






AUV 增量PID轨迹跟踪 MATLAB仿真
水下机器人控制 无人船无人艇 USV路径跟随
ID:48128715103705633
南唐著名地椒糖
随着科技的发展,水下机器人在海洋勘探、海洋资源开发和环境监测方面发挥着越来越重要的作用。其中,自主水下机器人(AUV)和无人船(USV)作为两种常见的水下机器人类型,具有较高的灵活性和多样性,在水下任务执行中具有广阔的应用前景。然而,在实际应用过程中,如何实现准确的路径跟踪仍然是一个挑战。
路径跟踪是自主水下机器人和无人船关键的技术之一。通过实现AUV和USV对于预定路径的准确控制,可以有效实现海洋勘探与资源开发等任务。在现实环境中,水下机器人和无人船需要面对复杂多变的海洋环境,如海流、风浪和海洋植被等,这些因素都会对路径跟踪的精度产生影响。
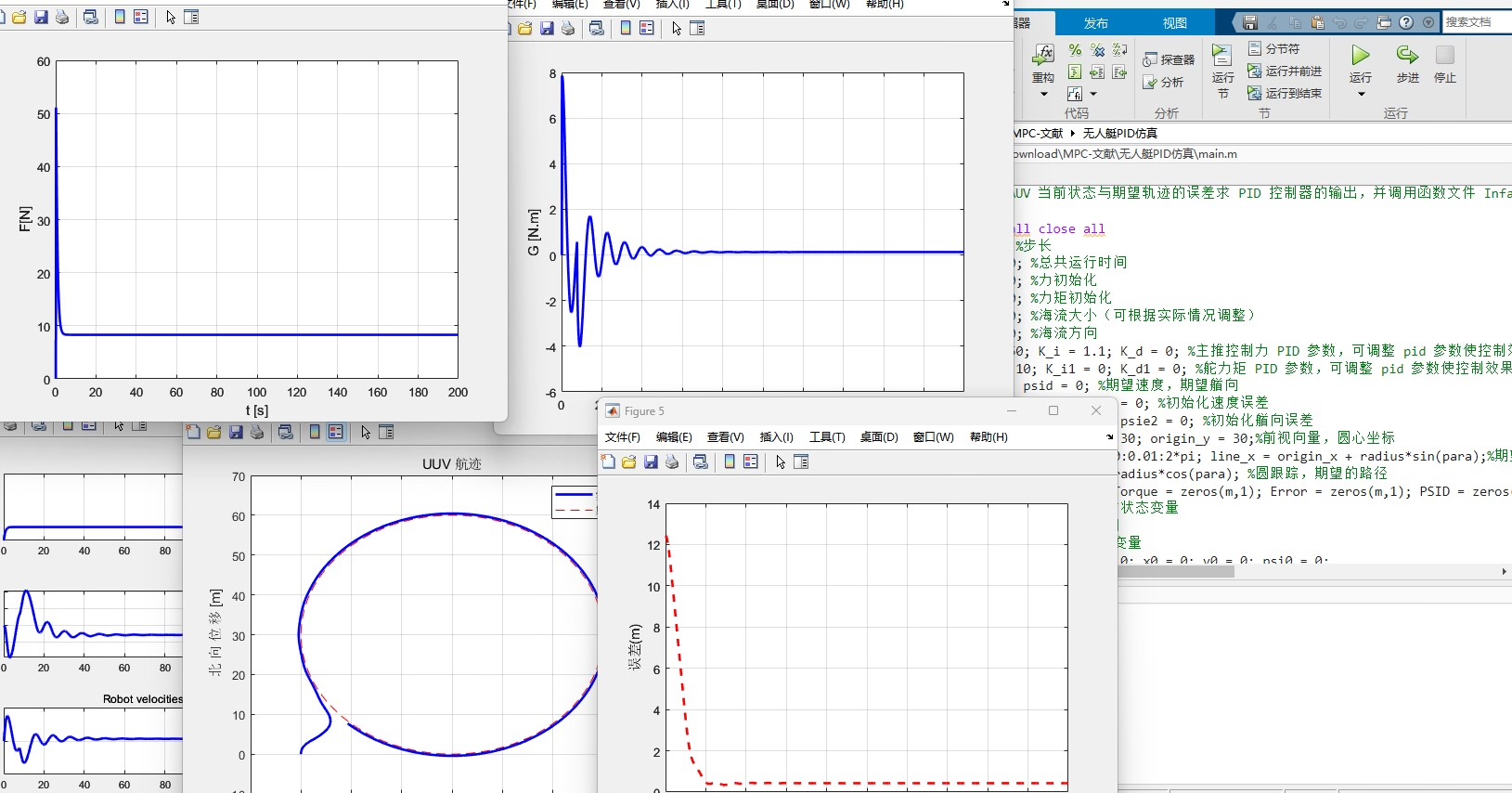
为了实现路径跟踪的准确性,PID控制器被广泛应用于水下机器人和无人船的控制系统中。PID控制器是一种经典的控制方式,通过不断调整控制参数来尽可能减小实际输出与期望输出之间的误差。在AUV和USV控制中,增量式PID控制方法常被采用。该方法通过对当前误差和误差变化率的计算,实时调整控制量,从而实现轨迹跟踪。
MATLAB仿真是一种常见的评估和优化控制算法的方法。通过建立水下机器人和无人船的数学模型,结合实际环境参数,可以利用MATLAB软件进行仿真分析。在AUV和USV的路径跟踪中,MATLAB仿真可以帮助工程师研究不同控制参数对跟踪性能的影响,并提供最佳的控制策略。
在路径跟踪技术的研究中,还有一种重要的概念是无人船无人艇的路径跟随。路径跟随是无人船和无人艇智能化水下机器人的重要应用领域。通过将传感器和导航系统与路径规划和控制算法相结合,可以实现无人船和无人艇对于指定路径的自主跟随。这种技术在海洋资源勘探和环境监测中具有重要的意义。
总结来说,在AUV和USV路径跟踪中,增量PID控制和MATLAB仿真是两个关键的技术手段。通过合理调整PID控制器的参数,结合MATLAB仿真分析,可以实现水下机器人和无人船的精确路径跟踪。在实际应用中,还需要考虑到海洋环境的复杂性和路径跟随的智能化,以进一步提高水下机器人和无人船的控制性能。未来,随着技术的不断发展,相信水下机器人和无人船在海洋领域的应用将会取得更大的突破。
【相关代码,程序地址】:http://fansik.cn/715103705633.html
















 831
831











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









