







一、电机的控制方式
1.脉冲+方向
转载自https://blog.csdn.net/phcdd/article/details/117655161
所谓指令脉冲+方向控制模式,就是由一路PWM波控制电机转动,一个IO控制电机方向。
计算方法如下:
电机转动一圈所需脉冲数=电机驱动内置编码器线数4/电子齿轮数
4为编码器对AB相计数模式 若仅对AB相上升沿或者下降沿计数则取2 若对AB相上升沿和下降沿都计数则取4 电子齿轮即为电机驱动对脉冲的细分数,使控制更加精确
伺服电机编码器为2500线 驱动细分为4:1 ,
则一圈脉冲数=2500*4/4=2500,
指令脉冲频率=(需要电机运行的转速 r/min/60)一圈的脉冲数
一圈所需脉冲数为2500 则一个脉冲转动1/2500圈 设电机转动一圈移动距离为C,则一个脉冲移动C/2500 所以通过对脉冲计数可以实现非常精确的位置控制。
http://bbs.gongkong.com/d/201104/375739/375739_1.shtml
基于脉冲加方向的控制模式最早是针对步进电机而来的。一个脉冲移动一步。然而,对于驱动器工作在位置方式的伺服系统也可以使用脉冲加方向控制模式。这种情况下,我们通常称为开环控制,因为控制系统只做轨迹规划而不做闭环。所产生的轨迹完全来源于理论,实际的运动效果则完全起决于驱动器位置环的控制效果。这类型的控制方式一般用于对运动精度要求不高的场合。常见的应用主要是点位运动。而对于需要实时插补走轨迹的应用则控制效果很差,如雕铣机、磨床、各类型的切割机等。造成实时插补位置误差的主要原因是加工速度和脉冲的分辨率。伴随着加工精度的不断提高,脉冲精度即步距变得越来越小,而随着加工速度的不断提高,单位时间内输出的脉冲频率不断提高会导致驱动器侧的计数器对于噪声的免疫能力大幅降低,从而出现所谓的丢脉冲的结果,这种问题在步进电机中极其常见,主要发生在高速运行的情况下。对于高速高精度的伺服电机, 如果使用脉冲加方向时,这种情况也同样会发生。另外,由于脉冲精度的有限性,脉冲加方向的加工精度也大大受限。比如,同样是加工一个曲面,使用脉冲家方向控制模式与采用模拟或直接PWM控制模式加工的结果虽然形状一样,但表面光洁度相差甚大。使用模拟或直接PWM驱动模式可以实现镜面加工,而使用脉冲加方向的零件则需要进一步的抛光处理。当然基于脉冲加方向的控制模式高于模拟量模式的性能主要体现在其全数字的特点,也就是说,只要不是高速高精度的场合,其对环境噪声的免疫能力比模拟控制模式高出很多。然而,其对噪声的灵敏度远大于全数字PWM控制模式。(待续)
