






参考链接:https://zhuanlan.zhihu.com/p/346665590
1、尺度地图
具有真实的物理尺度,eg.栅格地图、点云地图,常用于SLAM、小场景路径规划
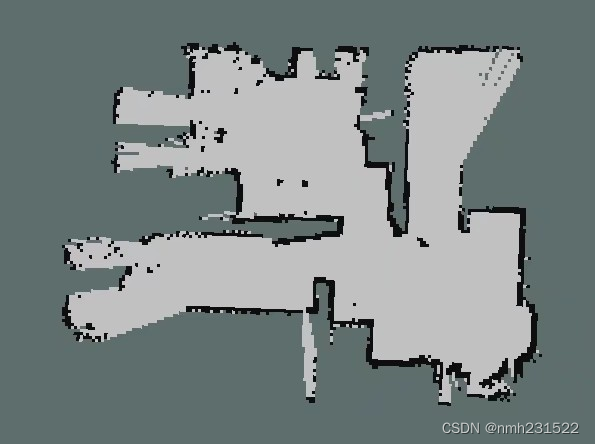
栅格地图时结构化且有序的,能够直接使用位置索引查询该位置状态,查询时间复杂度为O(1)。但栅格地图对场景进行密集的切分,内存占用较大。一种常用的栅格地图格式是PGM,PGM是Portable Gray Map的缩写。它是灰度图像格式中一种最简单的格式标准,在ROS中使用2D激光雷达和Gmapping功能包生成的栅格地图就是PGM地图,如下图:
Octo-map(八叉树地图)
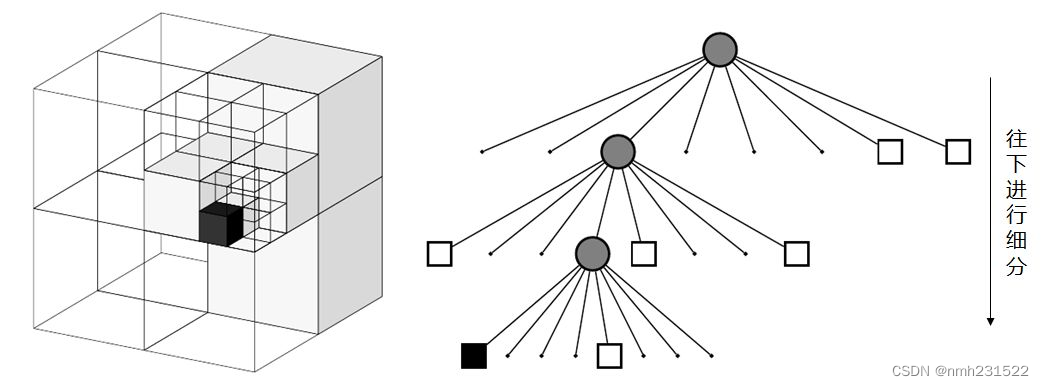
对于三维地图,通过观察可以发现障碍物只是其中一小部分,我们可以使用一些特殊的数据结构来存储,比如八叉树(octree)。octree就是有八个子节点的树,是一种递归、轴对齐且空间间隔的数据结构,常用于3D数据的表达。
假设某个空间是一个立方体,这个立方体中有一个小障碍物,我们可以直接将这个立方体标记为占用状态,很显然这种方式太粗糙了,我们需要一种更精细的方法。当然可以使用三维栅格地图,将立方体分成很多个符合精度要求的小立方体,然后对障碍物所在的小立方体进行标记,但是占用内存太大,障碍物只是占据空间中很小一部分,很多空闲状态的立方体并不需要专门分配内存进行标记。
那么如何兼顾精度和内存呢?这时候就该祭出八叉树结构了。
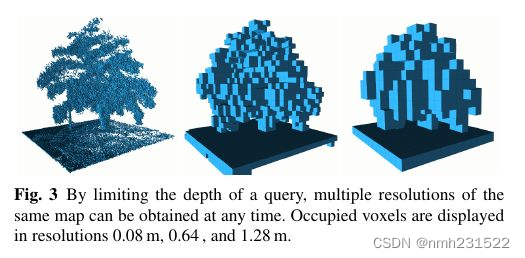
可以将这个立方体分成八个小立方体,对包含障碍物的立方体继续进行分割,直到达到我们想要的精度为止。当某个节点的所有子节点都是占据、空闲或者未知状态时,我们可以将它和它的子节点全部剪掉,这样可以极大的减少占用的内存空间
