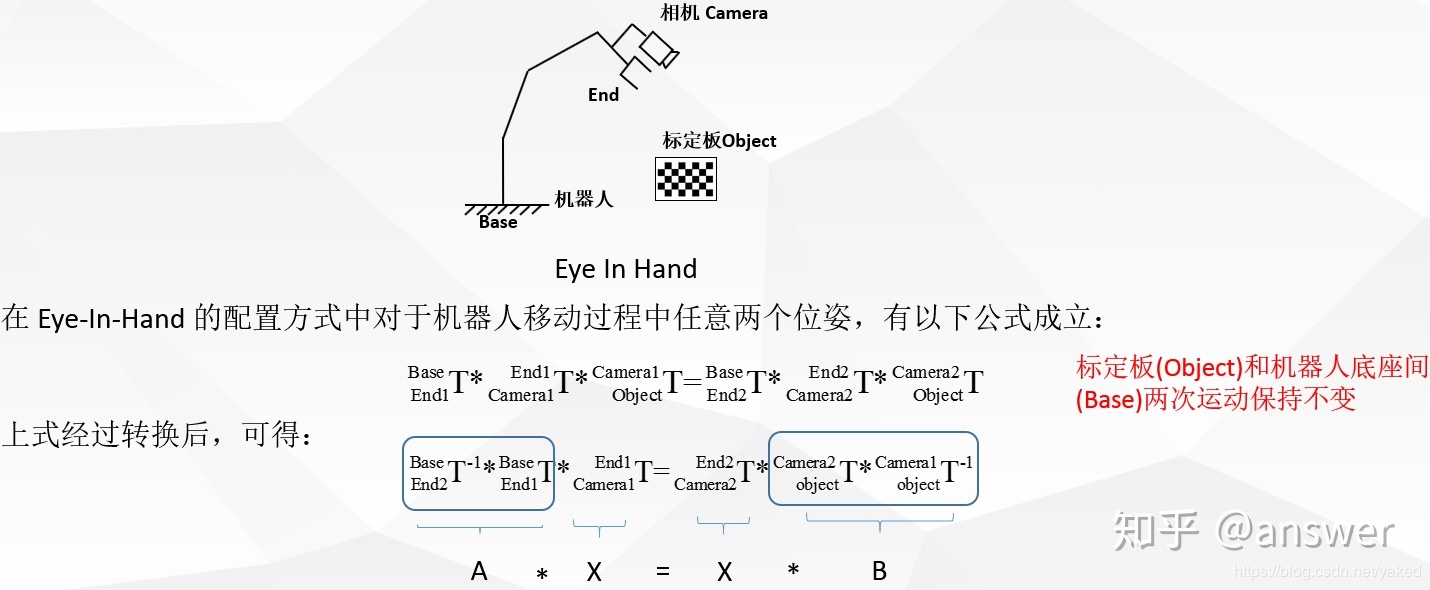
目标:求相机与机械手臂末端的关系。

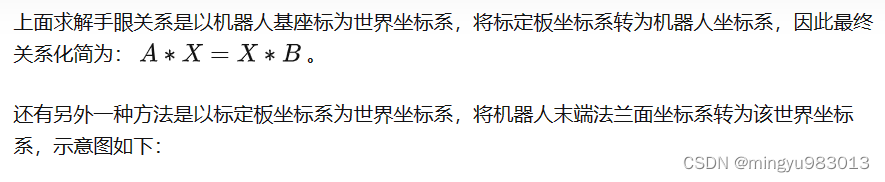
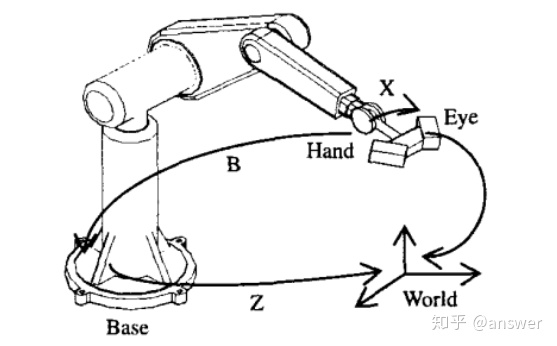
眼固定(eye to hand)

