







文章结构
相关组件
URDF(Unified Robot Description Format)——创建机器人模型
统一(标准化)机器人描述格式,可以以一种 XML 的方式描述机器人的部分结构,比如底盘、摄像头、激光雷达、机械臂以及不同关节的自由度,该文件可以被 C++ 内置的解释器转换成可视化的机器人模型,是 ROS 中实现机器人仿真的重要组件。
Gazebo——搭建仿真环境
一款3D动态模拟器,用于显示机器人模型并创建仿真环境,能够在复杂的室内和室外环境中准确有效地模拟机器人。与游戏引擎提供高保真度的视觉模拟类似,Gazebo提供高保真度的物理模拟,其提供一整套传感器模型,以及对用户和程序非常友好的交互方式。
Rviz(ROS Visualization Tool)——显示机器人各种传感器感知到的环境信息
ROS的三维可视化工具,主要目的是以三维方式显示ROS消息,可以将数据进行可视化表达。例如:可以显示机器人模型,可以无需编程就能表达激光测距仪(LRF)传感器中的传感器到障碍物的距离,RealSense、Kinect或Xtion等三维距离传感器的点云数据(PCD, Point Cloud Data),从相机获取的图像值等。
三者应用中,只是创建 URDF 意义不大,一般需要结合 Gazebo 或 Rviz 使用,在 Gazebo 或 Rviz 中可以将 URDF 文件解析为图形化的机器人模型,一般的使用组合为:
- 如果非仿真环境,那么使用 URDF 结合 Rviz 直接显示感知的真实环境信息
- 如果是仿真环境,那么需要使用 URDF 结合 Gazebo 搭建仿真环境,并结合 Rviz 显示感知的虚拟环境信息
URDF集成Rviz
URDF相关语法
robot
robot 标签是根标签,所有的 link 和 joint 以及其他标签都必须包含在 robot 标签内,在该标签内可以通过 name 属性设置机器人模型的名称。
属性:
- name:指定机器人模型的名称
子标签:
其他标签都是子级标签
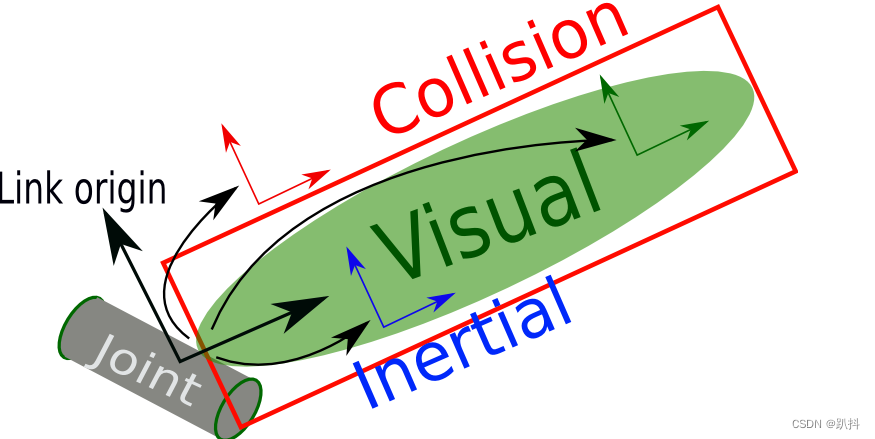
link
link 标签用于描述机器人某个部件(也即刚体部分)的外观和物理属性。比如: 机器人底座、轮子、激光雷达、摄像头…每一个部件都对应一个 link, 在 link 标签内,可以设计该部件的形状、尺寸、颜色、惯性矩阵、碰撞参数等一系列属性。该标签对应的数据在模型中是可见的。
属性:
- name:为连杆命名
子标签:
- visual:描述外观
-
geometry 设置连杆的形状
- box 盒状
属性:size=长(x) 宽(y) 高(z) - cylinder 圆柱
属性:radius=半径 length=高度 - sphere 球体
属性:radius=半径 - mesh 为连杆添加皮肤
