







题目:假设你在设计一个陪伴机器人系统,你需要建立一个陪伴机器人对象在识别你的不同心情时,切换不同的状态,运行不同模式陪伴主人。
一、状态图概述
在设计陪伴机器人时,理解并响应主人的情绪状态是提升用户体验的关键。状态图在此扮演着至关重要的角色,它帮助我们可视化机器人如何根据主人的情绪变化来调整其行为模式。通过UML状态图,我们可以详细规划机器人在不同情绪状态下的行为,从而实现更加个性化和贴心的陪伴。
二、状态图绘画分析
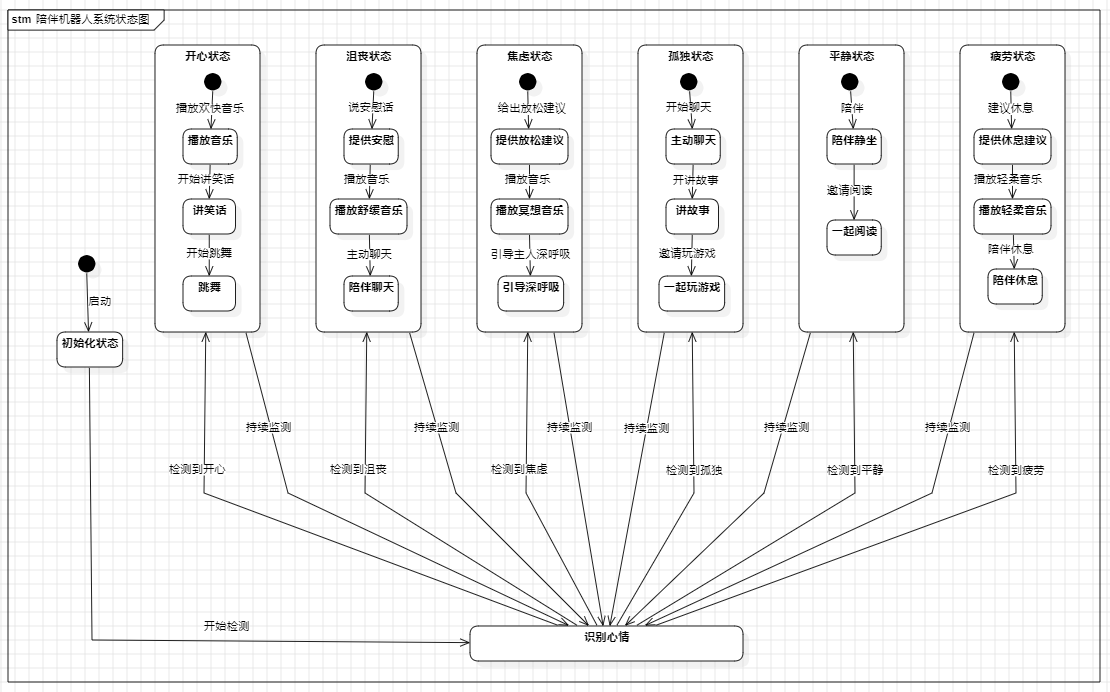
根据提供的陪伴机器人心情识别系统状态图,我们可以分析出以下关键状态和转换:
-
初始化状态:机器人启动并准备识别情绪。
-
识别心情:机器人通过传感器或语音识别技术检测主人的情绪。
-
情绪状态:
-
开心状态:播放欢快音乐、讲笑话、跳舞。
-
沮丧状态:播放舒缓音乐、提供安慰、主动聊天。
-
焦虑状态:提供放松建议、播放冥想音乐、引导深呼吸。
-
孤独状态:主动聊天、讲故事、邀请玩游戏。
-
平静状态:陪伴静坐、一起阅读。
-
疲劳状态:建议休息、提供休息建议、播放轻柔音乐。
-
状态转换触发器和动作包括:
-
检测到开心:从“识别心情”到“开心状态”。
-
检测到沮丧:从“识别心情”到“沮丧状态”。
-
持续监测:在每个情绪状态下,机器人持续监测主人的情绪变化。
三、状态图绘画与PlantUML代码实现
下面是用PlantUML绘制陪伴机器人心情识别系统状态图的代码示例:
@startuml
state "陪伴机器人系统" as CompanionRobot {
[*] --> 初始化: 启动
初始化 --> 识别心情: 开始监测
识别心情 --> 开心模式: 检测到开心
识别心情 --> 沮丧模式: 检测到沮丧
识别心情 --> 焦虑模式: 检测到焦虑
识别心情 --> 孤独模式: 检测到孤独
识别心情 --> 平静模式: 检测到平静
识别心情 --> 疲劳模式: 检测到疲劳
开心模式 --> 识别心情: 持续监测
沮丧模式 --> 识别心情: 持续监测
焦虑模式 --> 识别心情: 持续监测
孤独模式 --> 识别心情: 持续监测
平静模式 --> 识别心情: 持续监测
疲劳模式 --> 识别心情: 持续监测
state "开心模式" as HappyMode {
[*] --> 播放音乐: 播放欢快音乐
播放音乐 --> 讲笑话: 开讲笑话
讲笑话 --> 跳舞: 开始跳舞
跳舞 --> 识别心情: 持续监测
}
state "沮丧模式" as SadMode {
[*] --> 提供安慰: 说安慰话
提供安慰 --> 播放舒缓音乐: 播放舒缓音乐
播放舒缓音乐 --> 陪伴聊天: 主动聊天
陪伴聊天 --> 识别心情: 持续监测
}