眼固定的意思是相机固定安放不随机械手臂末端移动。
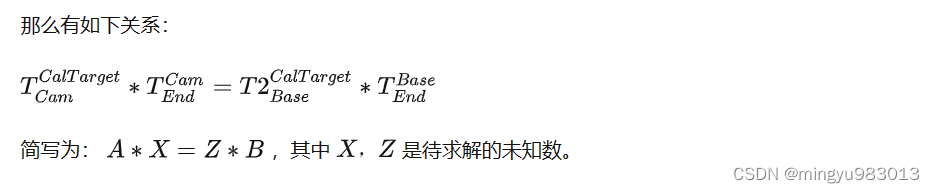
目标:求解相机与器械手臂末端的关系。
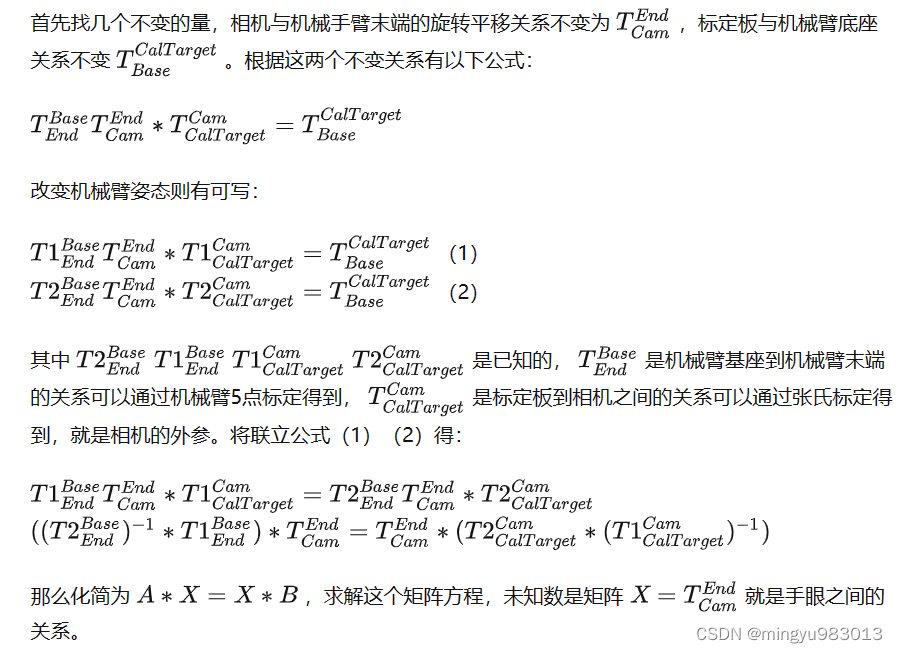
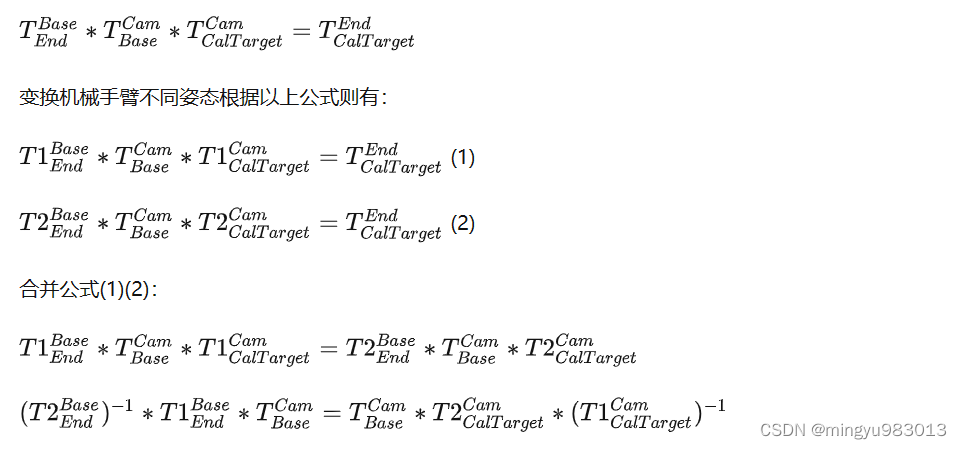
同样先找几个不变的关系,机械手臂与相机位置固定不变,机械手臂末端与标定板位置固定不变。(标定板固定在机械臂末端夹具上)根据机械手臂末端与标定板位置固定不变,则有以下公式。

















 9554
9554











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