属性: filename=资源路径(格式:package://packagename/path/文件)
- box 盒状
-
origin 设置偏移量与倾斜弧度
- xyz=x偏移 y偏移 z偏移
- rpy=x翻滚 y俯仰 z偏航 (右手系,单位是弧度)
-
metrial 设置材料属性(颜色)
- 属性: name
- 标签: color
- 属性: rgba=红绿蓝权重值与透明度 (每个权重值以及透明度取值[0,1])
-
- collision:连杆的碰撞属性(用于Gazebo)
- Inertial:连杆的惯性矩阵(用于Gazebo)
举例:
<link name="base_link">
<visual>
<!-- 形状 -->
<geometry>
<!-- 长方体的长宽高 -->
<!-- <box size="0.5 0.3 0.1" /> -->
<!-- 圆柱,半径和长度 -->
<!-- <cylinder radius="0.5" length="0.1" /> -->
<!-- 球体,半径-->
<!-- <sphere radius="0.3" /> -->
</geometry>
<!-- xyz坐标 rpy翻滚俯仰与偏航角度(3.14=180度 1.57=90度) -->
<origin xyz="0 0 0" rpy="0 0 0" />
<!-- 颜色: r=red g=green b=blue a=alpha即不透明度 -->
<material name="black">
<color rgba="0.7 0.5 0 0.5" />
</material>
</visual>
</link>
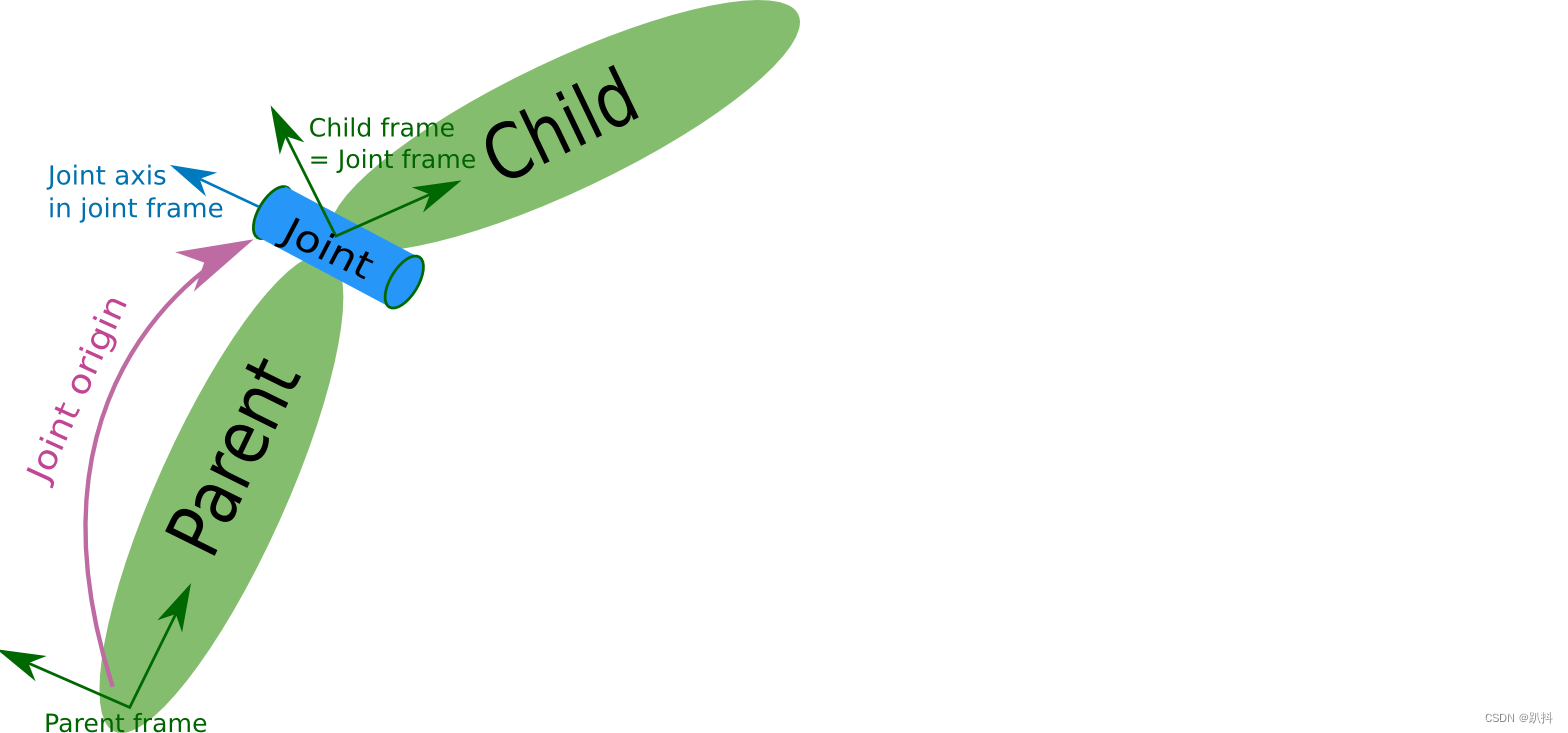
joint
joint 标签用于描述机器人关节的运动学和动力学属性,还可以指定关节运动的安全极限,机器人的两个部件(分别称之为 parent link 与 child link)以"关节"的形式相连接,不同的关节有不同的运动形式:旋转、滑动、固定、旋转速度、旋转角度限制等。比如:安装在底座上的轮子可以360度旋转,而摄像头则可能是完全固定在底座上。该标签对应的数据在模型中是不可见的。
属性:
-
name:关节名称
-
type:关节运动形式
-
continuous:旋转关节,可以绕单轴无限旋转
-
revolute:旋转关节,类似于 continues,但是有旋转角度限制
-
prismatic:滑动关节,沿某一轴线移动的关节,有位置极限
-
planer:平面关节,允许在平面正交方向上平移或旋转
-
floating:浮动关节,允许进行平移、旋转运动
-
fixed:固定关节,不允许运动的特殊关节
-
子标签:
- parent(必需的)
属性:link=(强制)父级连杆的名字,是这个link在机器人结构树中的名字。 - child(必需的)