2.脉宽调制
PWM的占空比控制电机转速,PWM的脉冲数控制电机的转动距离。
脉宽调制控制电路,是利用半导体功率晶体管或晶闸管等开关器件的导通和关断,把直流电压变成电压脉冲列,控制电压脉冲的宽度或周期以达到变压的目的,或者控制电压脉冲宽度和脉冲列的周期以达到变压变频目的的一种变换电路。
基本的脉宽调制控制电路包括电压-脉宽转换器和开关式功率放大器两部分,参考电路如下图所示。
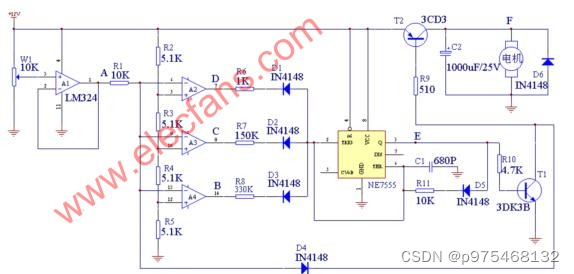
此电路是通过改变占空比的方法,来调节直流电动机的转速。输入部分是一个简单的电位器调节电位电路,用以调整电压,电源电压采用12V。可调电压经电压跟随器A1以后,在比较器A2 ~ A4上与三个事先经电阻分压而设定的基准电压相比较。随着输入电压的升高,从A4开始,然后是A3、A2,它们输出先后变低电平。
http://bbs.gongkong.com/d/201104/375739/375739_1.shtml
基于全数字直接PWM驱动技术是90年代初期有美国泰道公司提出彻底解决以上驱动模式所有弊病从而可以实现最优控制性能的控制模式。这种驱动模式,集电流环、速度环和位置环于一体,彻底解决时钟同步性问题,延迟最优化问题,噪声免疫性问题、配套电机灵活性问题、系统控制精度问题。
3.模拟量控制
https://zhuanlan.zhihu.com/p/448415200
既然是速度模式,那肯定需要设置模拟量对应的速度,模拟量控制方式1 ,默认0V对应速度为0,我们需要设置模拟量10V对应速度值,这里我们设置为3000rpm,用过模拟量的小伙伴都知道,模拟量使用的时候,和对应的参数值,是呈线性变化的,如下图所示:
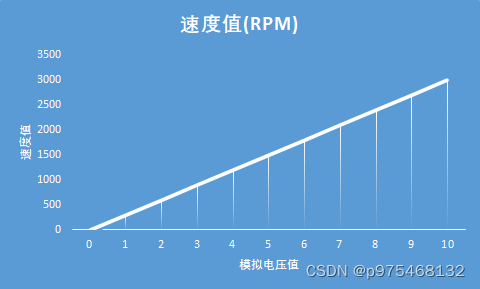
模拟电压值对应着电机的转速
基于模拟量的控制方式,随着驱动器工作方式的不同,可以分为模拟速度方式或模拟转矩方式。如上文所述,模拟方式区别于脉冲加方向模式,是一种对于控制器而言的闭环控制方式。如果驱动器工作在速度方式,则控制器闭位置环,而如果驱动器工作在转矩方式时,控制器闭速度和位置环。那么,两种模拟驱动方式有什么不同吗?不同之处主要在于以下几点:
http://bbs.gongkong.com/d/201104/375739/375739_1.shtml
