







目录
<<<<<项目环境建议:纯Linux或双系统的Linux环境,慎用虚拟机的Linux环境>>>>>
《项目简介》
进入 full tutorial for SO-100,按照流程操作

《环境配置》
git clone https://github.com/huggingface/lerobot.git ~/lerobotconda create -y -n lerobot python=3.10conda activate lerobotcd lerobot && pip install -e ".[feetech]"conda install -y -c conda-forge ffmpeg
pip uninstall -y opencv-python
conda install -y -c conda-forge "opencv>=4.10.0"注:项目更新后,原项目会报错缺少lerobot的模块,需重新更新环境
cd lerobot && pip install -e .sudo apt-get install git-lfs
git lfs install一、B站视频参考(推荐)
强力推荐UP主:黑狗木
二、安装飞特舵机的依赖项
cd /lerobotpip install -e ".[feetech]"三、配置舵机(主动臂)
1、查找与手臂关联的USB端口
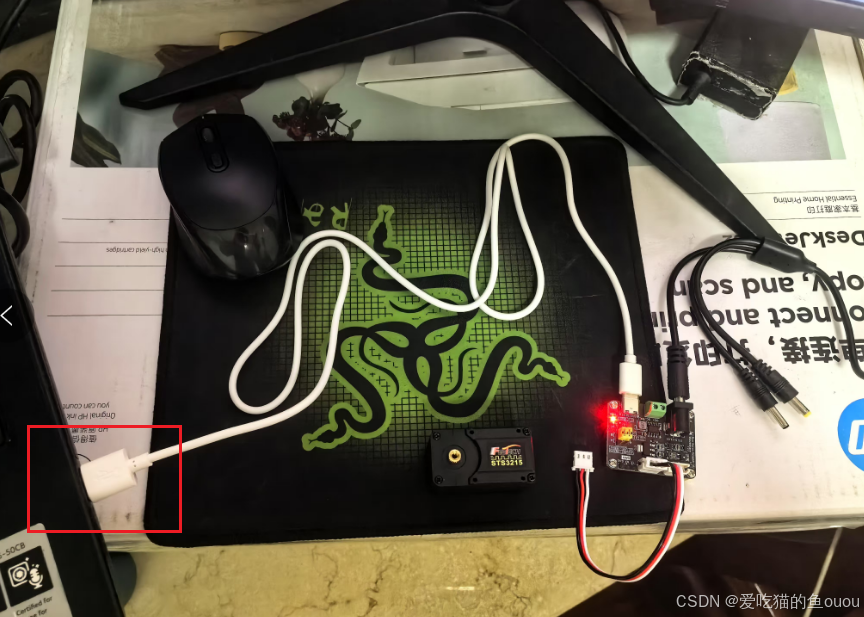
首先插上主臂开发板的usb,运行以下代码,得到
python lerobot/scripts/find_motors_bus_port.py
然后拔掉主臂开发板的usb,按回车,得到
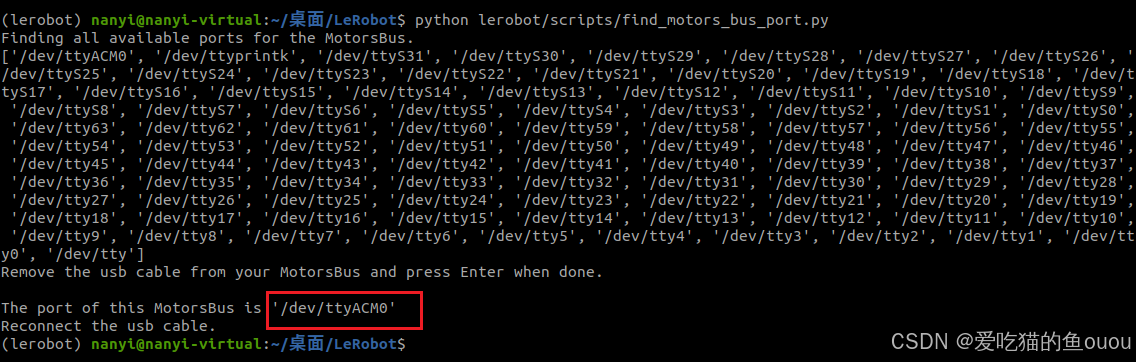
最后插回主臂开发板的usb,为后续做准备
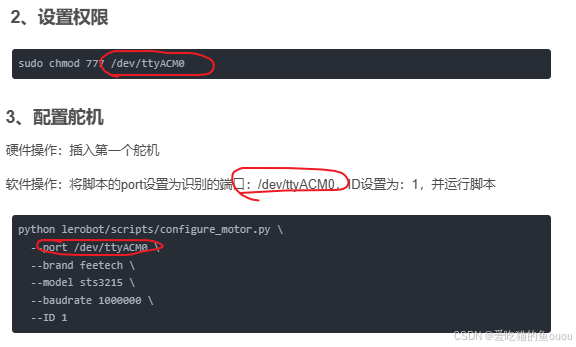
2、设置权限
sudo chmod 777 /dev/ttyACM03、配置舵机
硬件操作:插入第一个舵机
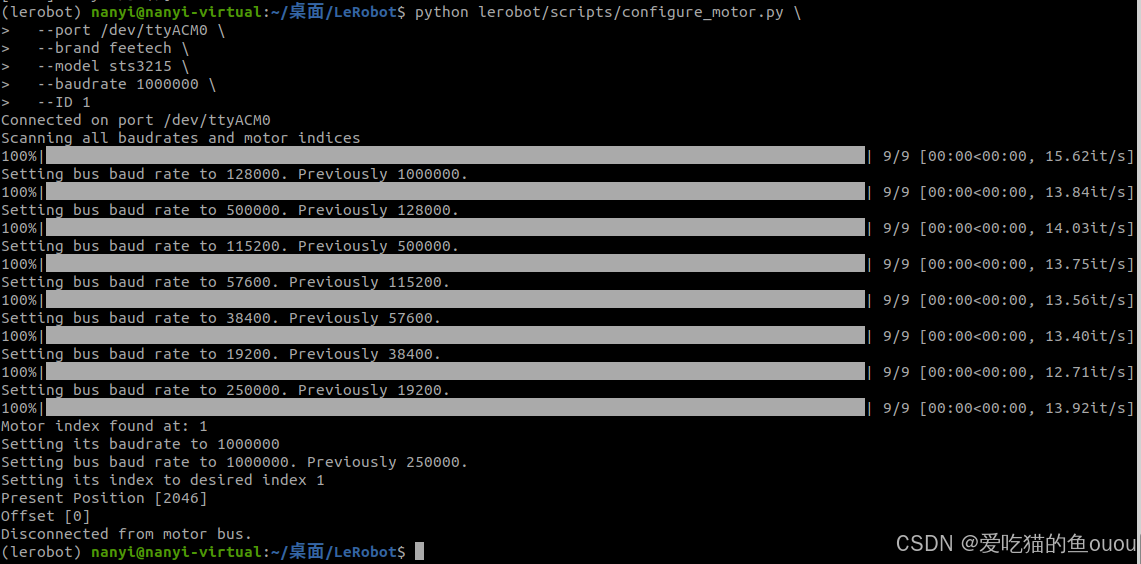
软件操作:将脚本的port设置为识别的端口:/dev/ttyACM0,ID设置为:1,并运行脚本
python lerobot/scripts/configure_motor.py \
--port /dev/ttyACM0 \
--brand feetech \
--model sts3215 \
