







 超级会员免费看
超级会员免费看
 本文介绍了如何设置华中数控系统HNC-848Di与高创伺服驱动器CDHD2-0062AEC2之间的EtherCat通讯。内容包括硬件接线、参数设置、电子齿轮比调整、 EtherCat配置工具的使用以及如何解决通讯失败问题。在成功配置后,可以通过华数系统控制伺服驱动器进行精确运动。
本文介绍了如何设置华中数控系统HNC-848Di与高创伺服驱动器CDHD2-0062AEC2之间的EtherCat通讯。内容包括硬件接线、参数设置、电子齿轮比调整、 EtherCat配置工具的使用以及如何解决通讯失败问题。在成功配置后,可以通过华数系统控制伺服驱动器进行精确运动。
有个项目,使用华中数控的系统,通过ethercat,来控制高创的伺服驱动,科尔摩根的直驱电机,运动。
华数系统:
系统型号:HNC-848Di
系统版本:2.41.00——50871
高创驱动器:
型号:CDHD2-0062AEC2
固件版本:2.16.9
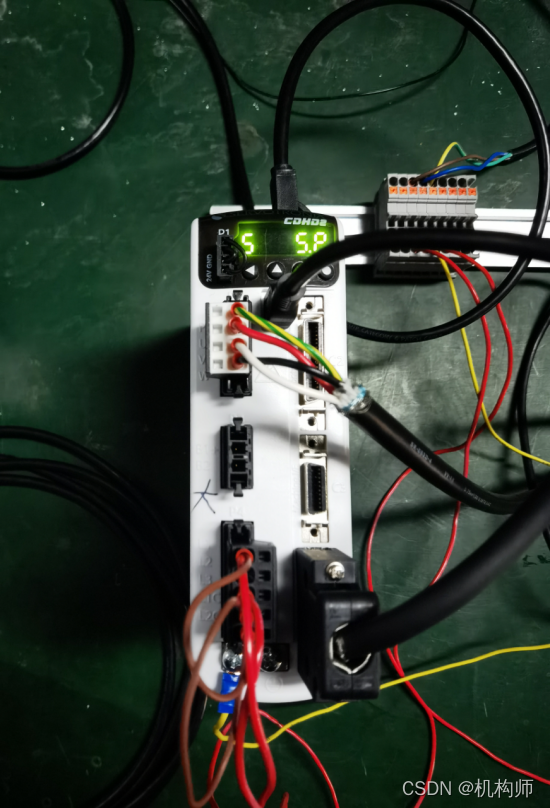
硬件接线:
参数设置:
本例中,使用的是正弦编码器,为128线,在驱动器端进行插值分频,插值设为15,编码器反馈脉冲数为4194304.
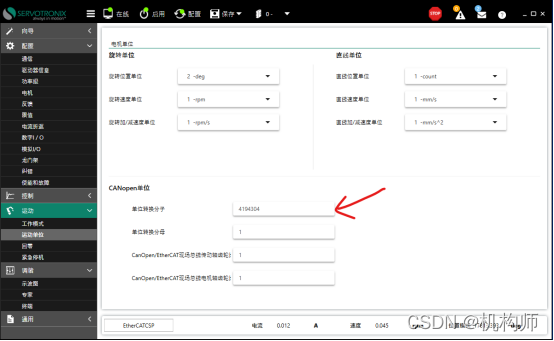
华数系统端参数需要和驱动器设置为一致:
电子齿轮比分母
有个项目,使用华中数控的系统,通过ethercat,来控制高创的伺服驱动,科尔摩根的直驱电机,运动。
华数系统:
系统型号:HNC-848Di
系统版本:2.41.00——50871
高创驱动器:
型号:CDHD2-0062AEC2
固件版本:2.16.9
硬件接线:
参数设置:
本例中,使用的是正弦编码器,为128线,在驱动器端进行插值分频,插值设为15,编码器反馈脉冲数为4194304.
华数系统端参数需要和驱动器设置为一致:
电子齿轮比分母
 2938
2938

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





 订阅专栏 解锁全文
订阅专栏 解锁全文


























