







系列文章目录
- Turtlebot3-burger入门教程#foxy版#-目录
- Turtlebot3-burger入门教程#foxy版#-硬件清单
- Turtlebot3-burger入门教程#foxy版#-软件清单
- Turtlebot3-burger入门教程#foxy版#-PC安装
- Turtlebot3-burger入门教程#foxy版#-树莓派4安装
- Turtlebot3-burger入门教程#foxy版#-OpenCR安装
- Turtlebot3-burger入门教程#foxy版#-网络设置
- Turtlebot3-burger入门教程#foxy版#-雷达测试
- Turtlebot3-burger入门教程#foxy版#-键盘控制
- Turtlebot3-burger入门教程#foxy版#-cartographer建图
- Turtlebot3-burger入门教程#foxy版#-slam toolbox建图
- Turtlebot3-burger入门教程#foxy版#-自主导航
说明:
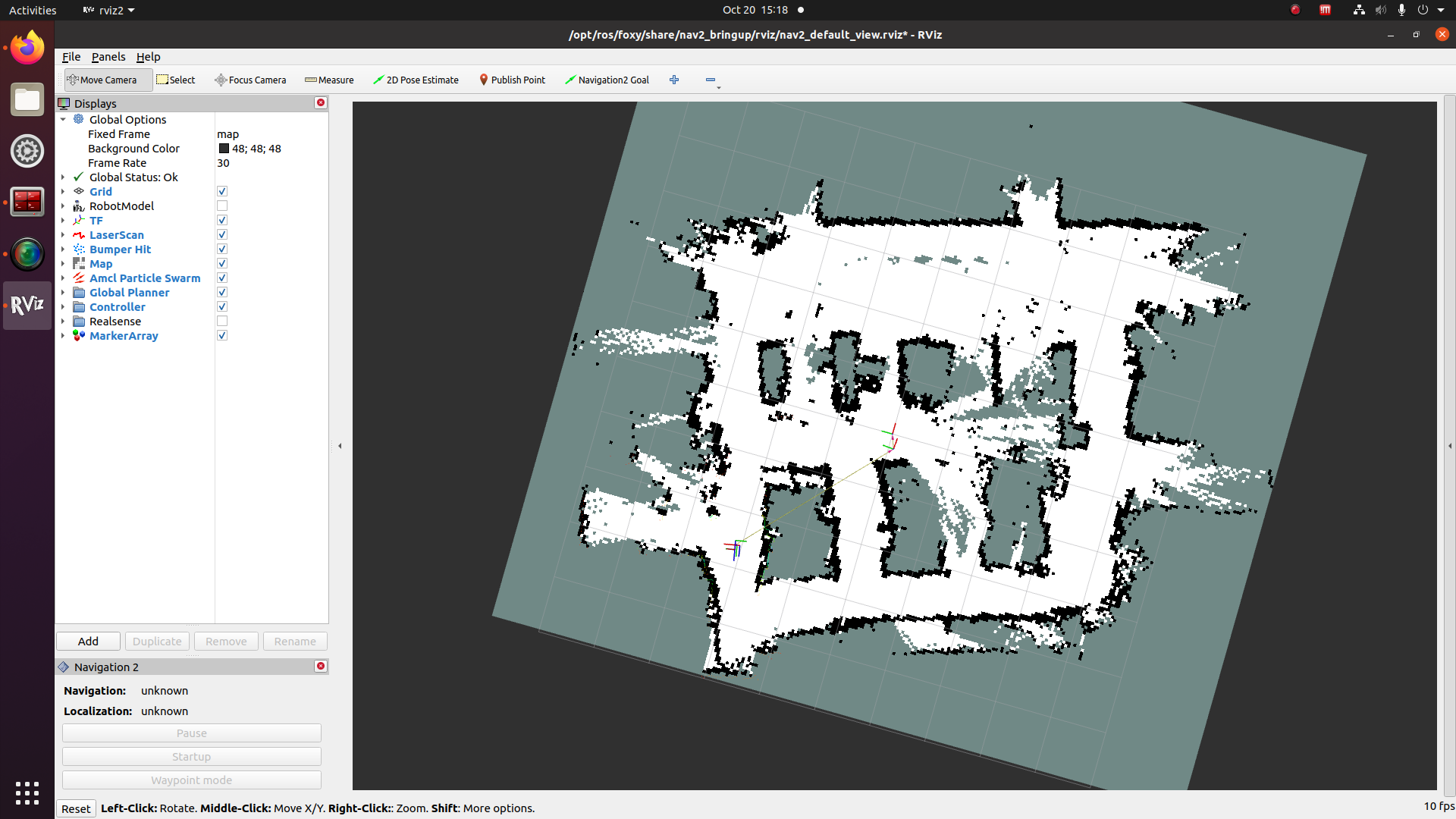
- 本教程介绍如何使用slam toolbox算法建图
相关设备
- TB3套件:采购地址
操作步骤
- [Turtlebot] 启动TB3
$ ros2 launch turtlebot3_bringup robot.launch.py
- [Remote PC] 启动slam toolbox算法建图程序
$ ros2 launch slam_toolbox online_async_launch.py use_sim_time:=false
- [Remote PC] 打开可视化界面
$ ros2 launch nav2_bringup rviz_launch.py
- [Remote PC] 启动键盘控制
$ ros2 run turtlebot3_teleop teleop_keyboard
- 控制小车移动建图
- [Remote PC] 保存地图
$ ros2 run nav2_map_server map_saver_cli -f ~/map --ros-args -p save_map_timeout:=10000
- map.pgm和map.yaml两个文件将会被保存到系统的HOME目录下














 1035
1035











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









