







 本文描述了一名研究生在学习广义预测控制理论后,实践编程实现了该控制算法,并通过示例展示了如何使用RLS进行辨识参数估计、处理控制增量和输出数据。结果通过图形展示参数随时间的变化以及系统的响应情况。
本文描述了一名研究生在学习广义预测控制理论后,实践编程实现了该控制算法,并通过示例展示了如何使用RLS进行辨识参数估计、处理控制增量和输出数据。结果通过图形展示参数随时间的变化以及系统的响应情况。
研究生正在学习研究广义预测控制,根据书中的内容和自己的修改完善了广义预测控制代码,已跑通
clear all;close all;
a=[1 -2 1.1];b=[1 2];c=1;d=1;%对象参数
na=length(a)-1; b=[zeros(1,d-1) b]; nb=length(b);%多项式A、B、C阶次(因d!=0,对b添0)
naa=na+1; %aa的阶次
N1=d; N=8; Nu=5; %最小输出长度、预测长度、控制长度
gamma=10*eye(Nu); alpha=0.7; %控制加权矩阵、输出柔化系数
L=400; %控制步数
uk=zeros(d+nb,1); %输入初值:uk(i)表示u(k-i)
duk=zeros(d+nb,1); %控制增量初值
yk=zeros(na,1); %输出初值
dyk=zeros(na,1); %输出增量初值
w=10*[ones(L/4,1);-ones(L/4,1);ones(L/4,1);-ones(L/4+d,1)]; %设定值——期望输出
xi=sqrt(0.01)*randn(L,1); %白噪声序列
%RLS初值
thetae_1=0.001*ones(na+nb-d+2,1); %不辨识b中添加的0
P=10^6*eye(na+nb-d+2);
lamda=1; %遗忘因子[0.9 1]
for k=1:L
time(k)=k;
dy(k)=(-dyk(1:na)')*a(2:na+1)'+duk(1:nb)'*b'; %利用历史数据求出det y
y(k)=yk(1)+dy(k); %采集系统当前输出数据
Yk=[y(k);yk(1:na)]; %构建向量Y(k)——当前及过去的输出
dUk=duk(1:nb); %构建向量△U(k-j)——过去的控制增量向量
%参考轨迹
yr(k)=y(k);
for i=1:N
yr(k+i)=alpha*yr(k+i-1)+(1-alpha)*w(k+d);
end
Yr=[yr(k+N1:k+N)]; %构建向量Yr(k)——未来参考轨迹
%遗忘因子递推最小二乘法
phie=[-dyk(1:na);duk(d:nb+d)]; %duk-d:d+nb+1?
K=P*phie/(lamda+phie'*P*phie);
