







 本文详细介绍了如何在TwinCAT 3中配置台达A2伺服驱动器,涉及编码器设置、扭矩读取以及A2伺服参数设置的步骤,包括P1-01控制模式、CanOpen参数和电动缸/旋转电机设置,还提供了A2伺服参数设置的实例和注意事项。
本文详细介绍了如何在TwinCAT 3中配置台达A2伺服驱动器,涉及编码器设置、扭矩读取以及A2伺服参数设置的步骤,包括P1-01控制模式、CanOpen参数和电动缸/旋转电机设置,还提供了A2伺服参数设置的实例和注意事项。
1、XML文件添加、IO扫描伺服和变量定义关联,参照博客TwinCAT3第三方伺服电机——汇川IS620N使用 中所讲解的方法,TC3使用第三方伺服方法都是一样的。本篇文章只讲解台达伺服部分。
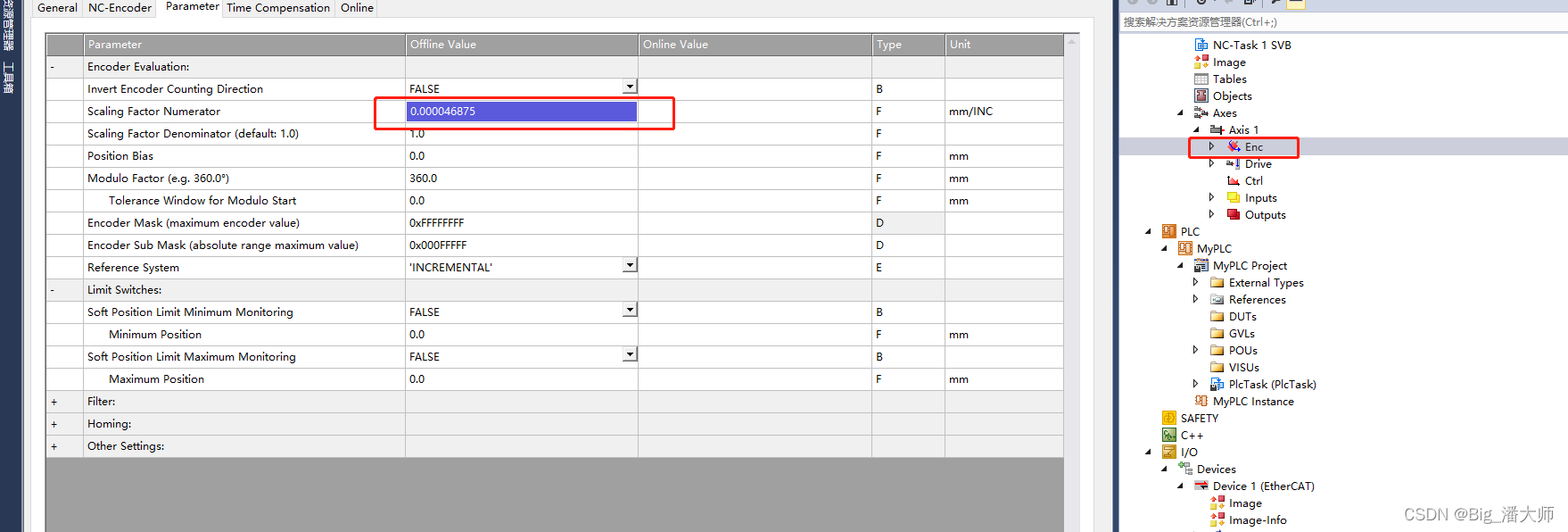
编码器说明
编码器设置:一秒钟转一圈
A2伺服编码器:1280000线
TC3中设置:(1/1280000)*60 0.000046875
A3伺服编码器:16777216线
TC3中设置:(1/16777216)*60 0.0000035762786865
2、A2伺服扭矩读取


A2相关资料:台达A2伺服相关.rar-制造文档类资源-CSDN下载
A2伺服参数设置举例说明:(石家庄飞翔)
旋转:400W 40欧 电动缸:1000W 40欧
1、驱动器需要设置的参数:
P1-01: 控制模式:电动缸电机设为0C。旋转电机:1#厅和3#厅-0C(CW) 2#厅和4#厅10C(CCW)
P3-12: CanOpen参数支持设定。设为100,参数重新上电或者通讯重置后,不会修改参数值。
P1-52: 制动电阻阻值
P1-53: 制动电阻功率
P2-18: 数字量输出通道0,可以设置为抱闸线,改为0x0108,其余的P2-10~P2-22均需要改为0x100不作用,或者根据实际需要设置为其它的。
P1-01: 需要使用EtherCAT控制时改为0x000C,需要用ASDA软件点动的时候改为0x0002。
P2-69: 编码器类型,0相对,1绝对(需关电重启,再改P2-08跟P2-71) 绝对型编码器位置设为0,并初始化:先设置p2-08=271,再设置p2-71=1,然后断电重启。
如果电机使能之后停着不动有嗡嗡的电流声,修改参数
P2-25:值范围5-7,都试一下。
重置台达驱动器参数:p2-08=10,然后断电重启即可
备注1:P1-01:控制模式。1#厅、3#厅移门电机10C,2#厅、4#厅旋转电机10C。别的都是0C。
备注2:1#厅,两个电动缸刹车改P2-19(原DO点晶闸管坏)


















 4624
4624

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











