






无人车辆 轨迹跟踪 LOS制导无人艇无人船
Fossen模型 文献复现 大量出图 路径跟随
MATLAB仿真 simulink仿真
ID:85109715102089242
南唐著名地椒糖
无人车辆、轨迹跟踪、LOS制导无人艇和无人船是当今智能交通和航运领域研究的热点话题。这些技术的发展为实现自动驾驶和无人船舶提供了新的可能性。本文将围绕这些关键词展开,探讨Fossen模型、文献复现、大量出图、路径跟随以及MATLAB仿真和Simulink仿真等技术在无人车辆和无人船舶领域的应用。
首先,我们将介绍无人车辆和无人船舶的概念和发展现状。随着人工智能和自动化技术的快速发展,无人车辆和无人船舶已经成为追求更高效和更安全交通和航运系统的重要领域。无人车辆的轨迹跟踪和无人船舶的LOS制导成为研究的热点,因为它们可以确保车辆和船舶按照预定路径行驶,从而减少事故风险和提高运输效率。
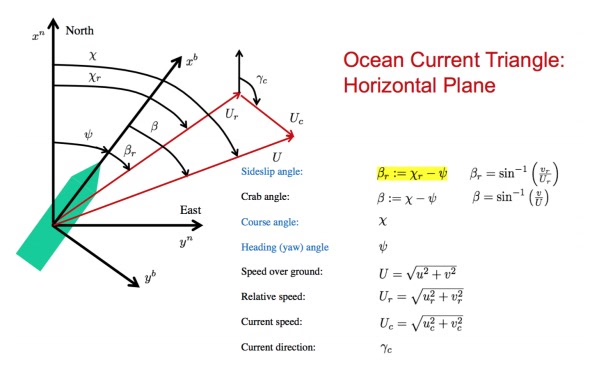
然后,我们将介绍Fossen模型在无人车辆和无人船舶中的应用。Fossen模型是一种常用的动力学模型,它能够准确描述船舶和车辆的运动特性,并提供了实现轨迹跟踪和路径跟随控制的基础。我们将详细介绍Fossen模型的原理和参数,并说明如何根据具体情况进行模型的选择和调整。
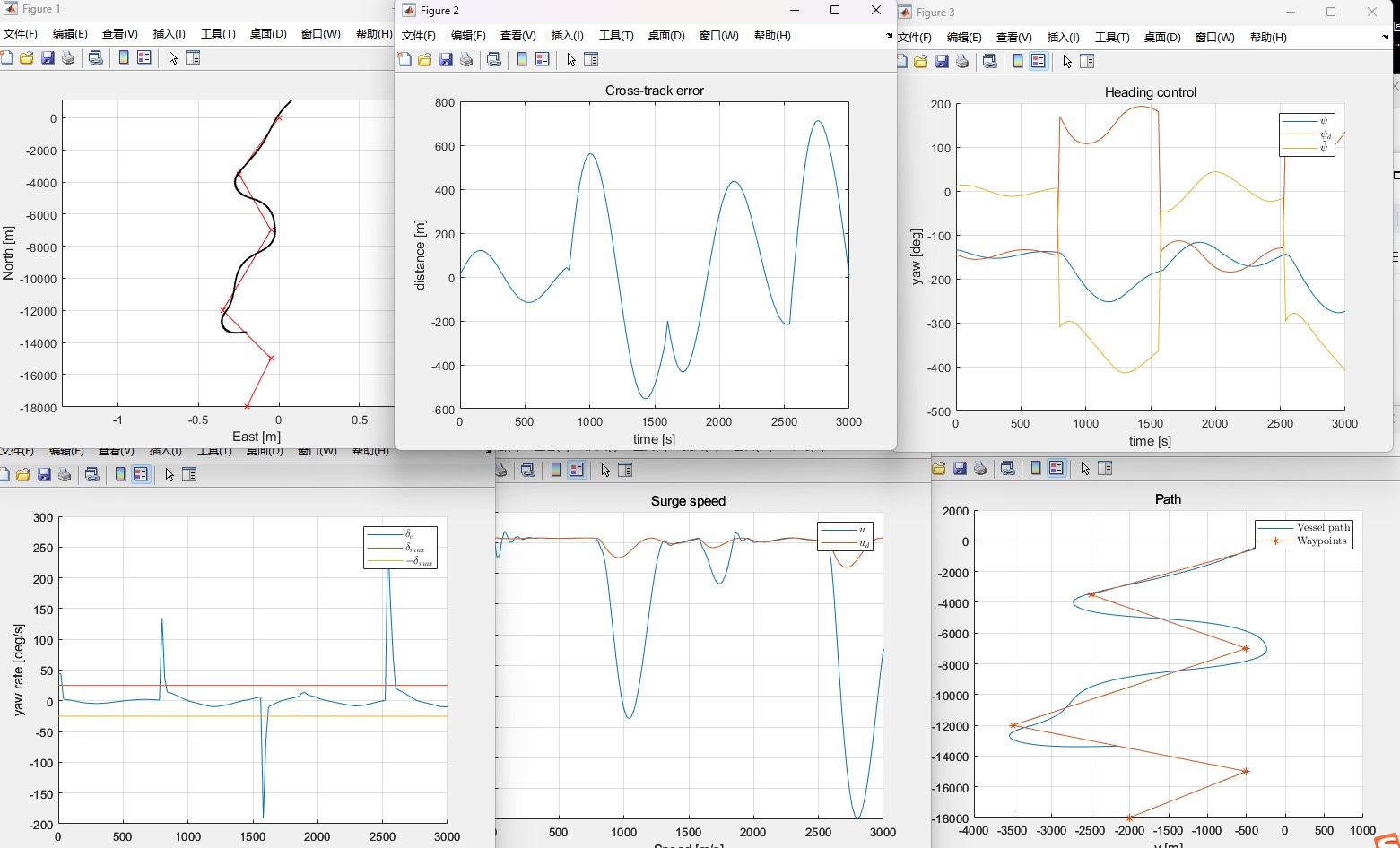
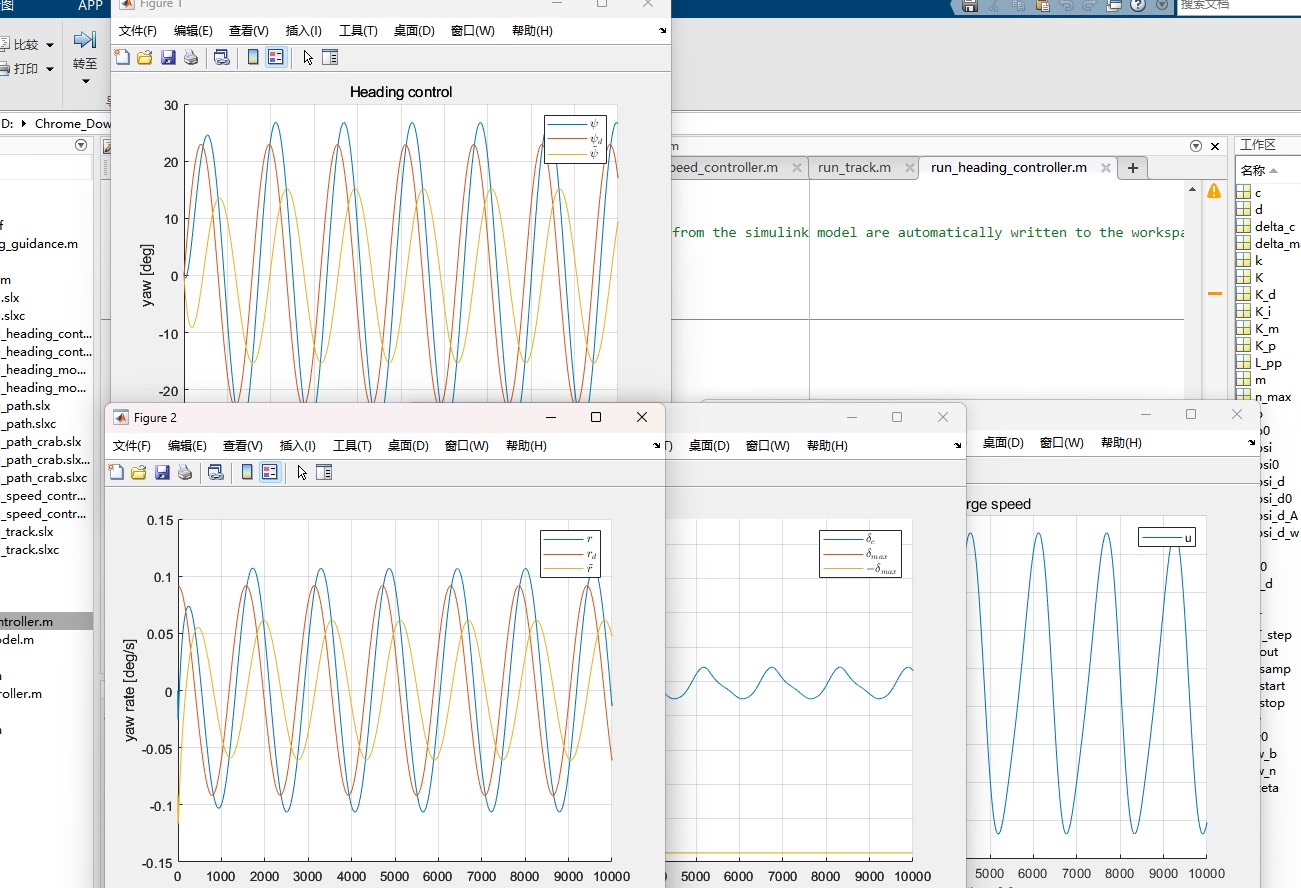
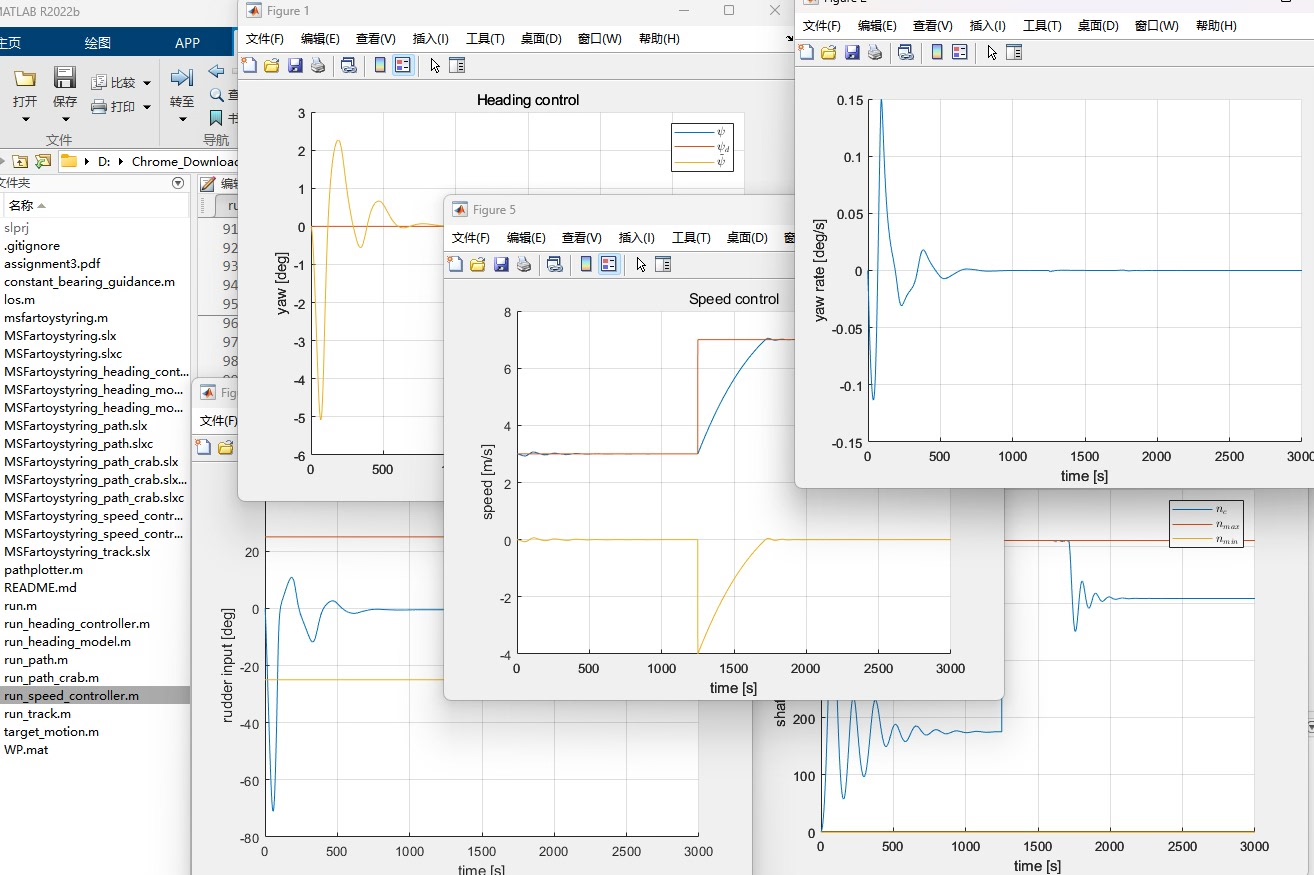
