






一 概述
数字量IO,属于机器人指令中最直观的外设控制指令了,主要包含两个,一个输入一个输出;队列缓冲指令配合之前的S09使用,在本文章中介绍。
二 数字量操作指令
2.1 数字量输出 P01
例如,工业卡上有24路光耦隔离的数字量输出,那么可以采用P01 3 1来使得第三路输出为高电平,不仅如此,工业卡的输出是经过放大的,可以直接驱动24V继电器。
2.2 数字量输入I01
数字量输入采用状态字的形式来反馈24路数字量输入,分为3个Bytes,每个Bytes表示8个输入,例如,返回为0xFFF表示24路高电平。
三 队列缓冲指令
使用这个指令之前,需要首先切换缓冲模式,使用S09来确认
3.1 切换缓冲模式
发送S09一次,板卡反馈数据
exec_S09 cmd_buff_mode = 1
cmd_buff_mode为1的时候,表示处于缓冲模式,可以多个运动指令连续发送
3.2 清空队列
发送E01,板卡反馈exec_E01
3.3 发送各类运动指令
M02 5000 0 0 0 0 0
M07 -5000 0 0 0 -5000 0
M02 2500 0 0 0 0 0
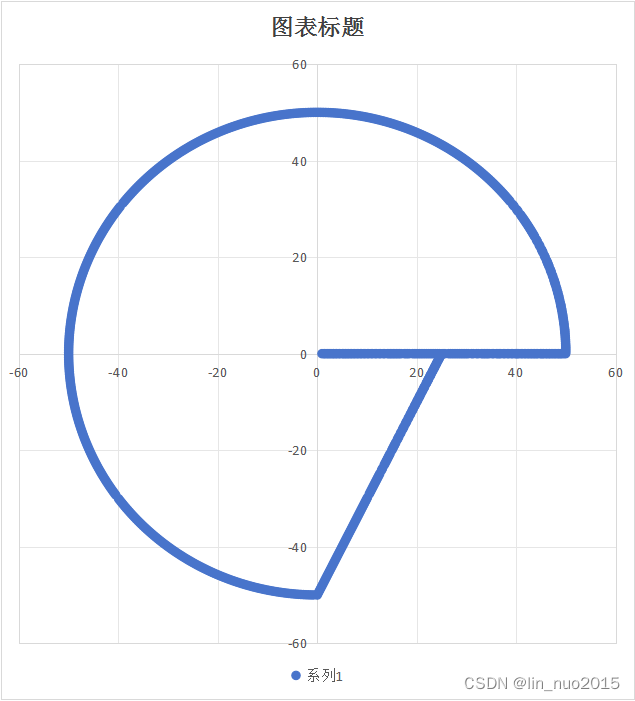
3.4 执行队列
发送E02
整个过程的执行结果如图所示















 351
351

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