但是Octomap不能直接使用索引进行查询,要按照树的结构进行递归查询,这也是一种牺牲时间换空间的方法吧。
能够减少内存的占用的地图形式还有Voxel Hashing。
Point cloud map(点云地图)
点云是一系列点的集合,使用不用方法得到的点云有不同的数据结构,根据激光测量原理得到的点云包含三维坐标和激光反射强度数据;根据视觉测量得到的点云数据包含三维坐标和颜色数据。根据点的稀疏程度不同,可以分为稀疏点云地图和稠密点云地图,稀疏地图主要用于机器人定位,稠密地图经过转换后可以导航,比较常用的转换方法是八叉树地图。
2、拓扑地图
不具备真实的物理尺度,只包含不同位置的连通关系和距离,常用于大规模的机器人路径规划
3、语义地图
在尺度地图上添加标签,常用于人机交互。高德地图
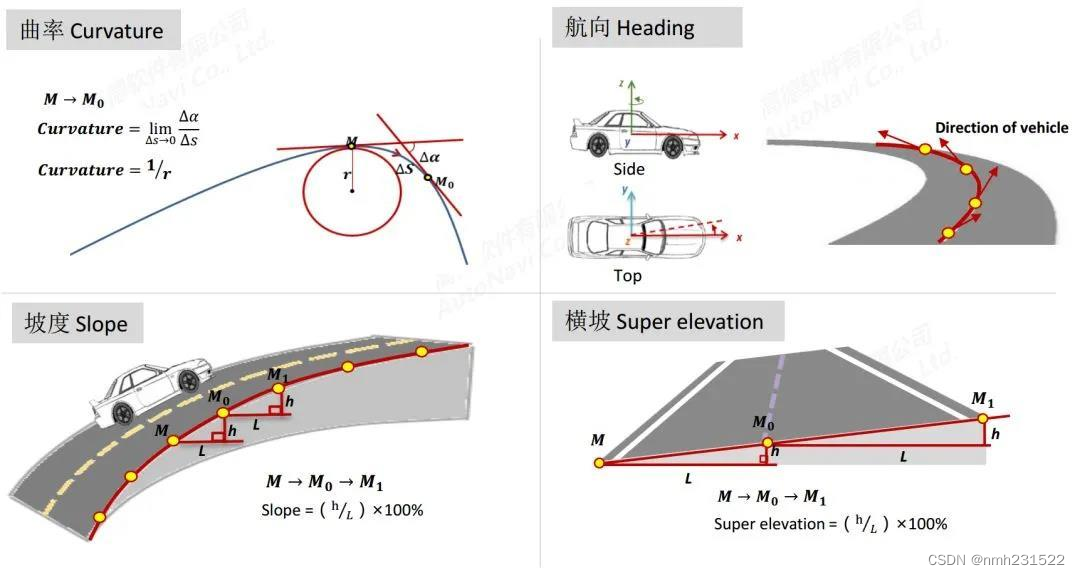
高精度地图可以为无人车提供的先验信息包括:道路曲率、航向、坡度和横坡角······
在开始引入之前,先提一下两个地图格式:
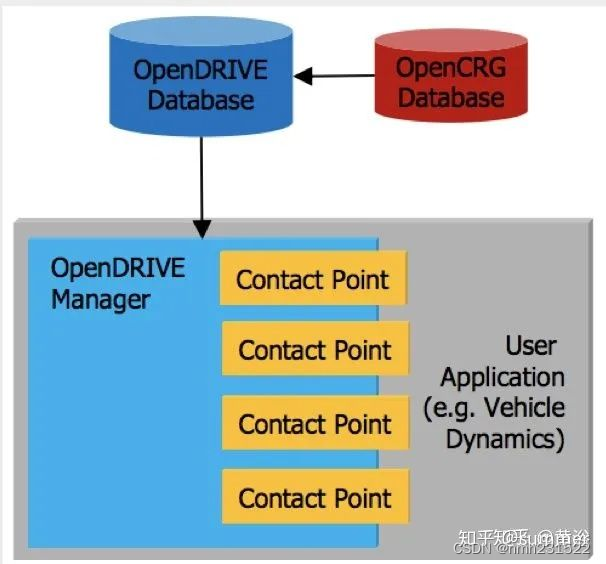
- OpenDrive
一种逻辑描述道路网的开源格式,主要在仿真器领域使用。其中OpenCRG是路面特性描述格式。OpenDRIVE Manager (OdrManager) 管理如何读取数据。
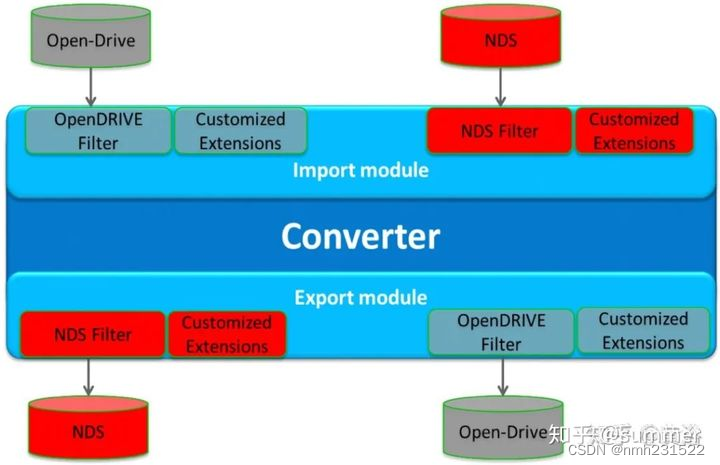
2. NDS:Navigation Data Standard
汽车业导航数据库标准化的格式。二者之间的转换如下图:















 6527
6527











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









