







这是我在上《机器人原理与应用》课程的时候所作的课程设计,其中用到了Robotics Toolbox for MATLAB,当然在运行下面的界面的时候也是需要安装这个工具箱的。如果没有这个工具箱可以在后面的网址下载这个工具箱和源程序。
下面是运行初始时的状态:
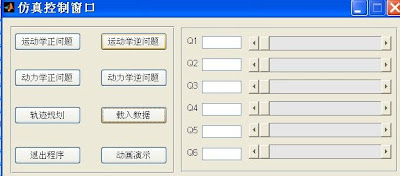
从上面也能看出,这个仿真系统能仿真运动学的正问题和逆问题,以及动力学的正逆问题和轨迹规划。Q1-Q6为PUMA560的六个自由度的值,都是角度。
可以从这里下载源程序和Robotics Toolbox for MATLAB:
http://groups.google.com/group/tim-files/files?upload=1 名称为:puma560.rar(源程序) robot.rar(机器人工具箱)
下面是更多的相关图片:
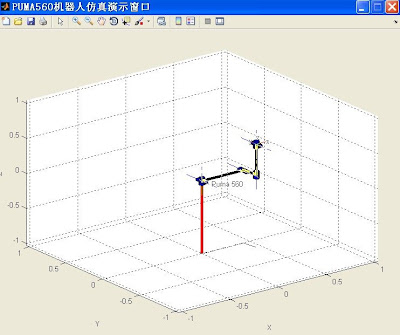
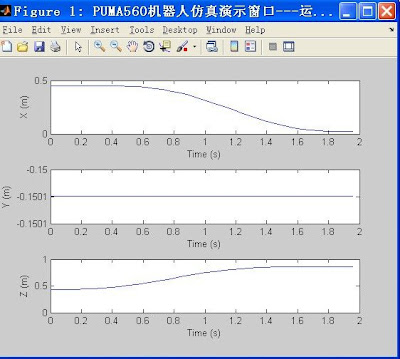
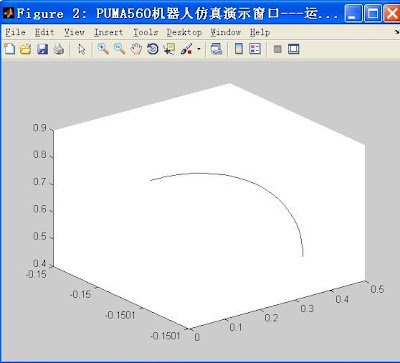
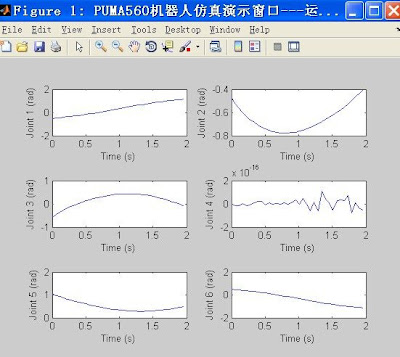
运动学正问题:
运动学逆问题:
其他的就不再一一列举,有兴趣下载程序运行下。
注意:最好在MATLAB2008a上运行,最低要在MATLAB7.0上运行















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









