






摘要
本文提出了一个即时定位与建图系统,该系统支持单目,双目,RGB-D输入,作者将其命名为ORB-SLAM2。该系统可以再常规CPU上进行实时运行,不论是手持设备采集的室内场景,还是无人机俯拍亦或是车辆驾驶场景。本文基于集线约束设计的后端处理可以估计精确的包含尺度的轨迹。作者在29个常用的视频序列上进行了实验,都取得了SOTA的效果。
引言
作者提出slam是近几年的研究热点,且由于相机造价较低所以视觉slam是主要的slam解决方案。本文主要提出了双目和RGB-D输出进行视觉slam,来解决单目slam存在的问题。贡献如下:
- 提出ORB-SLAM2
- RGB-D结果显示本文达到了SOTA
- stereo也是SOTA
- 一个轻量化的定位模式,可以有效进行地图重用。
相关工作
略
方法评估
主要在三个常用数据集上进行了测试,实验平台为Intel Core i7-4790,16GBRAM,由于多线程的不确定性,实验将每个序列运行了五次,取中值来估计轨迹。
A KITTI数据集
车载摄像头拍摄,市区和高速场景,54cm双目摄像机基线10Hz频率,分辨率1240
×
\times
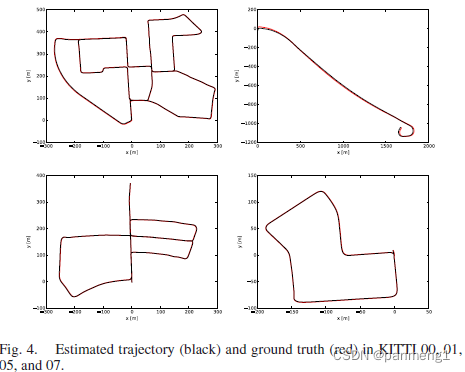
× 376。序列00,02,05,06,
07,09包含闭环。ORB-SLAM检测了所有的闭环,但是09序列没有成功,因为其闭环发生在末尾的极少数帧中。
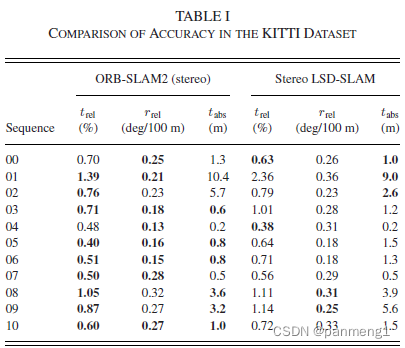
使用了两个评价指标,RMSE和
t
r
e
l
,
r
r
e
l
t_{rel},r_{rel}
trel,rrel
B. EuRoC Dataset
包含11个搭载在小型无人机的摄像机采集的双目序列,双目摄像机基线11cm。序列根据无人机的速度,光照和场景纹理等信息被分为简单中等困难三个等级。
C. TUM RGB-D Dataset
室内采集的RGB-D序列,根据不同纹理光照结构条件进行分组。















 6678
6678











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