thetae(:,k)=thetae_1+K*(dy(k)-phie'*thetae_1);
P=(eye(na+nb-d+2)-K*phie')*P/lamda;
%提取辨识参数
ae=[1 thetae(1:na,k)']; be=[zeros(1,d-1) thetae(na+1:na+nb-d+2,k)'];
aae=conv(ae,[1 -1]);
%求解多步Diophantine方程并构建F1、F2、G
[E,F,G]=multidiophantine(aae,be,c,N);
G=G(N1:N,:);
F1=zeros(N-N1+1,Nu); F2=zeros(N-N1+1,nb);
for i=1:N-N1+1
for j=1:min(i,Nu)
F1(i,j)=F(i+N1-1,i+N1-1-j+1);
end
for j=1:nb
F2(i,j)=F(i+N1-1,i+N1-1+j);
end
end
%求控制量
dU=inv(F1'*F1+gamma)*F1'*(Yr-F2*dUk-G*Yk); %△U
du(k)=dU(1);
u(k)=uk(1)+du(k);
%更新数据
thetae_1=thetae(:,k);
for i=1+nb:-1:2
uk(i)=uk(i-1);
duk(i)=duk(i-1);
end
uk(1)=u(k);
duk(1)=du(k);
for i=na:-1:2
yk(i)=yk(i-1);
dyk(i)=dyk(i-1);
end
yk(1)=y(k);
dyk(1)=dy(k);
end
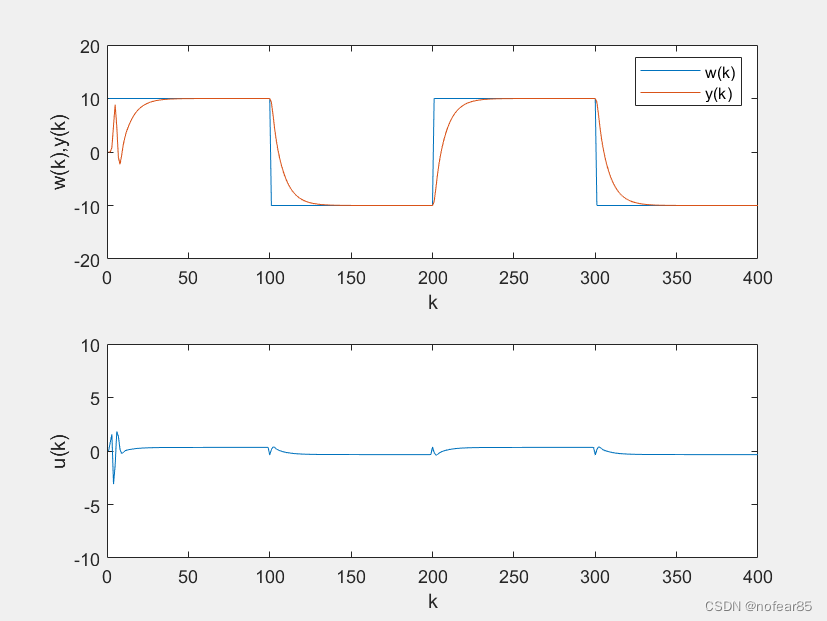
figure(1)
subplot(2,1,1);
plot(time,w(1:L));
hold on
plot(time,y)
xlabel('k');ylabel('w(k),y(k)');
legend('w(k)','y(k)');axis([0 time(k) -20 20]);
subplot(2,1,2)
plot(time,u);
xlabel('k');ylabel('u(k)');axis([0 time(k) -10 10]);
figure(2)
plot([1:L],thetae);
xlabel('k');ylabel('辨识参数a,b');
legend('a_1','a_2','a_3','b_0','b_1');axis([0 L -3 3]);
结果如图: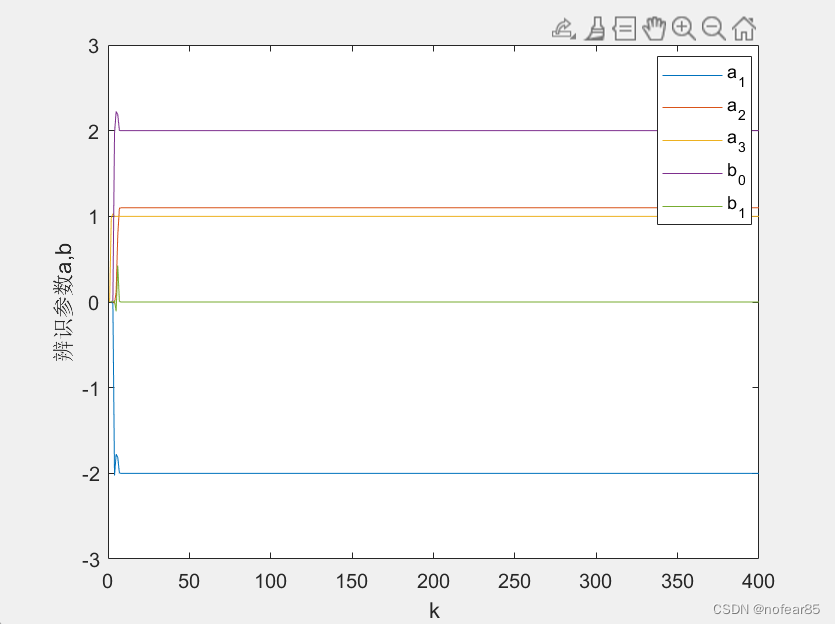
想要更好的结果,可以调参。



















 1229
1229

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