1、参数调整的简易性不同。对于模拟速度方式,系统的参数调整必须在两套系统中完成,控制器和驱动器,这就造成了许多现场调参数的负担。尤其对于驱动器与控制器距离较远的大型设备,往返于控制器与驱动器参数调整的工作量是非常大的。通常这类型的参数调整需要及其漫长的时间。
2、参数的最优性不同。对于绝大多数的运动控制系统而言,基于刚体对象模型的PID或类PID(如PPI,PIV, PDF, PDFF等)控制算法被普遍使用。要想实现理论意义上的最优控制,无论速度环还是位置环都不能调到最优,否则全局肯定不会是最优。一定是大家都有所让步,全局才能最优。对于模拟速度模式,由于速度环和位置环分别在驱动器和控制器内,速度环参数调整到什么程度才是最优没有办法确定,只有当调好一组参数后,在回到控制器侧再调整位置环,如果位置环条不好,在重新调速度环,如此多次迭代调试才能调好。而对于模拟转矩模式,由于所有参数调整都在控制器内,其参数调整一般只需要十几分钟即可。对于复杂的模拟速度模式,通常想要调好一组参数花掉几个星期是很常见的。当然如果调参数的工程师对于对象特性十分了解且对于控制手段极其了解,在几天内调整好也是有可能的。
3、系统响应的实时性不同。通常控制器与驱动器的内部时钟是不同步的。而对于当采样不同步时,根据正态分布的原理,系统的传输延迟可以定义为采样周期的1/2。对于模拟速度模式,假如说在控制器伺服时钟的上升沿,位置环控制输出,即速度环指令输出,由于控制器位置环时钟与驱动器速度环时钟的不同步性,平均而言,速度环指令的延迟是驱动器速度环采样时钟的1/2。通常速度环采样频率为5Khz, 因此,由于速度环与位置环不在同一个采样系统内,造成了100usec的传输延迟,极大地降低了系统的稳定余度,大大降低了系统的闭环带宽和响应速度。
4、对于环境噪声的免疫程度不同。通常模拟速度模式对系统的零漂、温漂、偏移量、扰动和噪声的灵敏度较模拟转矩方式要大。(具体分析略)
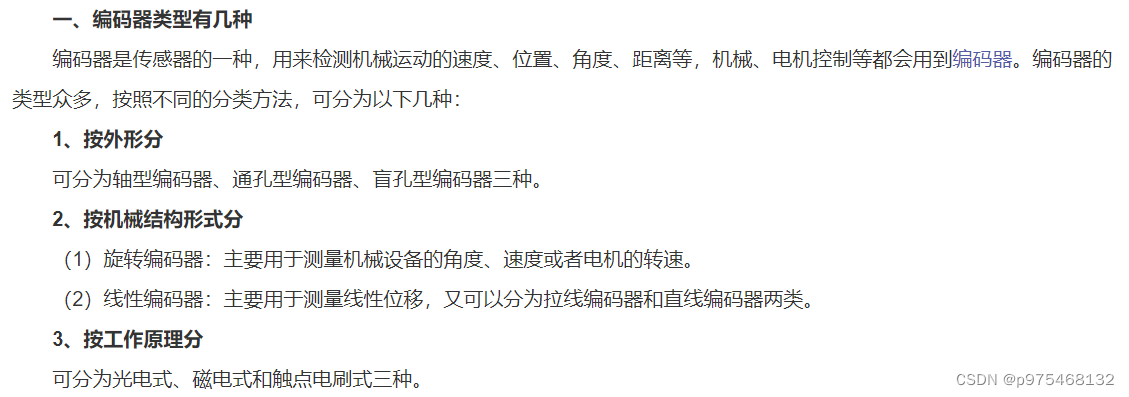
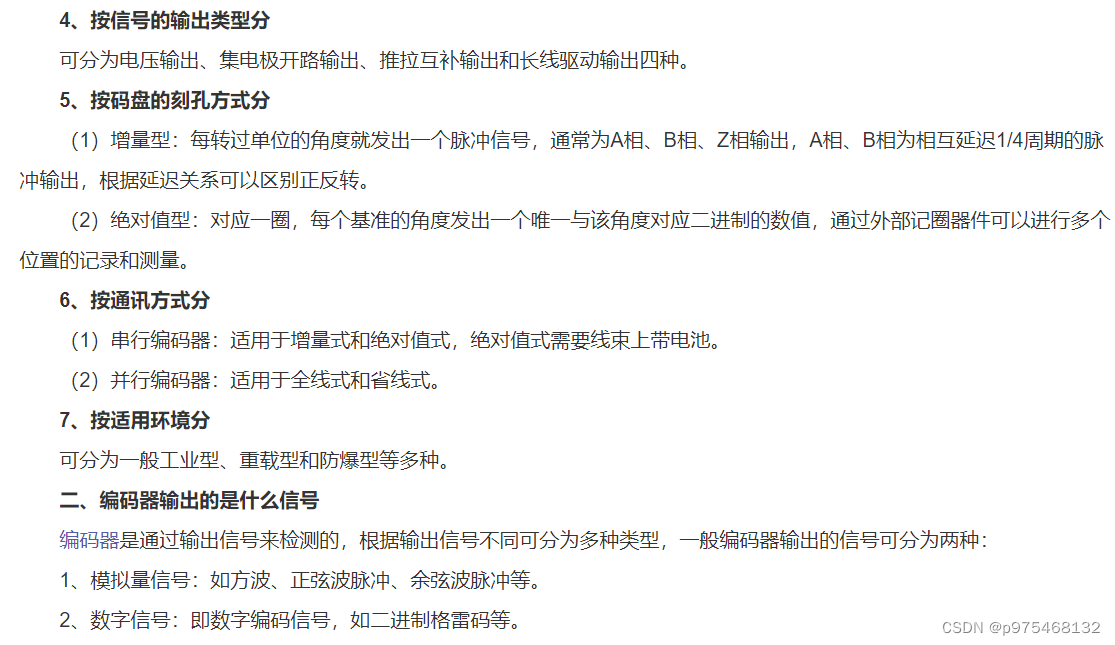
二、编码器的分类
编码器种类
有几种不同的方式可以对运动控制应用中的编码器种类进行分类。最常见的方法是通过被监控的运动类型来区分这些设备,无论是线性(直线)还是旋转。三种最常见的编码器种类是线性编码器、旋转编码器和角度编码器。
编码器种类一:线性编码器
线性编码器处理物体沿路径或直线的移动,例如在前面提到的定长切割应用中。这种类型的编码器使用传感器来测量两点之间的移动或距离,有时使用电缆(更长的距离)或小杆(更短的距离)。在这些情况下,在编码器换能器和移动物体之间铺设电缆。当物体移动时,传感器从电缆收集数据并产生模拟或数字输出信号,用于确定物体的移动或位置。