属性:link=(强制)子级连杆的名字,是这个link在机器人结构树中的名字。 - origin
属性:xyz=各轴线上的偏移量 rpy=各轴线上的偏移弧度。 - axis
属性: xyz用于设置围绕哪个关节轴运动。
举例:
<!--
需求: 创建机器人模型,底盘为长方体,
在长方体的前面添加一摄像头,
摄像头可以沿着 Z 轴 360 度旋转
-->
<robot name="mycar">
<!-- 底盘 -->
<link name="base_link">
<visual>
<geometry>
<box size="0.5 0.2 0.1" />
</geometry>
<origin xyz="0 0 0" rpy="0 0 0" />
<material name="blue">
<color rgba="0 0 1.0 0.5" />
</material>
</visual>
</link>
<!-- 摄像头 -->
<link name="camera">
<visual>
<geometry>
<box size="0.02 0.05 0.05" />
</geometry>
<origin xyz="0 0 0" rpy="0 0 0" />
<material name="red">
<color rgba="1 0 0 0.5" />
</material>
</visual>
</link>
<!-- 关节 -->
<joint name="camera2baselink" type="continuous">
<!-- 父级连杆 -->
<parent link="base_link"/>
<!-- 子级连杆 -->
<child link="camera" />
<!-- 需要计算两个 link 的物理中心之间的偏移量 -->
<origin xyz="0.2 0 0.075" rpy="0 0 0" />
<axis xyz="0 0 1" />
</joint>
</robot>
URDF优化——xacro
Xacro 是一种 XML 宏语言,是可编程的 XML。Xacro 可以声明变量,可以通过数学运算求解,使用流程控制控制执行顺序,还可以通过类似函数的实现,封装固定的逻辑,将逻辑中需要的可变的数据以参数的方式暴露出去,从而提高代码复用率以及程序的安全性。
简单来说,就是xacro可以帮你以类似函数的形式来封装代码和参数,以便复用。
相关语法
属性与算数运算
属性定义:
<xacro:property name="xxxx" value="yyyy" />
属性调用:
${属性名称}
算术运算:
${数学表达式}
宏
类似于函数实现
宏定义:
<xacro:macro name="宏名称" params="参数列表(多参数之间使用空格分隔)">
.....