--baudrate 1000000 \
--ID 1硬件结果:舵机会旋转
软件结果:如下
硬件操作:拔掉第一个舵机,接着依次插上后续的舵机
软件操作:将脚本的ID设置依次改为2-6,并运行脚本
python lerobot/scripts/configure_motor.py \
--port /dev/ttyACM0 \
--brand feetech \
--model sts3215 \
--baudrate 1000000 \
--ID 2python lerobot/scripts/configure_motor.py \
--port /dev/ttyACM0 \
--brand feetech \
--model sts3215 \
--baudrate 1000000 \
--ID 3python lerobot/scripts/configure_motor.py \
--port /dev/ttyACM0 \
--brand feetech \
--model sts3215 \
--baudrate 1000000 \
--ID 4python lerobot/scripts/configure_motor.py \
--port /dev/ttyACM0 \
--brand feetech \
--model sts3215 \
--baudrate 1000000 \
--ID 5python lerobot/scripts/configure_motor.py \
--port /dev/ttyACM0 \
--brand feetech \
--model sts3215 \
--baudrate 1000000 \
--ID 6四、配置舵机(从动臂)
1、查找与手臂关联的USB端口
首先插上从臂开发板的usb,运行以下代码,得到
python lerobot/scripts/find_motors_bus_port.py
然后拔掉从臂开发板的usb,按回车,得到
最后插回从臂开发板的usb,为后续做准备
2、设置权限、配置舵机
这里两个手臂开发板的USB端口号都相同,都是/dev/ttyACM0,指令、操作同上
注:如果端口号不同,注意修改指令,操作也是同上
五、取出主臂舵机齿轮
把主臂的6个舵机拆开,取出齿轮


















 2904
2904

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









