







 本文详细阐述了Savitzky-Golay滤波器的工作原理,涉及滤波方法、滤波效果受窗口宽度和多项式阶次的影响,以及其在平滑去噪和光谱分析中的应用。特别强调了在信号边缘采样值处理中的注意事项和边缘处理技巧。
本文详细阐述了Savitzky-Golay滤波器的工作原理,涉及滤波方法、滤波效果受窗口宽度和多项式阶次的影响,以及其在平滑去噪和光谱分析中的应用。特别强调了在信号边缘采样值处理中的注意事项和边缘处理技巧。
本文介绍Savitzky-Golay滤波器基本原理。
Savitzky-Golay滤波器(简称为S-G滤波器)被广泛地运用于数据平滑去噪,它是一种在时域内基于局域多项式最小二乘法拟合的滤波方法。这种滤波器最大的特点在于在滤除噪声的同时确保信号的形状,宽度不变。S-G滤波器滤波的效果和选取窗口宽度,多项式阶次有关。基于这种滤波器的特点,它在光谱分析(平滑滤波)中经常使用。
1.基本原理
S-G滤波器本质上属于FIR滤波器,我们知道设计FIR滤波器关键在于求得滤波器系数。对于S-G滤波器其系数即为多项式前的常系数,下面对其作简单推导。
设滤波器窗口宽度为L=2k+1,即以中心点s前后k个数据作为滤波器的窗口,多项式阶次为n。
则
进而,
H为范德蒙矩阵,经推导x的预测值
其中
1)B为与输入x无关的矩阵,也就是S-G滤波器系数
2)矩阵的行数由窗口宽度L决定,为L行
3)矩阵的列数由多项式阶次n决定,为n+1列
2.适用范围
S-G平滑滤波器通常用于“平滑”频率跨度(无噪声)较大的含噪信号。它们也被称为数字平滑多项式滤波器或最小二乘平滑滤波器。在某些应用中,S-G滤波器的性能优于标准平均值 FIR 滤波器,后者往往会将高频成分随噪声一起滤除。S-G滤波器在保留高频信号分量方面更为有效,但在抑制噪声方面不太成功。
S-G滤波器在对含噪数据帧进行多项式拟合时能够最小化最小二乘误差,从这个意义上而言,它们是最优的滤波器。
3.应用
1)滤波器系数求解
这里以窗口宽度为11,阶次为4为例。
在matlab中命令行输入:
order=4;
framelen=11;
v=-5:1:5;
A = fliplr(vander(v));
A=A(1:framelen,1:order+1);
B=A*inv(A'*A)*A';在matlab中有专门设计S-G滤波器的命令,这里我们对比一下2个值,在命令行输入:
order=4;
framelen=11;
b = sgolay(order,framelen);经过比较,这2个值是相等的。
注意:
a)矩阵B或b中间行向量(第6行)即为S-G滤波器的滤波器系数
b)矩阵B或b其他行在处理信号边缘(最左侧及最右侧)有用
2)信号边缘的采样值处理
a)采用sgolayfilt对信号进行处理
sgolayfilt是matlab内置的对输入信号进行S-G滤波的命令,这里以此为参考,对比信号边缘是否处理的差异。
order = 4;
framelen = 11;
lx = 36;
x = randn(lx,1);
sgf = sgolayfilt(x,order,framelen);
plot(x,':')
hold on
plot(sgf,'.-')
legend('signal','sgolay')
输出结果:

b)直接使用滤波器系数进行滤波
这里使输入信号和滤波器系数卷积(FIR)进行滤波。
m = (framelen-1)/2;
B = sgolay(order,framelen);
steady = conv(x,B(m+1,:),'same');
plot(steady)
legend('signal','sgolay','steady')输出结果:
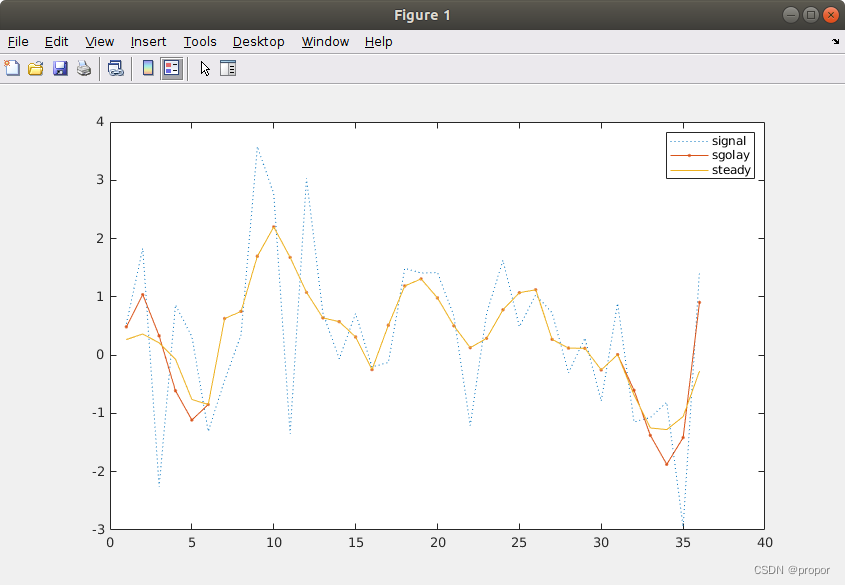
可见,直接使用滤波器系数进行滤波,在信号边缘滤波效果并不好,和matlab内置的滤波器命令也有差异。
c)对信号边缘进行处理
靠近信号边缘的采样无法放在对称窗的中心,必须区别对待。
为了确定启动瞬变,对 B 的前 (framelen-1)/2 行与信号的前 framelen 个采样执行矩阵乘法。
ybeg = B(1:m,:)*x(1:framelen);为了确定终止瞬变,对 B 的最后 (framelen-1)/2 行与信号的最后 framelen 个采样执行矩阵乘法。
yend = B(framelen-m+1:framelen,:)*x(lx-framelen+1:lx);将瞬变部分与稳态部分连接起来以生成完整信号。
cmplt = steady;
cmplt(1:m) = ybeg;
cmplt(lx-m+1:lx) = yend;
plot(cmplt)
legend('signal','sgolay','steady','complete')
hold off输出结果:

可见,经过信号边缘进行处理后,和sgolayfilt滤波后的曲线重合。
4.实现
采用Eigen库,可容易实现:
1)范德蒙矩阵生成及相关矩阵运算(主要求B)
2)卷积运算或FIR滤波
也可以使用matlab或其他工具生成滤波器系数,再使用FIR滤波器进行滤波器(注意信号边缘的处理)。这里就不做过多介绍。
本文介绍了Savitzky-Golay滤波器基本原理。


















 8699
8699

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