参数调用格式: ${参数名}
</xacro:macro>
宏调用:
<xacro:宏名称 参数1=xxx 参数2=xxx/>
文件包含
<robot name="xxx" xmlns:xacro="http://wiki.ros.org/xacro">
<xacro:include filename="my_base.xacro" />
<xacro:include filename="my_camera.xacro" />
<xacro:include filename="my_laser.xacro" />
</robot>
实操
实现流程:
-
创建一个新的功能包,名称自定义,导入依赖包:
urdf与xacro -
首先编写摄像头和雷达的 xacro 文件
-
然后再编写一个组合文件,组合底盘、摄像头与雷达
-
最后,通过 launch 文件启动 Rviz 并显示模型
底盘、摄像头和雷达Xacro文件实现
底盘xacro文件:my_base.urdf.xacro
<!--
使用 xacro 优化 URDF 版的小车底盘实现:
实现思路:
1.将一些常量、变量封装为 xacro:property
比如:PI 值、小车底盘半径、离地间距、车轮半径、宽度 ....
2.使用 宏 封装驱动轮以及支撑轮实现,调用相关宏生成驱动轮与支撑轮
-->
<!-- 根标签,必须声明 xmlns:xacro -->
<robot name="my_base" xmlns:xacro="http://www.ros.org/wiki/xacro">
<!-- 封装变量、常量 -->
<xacro:property name="PI" value="3.141"/>
<!-- 宏:黑色设置 -->
<material name="black">
<color rgba="0.0 0.0 0.0 1.0" />
</material>
<!-- 底盘属性 -->
<xacro:property name="base_footprint_radius" value="0.001" /> <!-- base_footprint 半径 -->
<xacro:property name="base_link_radius" value="0.1" /> <!-- base_link 半径 -->
<xacro:property name="base_link_length" value="0.08" /> <!-- base_link 长 -->
<xacro:property name="earth_space" value="0.015" /> <!-- 离地间距 -->
<!-- 底盘 -->
<link name="base_footprint">
<visual>
<geometry>
<!-- 支撑轮封装量的调用 -->
<sphere radius="${base_footprint_radius}" />
</geometry>
</visual>
</link>
<link name="base_link">
<visual>
<geometry>
<cylinder radius="${base_link_radius}" length="${base_link_length}" />
</geometry>
<origin xyz="0 0 0" rpy="0 0 0" />
<material name="yellow">
<color rgba="0.5 0.3 0.0 0.5" />
</material>
</visual>
</link>
<joint name="base_link2base_footprint" type="fixed">
<parent link="base_footprint" />
<child link="base_link" />
<origin xyz="0 0 ${earth_space + base_link_length / 2 }" />
</joint>
<!-- 驱动轮 -->
<!-- 驱动轮属性 -->
<xacro:property name="wheel_radius" value="0.0325" /><!-- 半径 -->