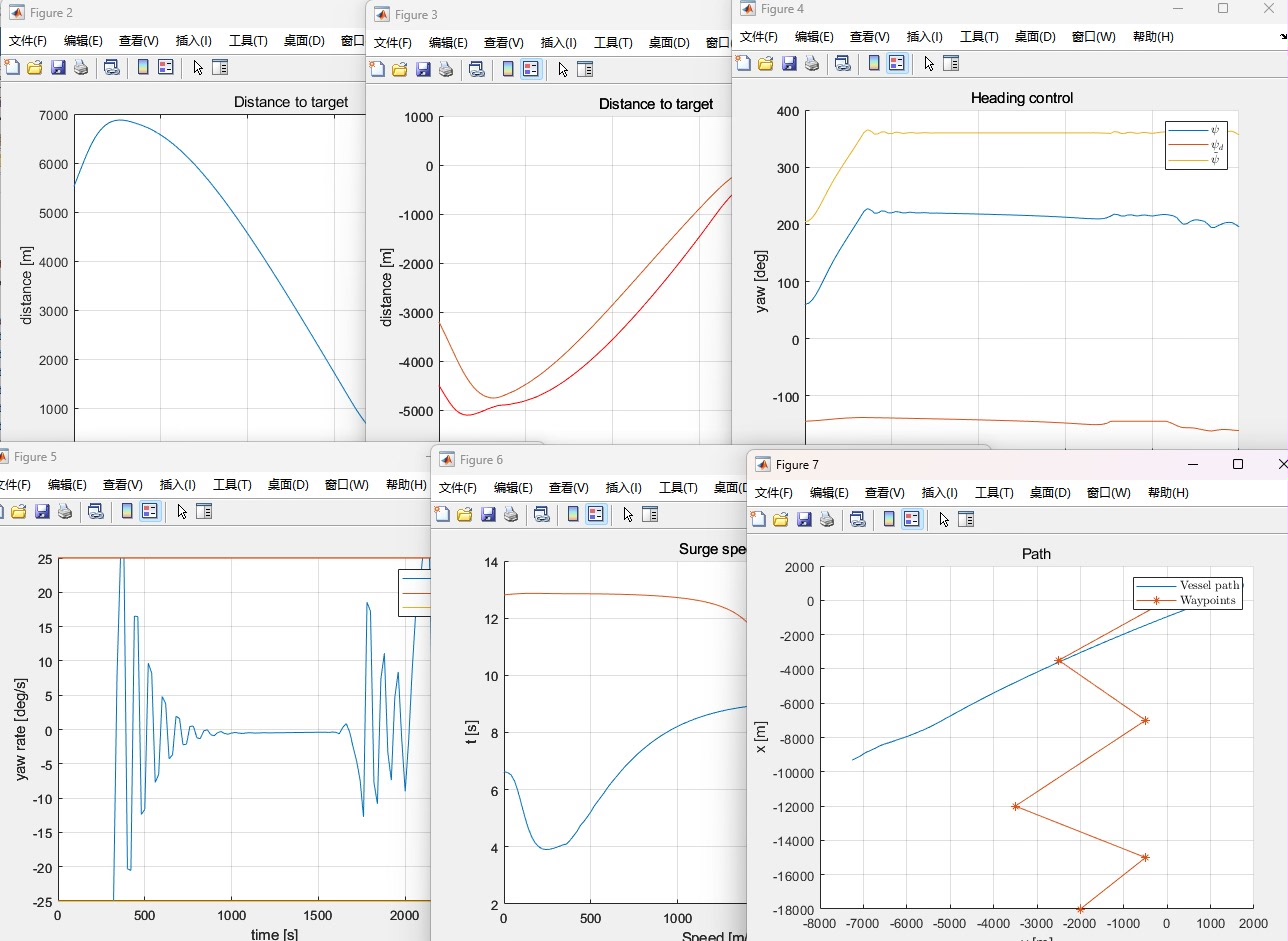
接着,我们将探讨文献复现在无人车辆和无人船舶研究中的重要性。文献复现是指通过重复他人的研究实验,验证其结果的可靠性和有效性。我们将介绍文献复现的步骤和方法,并通过实例说明如何利用已有文献中的成果进行仿真实验。同时,我们将重点讨论大量出图的意义与方法,展示仿真实验结果的可视化效果。
此外,我们将详细介绍路径跟随技术在无人车辆和无人船舶中的应用。路径跟随是指车辆或船舶按照预定路径行驶,并实时调整行驶轨迹以应对环境变化。我们将介绍路径规划和路径跟随控制的基本原理,并分析不同环境下的路径跟随策略和算法。通过MATLAB仿真和Simulink仿真,我们将展示不同路径跟随控制方法的效果和特点。
最后,我们将总结本文的主要内容,并展望无人车辆和无人船舶技术的未来发展趋势。随着人工智能和自动化技术的不断进步,无人车辆和无人船舶的研究将继续深入,并为交通和航运行业带来更大的变革。
通过本文的阐述,读者将对无人车辆和无人船舶的轨迹跟踪、LOS制导、Fossen模型、文献复现、大量出图、路径跟随以及MATLAB仿真和Simulink仿真等技术有一个全面的了解。本文旨在为程序员社区的读者提供一个技术分析的视角,帮助他们更好地了解和应用这些关键技术,推动无人交通和航运的发展。
【相关代码,程序地址】:http://fansik.cn/715102089242.html
















 1642
1642











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