编码器种类二:旋转编码器
旋转编码器用于提供有关旋转物体或设备(例如电机轴)运动的反馈。旋转编码器将运动轴的角位置转换为模拟或数字输出信号,然后使控制系统能够确定轴的位置或速度。
旋转编码器可以包含轴,也可以是称为通孔编码器的设计,这意味着它们能够直接安装在旋转轴(例如电机的轴)的顶部。通孔编码器有多种尺寸可供选择,并具有夹具或固定螺钉安装选项,使其适用于机器设计应用中的附件。法兰用于定位编码器并防止其与移动轴一起旋转。
编码器种类三:角度编码器
角度编码器与旋转编码器相似,因为它们监视并提供旋转运动的反馈,但它们的不同之处在于角度编码器倾向于提供更高的精度测量。
编码器种类四:绝对式和增量编码器
线性和旋转编码器种类又可以分为绝对式或增量编码器,使用绝对式编码器,设备生成的输出信号会产生一组独特的数字位,这些位对应于被测物体的特定位置。即使断电,绝对式编码器的设计也可以确定物体的位置,因为每个位置都有一个特定的数字信号。
旋转绝对编码器种类可用于单圈和多圈设计。单圈编码器能够在任何一个轴旋转内提供信息。多圈编码器能够提供关于轴位置多次旋转甚至大量旋转的位置信息。
绝对式编码器用于需要知道物体准确位置的应用中。它们还用于机器或过程在很长一段时间内处于非活动状态或以非常慢的速度移动的情况。
增量编码器使用一种更简单的运动计数方法,并依靠通过计算脉冲数来确定物体的位置,然后使用该计数来计算位置。因为它们依赖于脉冲计数,所以没有可用于确定绝对位置的唯一数字签名。因此,在断电的情况下,增量编码器必须以原始位置或参考点为参考,以便可以重置计数器,然后用于计算相对运动。考虑差异的一种方法是增量编码器测量相对于某个参考点的相对运动,而绝对编码器使用直接反映位置的唯一信号代码直接测量位置。
三、运动控制卡简介
引自文献:基于PMAC控制卡的上位机软件系统的研究与设计
运动控制卡的组成架构可以分成三种:
1.接口形式以工控及为主的运动控制卡
2.软件型运动控制卡
3.嵌入工控机的运动控制卡
国内运动控制卡的典型厂家有台湾的台达、凌华等,大陆的主要是故高科技有限公司的GE系列控制卡。
如果按照运动控制的架构划分主要包括板卡级产品、系统级产品和现场总线产品。

















 5904
5904

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









