






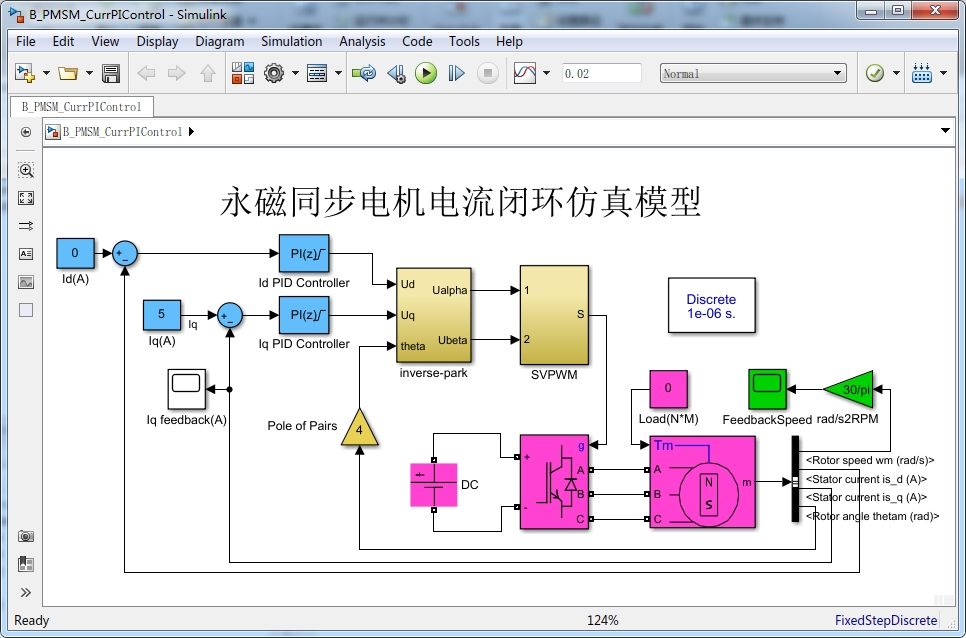
永磁同步电机(PMSM),坐标变换到d-q轴后,采用SVPWM调制算法,采用Id=0进行永磁同步电机电流环的设计,电流环采用两个PI控制器进行电流的控制。
默认发MATLAB R2018b版本
ID:457618592320228
利维能干的贝壳
永磁同步电机 (Permanent Magnet Synchronous Motor, PMSM) 是一种应用广泛的电机类型,其在许多领域中发挥着重要作用,如工业自动化、电动车辆和可再生能源等。PMSM电机具有高效率、高功率密度和高动态响应等优势,因此受到了广大工程师和学术研究者的关注和研究。
在永磁同步电机控制中,坐标变换是一种常用的控制方法,通过将三相电流转换到d-q轴上,实现电机控制的简化。坐标变换技术可以有效地降低电机控制的复杂性,使得控制系统更容易设计和实现。
一种常用的坐标变换技术是dq坐标系,其中d轴是直轴,q轴是正交轴。通过坐标变换,我们可以将三相电流转换到d-q轴上,以方便对电机进行控制。在PMSM控制中,我们采用SVPWM (Space Vector Pulse Width Modulation) 调制算法来生成PWM (Pulse Width Modulation)波形,以控制电机的速度和转矩。
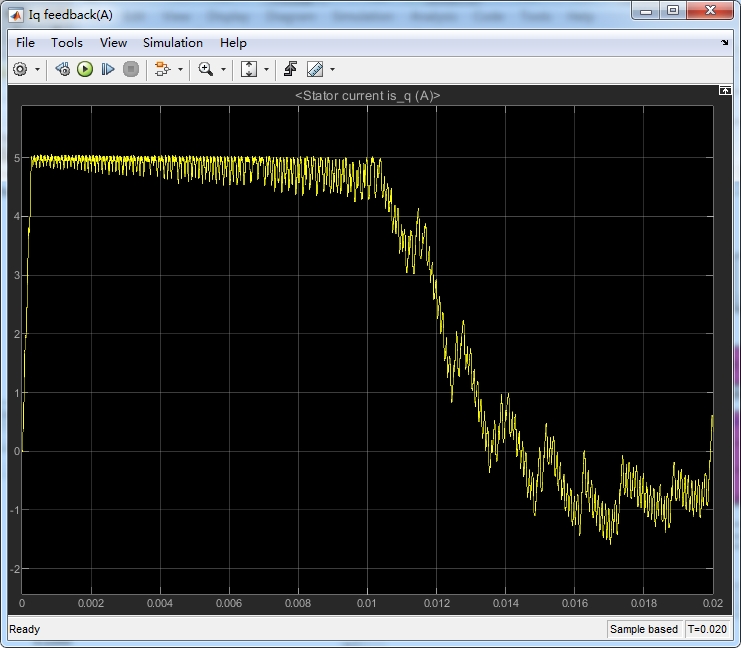
在PMSM电机中,电流控制是至关重要的一环。为了实现精确的电流控制,我们设计了一个电流环控制系统,并采用了Id=0的控制策略。这种控制策略意味着在d-q坐标系中,电机的电流矢量只在q轴上存在,而在d轴上的电流为零。这样做的目的是最大程度地减小转矩与磁场之间的耦合,从而提高电机的效率和控制性能。
为了实现电流环的控制,我们采用了两个PI (Proportional-Integral) 控制器来对电流进行调节。PI控制器是一种经典的反馈控制器,通过比较实际电流与期望电流的差异,生成控制信号来调节电流。其中,比例项和积分项分别负责快速响应和稳定性。
在MATLAB R2018b版本中,我们可以使用Simulink工具箱对PMSM电机进行建模和仿真。通过建立电机的数学模型,并采用SVPWM调制算法,我们可以模拟出电机在不同工况下的运行情况。同时,通过设计和调整PI控制器的参数,我们可以实现对电机电流的精确控制。
综上所述,永磁同步电机是一种应用广泛的电机类型,在许多领域中都具有重要的应用价值。通过坐标变换和SVPWM调制算法,可以实现对电机速度和转矩的精确控制。在电流控制中,采用了Id=0的策略,并设计了两个PI控制器来调节电流。通过MATLAB的Simulink工具箱,我们可以对PMSM电机进行建模和仿真,以验证控制算法的有效性。这些技术和方法,为永磁同步电机的控制和应用提供了重要的参考和指导。
希望本文的内容能够为程序员社区的读者们提供一些有益的技术分析,帮助他们更好地理解和应用永磁同步电机控制技术。同时,本文也呼吁广大工程师和学术研究者对永磁同步电机的控制和优化进行深入的研究,并推动其在工业和社会中的广泛应用。
相关代码 程序地址:http://nodep.cn/618592320228.html















 2758
2758











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









