







ADIS16488A产品简介
ADIS16488(下载用户手册)是ANALOG DEVICES公司的一款战术级、10自由度(含陀螺仪、加速计、磁罗盘和气压计)惯性传感器。主要应用于平台稳定与控制、导航、人员跟踪、仪器仪表、机器人等行业领域。
ADIS16488A iSensor是一款完整的惯性系统,内置一个三轴陀螺仪、一个三轴加速度计、一个三轴磁力计和一个压力传感器。每个惯性传感器都实现了业界领先的iMEMS®技术与信号调理技术的完美结合,可提供优化的动态性能。工厂校准针对各传感器的灵敏度、偏置、对准和线性加速度(陀螺偏置)进行校准。因此,各传感器均有其自己的动态补偿公式,可提供精确的传感器测量。
与复杂且昂贵的分立设计方案相比,ADIS16488A为精确的多轴惯性检测与工业系统的集成提供了简单而高效的方法。所有必需的运动测试及校准都是工厂生产过程的一部分,大大缩短了系统集成时间。严格的正交对准可简化导航系统中的惯性坐标系对准。SPI和寄存器结构针对数据收集和配置控制提供简单的接口。
国产化替代IMU推荐
目前ADIS16488A的国内平替产品主要有以下三款:
- 中电科芯片研究院的GM16488
- 北京星际导控的SNC200A
- 西安精准测控的PA-IMU488B
NextPilot开发团队,深度使用过中电科芯片研究院GM16488和北京星际导控SNC200A两个型号,它们都是成熟货架产品,已批量交付数万套以上。但是跟ADIS16488A有一些小区别:
| ADIS16488 | GM16488 | SNC200A | |
|---|---|---|---|
| 传感器 | IMU+BARO+MAG | 标准版IMU,兼容版可以扩展IMU+BARO+MAG | IMU,高级版可扩展IMU+BARO+MAG |
| IMU性能 | ★★★ | ★★★★★ 自研陀螺仪,航向融合不依赖MAG |
★★★★ |
| 通信接口 | SPI | 标准版RS422,兼容版SPI或UART | UART |
| 供电电压 | 3.3V | 标准版本5.0,兼容版3.3V | 3.3V |
| 采样频率 | 200-2000Hz | 200-xxHz | |
| 产品特色 | 内部灌胶工艺,0-2000Hz没有共振和混叠,支持与无人机直接固定连接 | 内置处理器,可以运行组合导航算法,输出融合后的姿态和位置 |
中电科芯片研究院GM16488
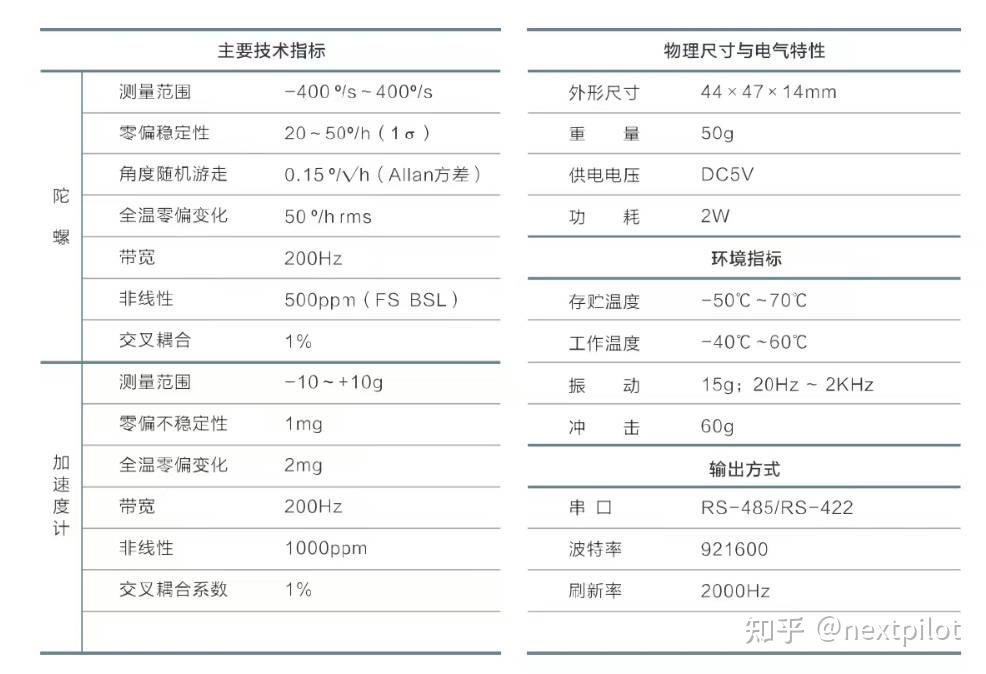
在使用GM16488的过程中,印象最深的时候,IMU直接与无人机刚性连接不需要减震,另外是自研陀螺仪性能优越,无需磁罗盘校正航向。GM16488标准版的主要技术指标(部分指标已经更新,比如陀螺零偏稳定性大概在10°/h,工作温度-40~95℃):
北京精准测控PA-IMU488B
惯性测量单元PA-IMU488B是一款国产化的高性能、小体积、耐高过载的惯性测量设备,陀螺零偏稳定性2°/h(Allan),加速度计零偏稳定性50µg(Allan)。可用于精确导航、控制和动态测量。此系列产品采用高精度MEMS惯性器件,具有高可靠性和高坚固性,在恶劣环境下仍能精密的测量运动载体的角速度和加速度信息。
该惯性测量单元,内置GPS/BD单频双模卫星接收机,搭载了三轴磁传感器,同时集成了气压传感器,可实现高度测量。工作模式可在组合导航、AHRS、垂直陀螺等状态下灵活切换。可以满足多种组合导航应用需求,特别适用于无人机、车载导航、水面航行器等各类运动物体的导航及控制。
本产品搭载了自主知识产权的全新组合导航融合算法,可实现高灵敏度跟踪、开阔空间的准确定位,同时也可满足城市、深林、峡谷等地形的导航应用。该系统经过精心设计,将具备卓越组合导航性能的系统尺寸缩小至空前紧凑,并实现了质量的最小化。
惯性测量单元PA-IMU488B款内置三轴陀螺、三轴加表的用于测量载体的三轴角速率,三轴加速度。通过串口按照约定通讯协议输出经过误差补偿(包括温度补偿、安装失准角补偿、非线性补偿等)的陀螺、加表数据。
组合导航系统PA-GS488B在惯性测量单元的基础上三轴磁传感器、气压传感器、卫星接收机,并内置了组合导航融合算法。输出融合后的姿态、航向、速度、高度、位置、时钟等信息。
| 参数 |
测试条件 |
最小值 |
典型值 |
最大值 |
单位 |
|
| 陀螺仪 |
测量范围 |
±400 |
±450 |
— |
deg/s |
|
| 零偏稳定性 |
Allan方差 |
— |
2 |
— |
deg /h |
|
| 随机游走 |
— |
0.1 |
— |
deg /√h |
||
| 零偏重复性 |
全温范围 −40°C ≤ TA ≤ +85°C |
|||||
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