<xacro:property name="wheel_length" value="0.015" /><!-- 宽度 -->
<!-- 驱动轮宏实现 -->
<xacro:macro name="add_wheels" params="name flag">
<link name="${name}_wheel">
<visual>
<geometry>
<cylinder radius="${wheel_radius}" length="${wheel_length}" />
</geometry>
<origin xyz="0.0 0.0 0.0" rpy="${PI / 2} 0.0 0.0" />
<material name="black" />
</visual>
</link>
<joint name="${name}_wheel2base_link" type="continuous">
<parent link="base_link" />
<child link="${name}_wheel" />
<origin xyz="0 ${flag * base_link_radius} ${-(earth_space + base_link_length / 2 - wheel_radius) }" />
<axis xyz="0 1 0" />
</joint>
</xacro:macro>
<xacro:add_wheels name="left" flag="1" />
<xacro:add_wheels name="right" flag="-1" />
<!-- 支撑轮 -->
<!-- 支撑轮属性 -->
<xacro:property name="support_wheel_radius" value="0.0075" /> <!-- 支撑轮半径 -->
<!-- 支撑轮宏 -->
<xacro:macro name="add_support_wheel" params="name flag" >
<link name="${name}_wheel">
<visual>
<geometry>
<sphere radius="${support_wheel_radius}" />
</geometry>
<origin xyz="0 0 0" rpy="0 0 0" />
<material name="black" />
</visual>
</link>
<joint name="${name}_wheel2base_link" type="continuous">
<parent link="base_link" />
<child link="${name}_wheel" />
<origin xyz="${flag * (base_link_radius - support_wheel_radius)} 0 ${-(base_link_length / 2 + earth_space / 2)}" />
<axis xyz="1 1 1" />
</joint>
</xacro:macro>
<!-- 支撑轮宏的调用 -->
<xacro:add_support_wheel name="front" flag="1" />
<xacro:add_support_wheel name="back" flag="-1" />
</robot>
摄像头xacro文件:my_camera.urdf.xacro
<!-- 摄像头相关的 xacro 文件 -->
<robot name="my_camera" xmlns:xacro="http://wiki.ros.org/xacro">
<!-- 摄像头属性 -->
<xacro:property name="camera_length" value="0.01" /> <!-- 摄像头长度(x) -->
<xacro:property name="camera_width" value="0.025" /> <!-- 摄像头宽度(y) -->
<xacro:property name="camera_height" value="0.025" /> <!-- 摄像头高度(z) -->