state "焦虑模式" as AnxiousMode {
[*] --> 提供放松建议: 给出放松建议
提供放松建议 --> 播放冥想音乐: 播放冥想音乐
播放冥想音乐 --> 引导深呼吸: 引导主人深呼吸
引导深呼吸 --> 识别心情: 持续监测
}
state "孤独模式" as LonelyMode {
[*] --> 主动聊天: 开始聊天
主动聊天 --> 讲故事: 开讲故事
讲故事 --> 一起玩游戏: 邀请玩游戏
一起玩游戏 --> 识别心情: 持续监测
}
state "平静模式" as CalmMode {
[*] --> 陪伴静坐: 陪伴静坐
陪伴静坐 --> 一起阅读: 邀请阅读
一起阅读 --> 识别心情: 持续监测
}
state "疲劳模式" as TiredMode {
[*] --> 提供休息建议: 建议休息
提供休息建议 --> 播放轻柔音乐: 播放轻柔音乐
播放轻柔音乐 --> 陪伴休息: 陪伴休息
陪伴休息 --> 识别心情: 持续监测
}
}
@enduml代码解析:
-
使用
[*]表示状态图的起始点。 -
使用
-->表示状态之间的转换,并在转换旁边标注触发转换的条件。 -
每个状态用一个圆角矩形表示,状态名称写在矩形内。
-
在状态内,使用描述性文字表示在该状态下机器人的行为。
四、状态图的关键点
通过分析这个陪伴机器人心情识别系统的状态图,我们可以总结出以下几个关键点:
-
情绪识别的准确性:状态图展示了机器人如何通过持续监测来准确识别和响应主人的情绪变化。
-
行为的多样性:每个情绪状态下,机器人都有一系列不同的行为模式,以适应主人的需求。
-
状态的可扩展性:此图可以轻松扩展更多情绪状态和行为模式,如添加“兴奋”状态等。
-
用户体验的优化:状态转换逻辑合理,旨在提供更加个性化和贴心的陪伴体验。
五、总结
陪伴机器人系统的设计需要深入理解用户的情绪需求,并据此提供相应的陪伴模式。通过UML状态图的分析,我们可以清晰地规划机器人在不同情绪状态下的行为,从而实现更加智能化和人性化的陪伴。
绘制状态图时需要注意:
-
明确对象的状态和它们之间的转换。
-
合理标注状态转换的触发事件。
-
保持图表简洁的同时不丢失关键信息。
PlantUML作为一种文本化绘图工具,非常适合快速绘制和修改这类UML图,便于版本控制和团队协作。通过代码生成的图表也具有良好的一致性和可维护性。
理解这样的状态图不仅有助于系统设计,对于后续的编码实现和系统维护都有重要指导意义。希望本文对您理解UML状态图及其应用有所帮助,同时也为您在设计陪伴机器人时提供一些新奇的思路和灵感!

















 6128
6128

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