<xacro:property name="camera_x" value="0.08" /> <!-- 摄像头安装的x坐标 -->
<xacro:property name="camera_y" value="0.0" /> <!-- 摄像头安装的y坐标 -->
<xacro:property name="camera_z" value="${base_link_length / 2 + camera_height / 2}" /> <!-- 摄像头安装的z坐标:底盘高度 / 2 + 摄像头高度 / 2 -->
<!-- 摄像头关节以及link -->
<link name="camera">
<visual>
<geometry>
<box size="${camera_length} ${camera_width} ${camera_height}" />
</geometry>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" />
<material name="black" />
</visual>
</link>
<joint name="camera2base_link" type="fixed">
<parent link="base_link" />
<child link="camera" />
<origin xyz="${camera_x} ${camera_y} ${camera_z}" />
</joint>
</robot>
雷达xacro文件:my_laser.urdf.xacro
<!--
小车底盘添加雷达
-->
<robot name="my_laser" xmlns:xacro="http://wiki.ros.org/xacro">
<!-- 雷达支架 -->
<xacro:property name="support_length" value="0.15" /> <!-- 支架长度 -->
<xacro:property name="support_radius" value="0.01" /> <!-- 支架半径 -->
<xacro:property name="support_x" value="0.0" /> <!-- 支架安装的x坐标 -->
<xacro:property name="support_y" value="0.0" /> <!-- 支架安装的y坐标 -->
<xacro:property name="support_z" value="${base_link_length / 2 + support_length / 2}" /> <!-- 支架安装的z坐标:底盘高度 / 2 + 支架高度 / 2 -->
<link name="support">
<visual>
<geometry>
<cylinder radius="${support_radius}" length="${support_length}" />
</geometry>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" />
<material name="red">
<color rgba="0.8 0.2 0.0 0.8" />
</material>
</visual>
</link>
<joint name="support2base_link" type="fixed">
<parent link="base_link" />
<child link="support" />
<origin xyz="${support_x} ${support_y} ${support_z}" />
</joint>
<!-- 雷达属性 -->
<xacro:property name="laser_length" value="0.05" /> <!-- 雷达长度 -->
<xacro:property name="laser_radius" value="0.03" /> <!-- 雷达半径 -->
<xacro:property name="laser_x" value="0.0" /> <!-- 雷达安装的x坐标 -->
<xacro:property name="laser_y" value="0.0" /> <!-- 雷达安装的y坐标 -->
<xacro:property name="laser_z" value="${support_length / 2 + laser_length / 2}" /> <!-- 雷达安装的z坐标:支架高度 / 2 + 雷达高度 / 2 -->
<!-- 雷达关节以及link -->
<link name="laser">
<visual>
<geometry>
<cylinder radius="${laser_radius}" length="${laser_length}" />
</geometry>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" />
<material name="black" />
</visual>
</link>
<joint name="laser2support" type="fixed">
<parent link="support" />
<child link="laser" />
<origin xyz="${laser_x} ${laser_y} ${laser_z}" />
</joint>
</robot>
组合底盘摄像头与雷达的xacro文件
my_base_camera_laser.urdf.xacro
<!-- 组合小车底盘与摄像头与雷达 -->
<robot name="my_car_camera" xmlns:xacro="http://wiki.ros.org/xacro">
<xacro:include filename="my_base.urdf.xacro" />
<xacro:include filename="my_camera.urdf.xacro" />
<xacro:include filename="my_laser.urdf.xacro" />
</robot>
launch文件
test.launch
<launch>
<param name="robot_description" command="$(find xacro)/xacro $(find urdf01_rviz)/urdf/xacro/my_base_camera_laser.urdf.xacro" />
<!-- 启动Rviz -->
<node pkg="rviz" type="rviz" name="rviz" />
<!-- 添加关节状态发布节点 -->
<node pkg="joint_state_publisher" type="joint_state_publisher" name="joint_state_publisher" output="screen" />
<!-- 添加机器人状态发布节点 -->
<node pkg="robot_state_publisher" type="robot_state_publisher" name="robot_state_publisher" output="screen" />
<!-- 可选:用于控制关节运动的节点,会生成关节控制的UI -->
<node pkg="joint_state_publisher_gui" type="joint_state_publisher_gui" name="joint_state_publisher_gui" output="screen" />
</launch>
在Rviz中显示机器人模型
调出终端并输入以下指令:
source ./devel/setup.bash
roslaunch 包名 test.launch
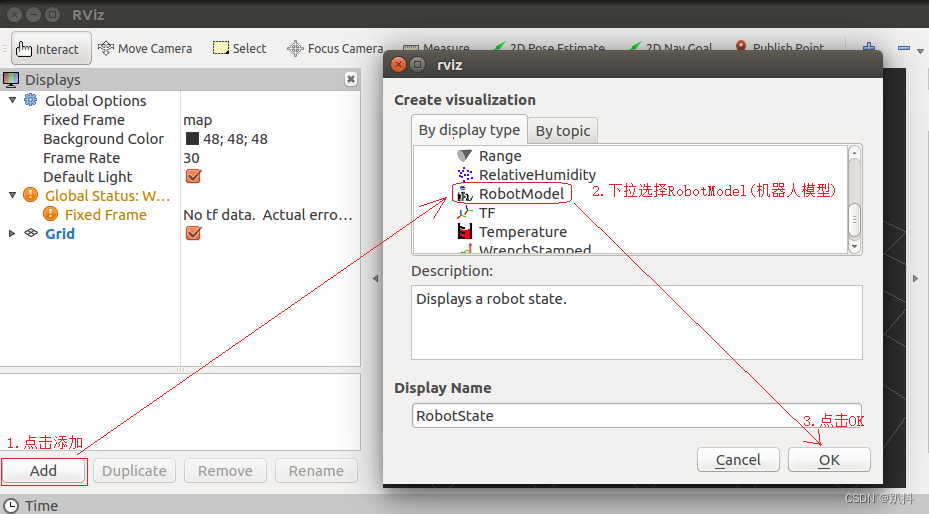
手动添加机器人显示组件RobotModel:
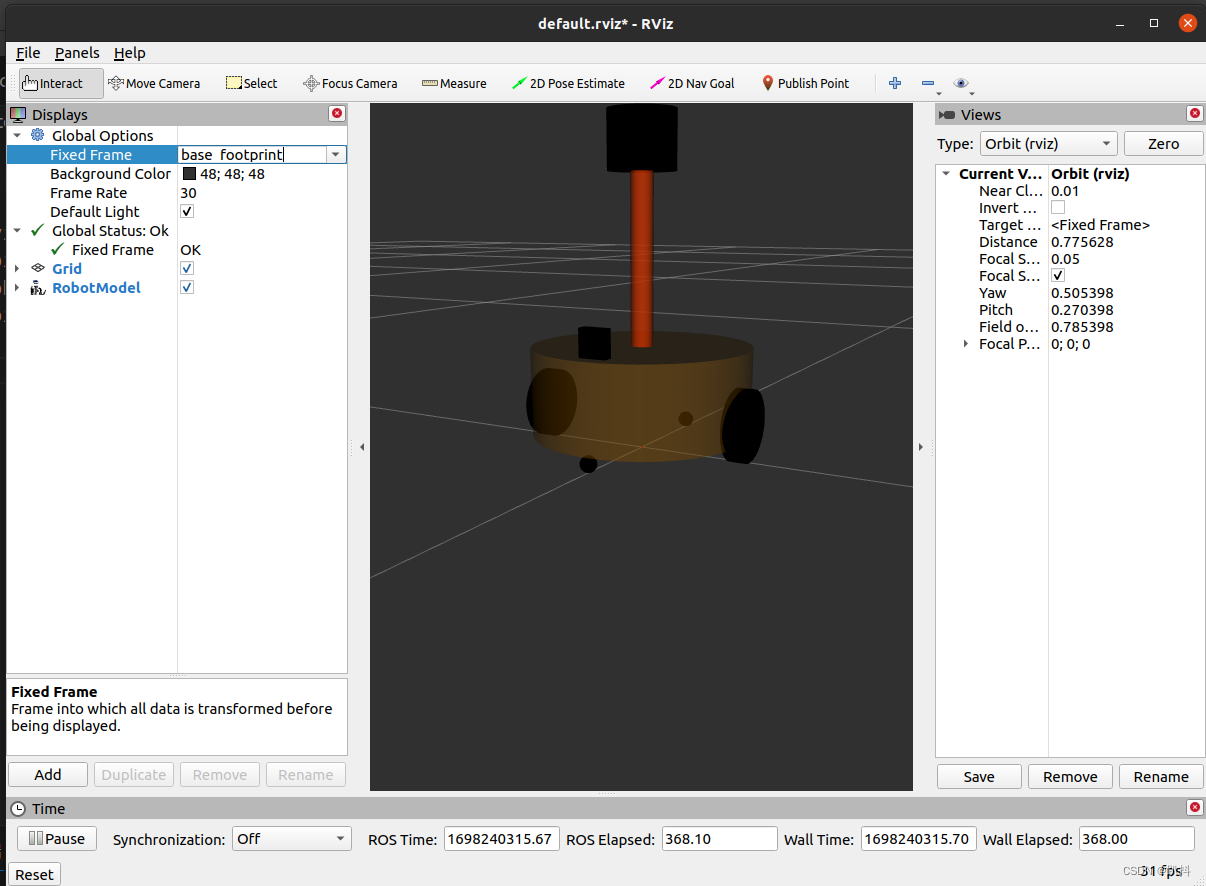
在Fixed Frame中选择base_footprint,即可显示机器人:















 2869
2869











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









