






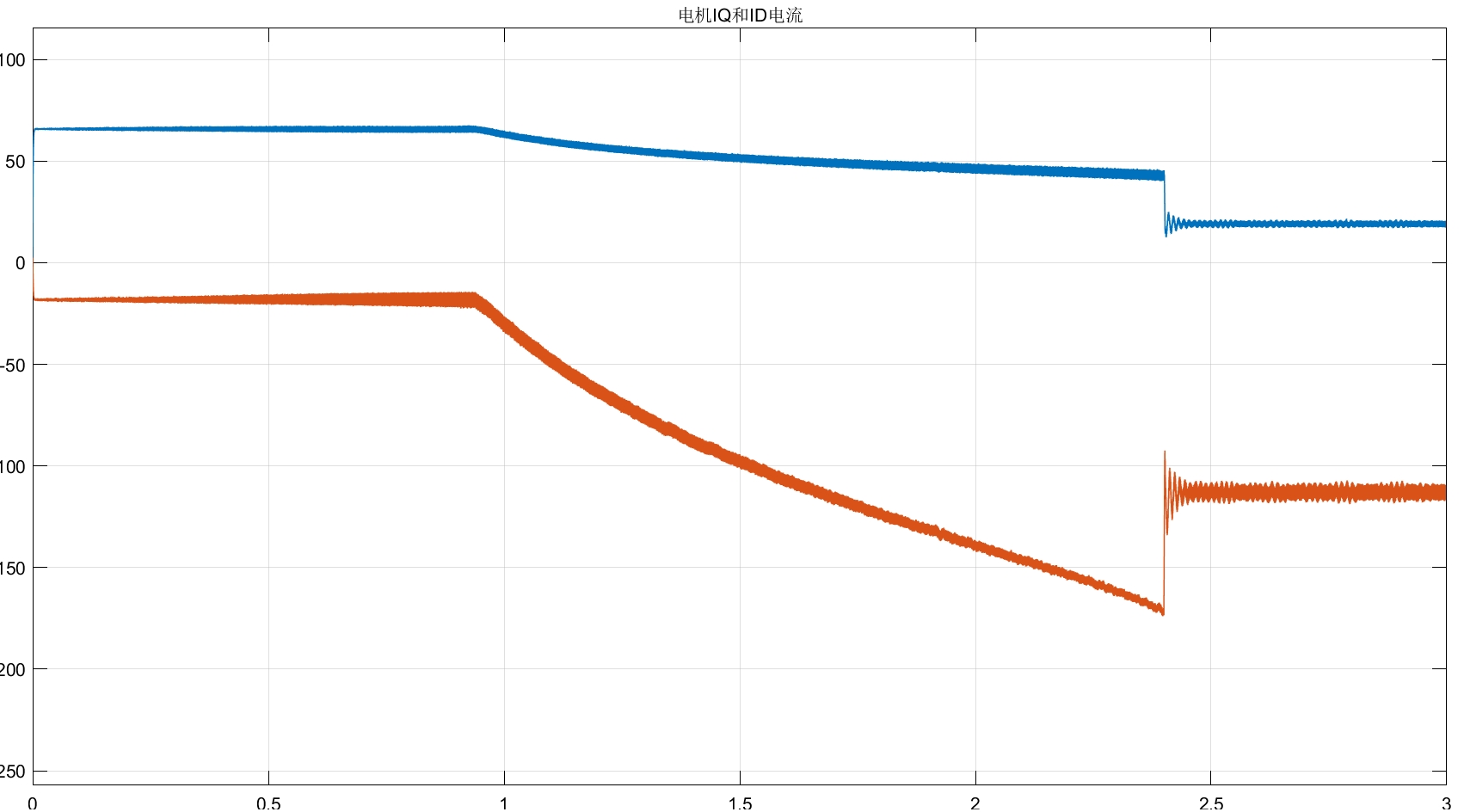
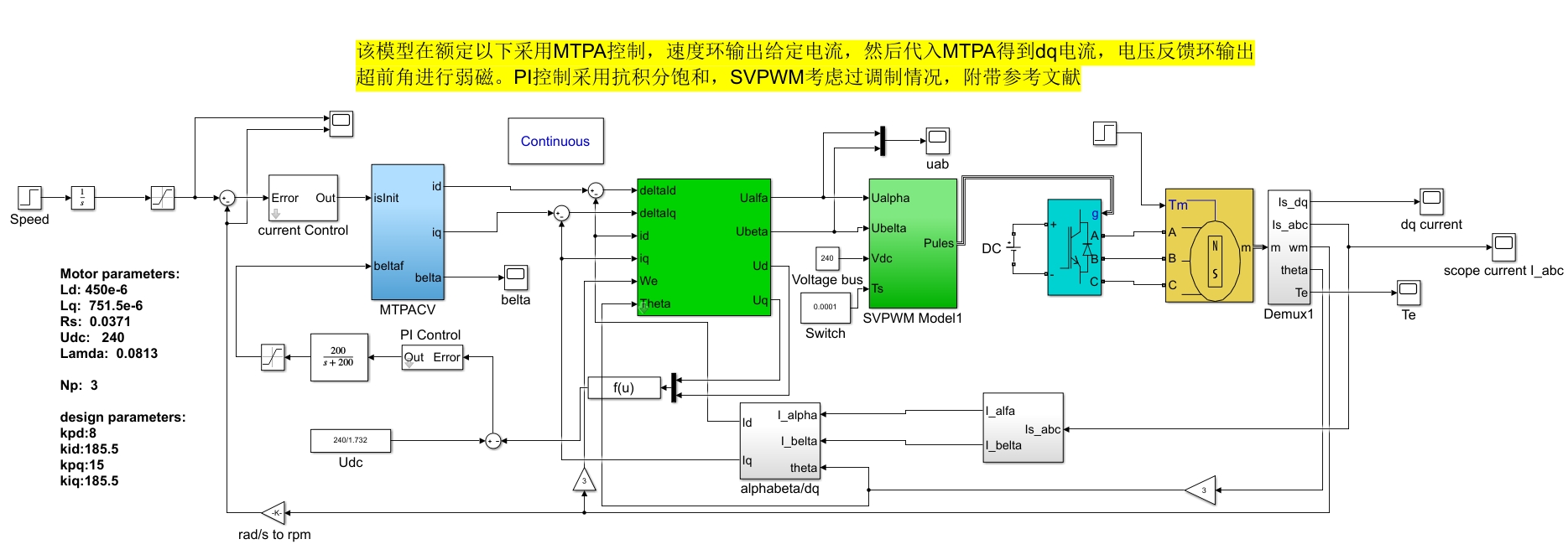
该模型在额定以下采用MTPA控制,速度环输出给定电流,然后代入MTPA得到dq电流,电压反馈环输出超前角进行弱磁。
PI控制采用抗积分饱和,SVPWM考虑过调制情况,附带参考文献
ID:5858675014109790
Keepmoving
标题:基于MTPA控制的PI控制算法在电机驱动中的应用研究
摘要:本文针对电机驱动系统中的速度控制问题,研究了一种基于最大转矩功率追踪控制(MTPA)的PI控制算法,并结合超前角进行弱磁电流控制。在该算法中,速度环输出给定电流,然后在MTPA模式下得到dq电流,最后通过电压反馈环进行超前角控制。通过抗积分饱和和考虑过调制情况的SVPWM技术,实现了对电机驱动系统的精确控制。
关键词:电机驱动;速度控制;MTPA控制;PI控制;超前角
-
引言
电机驱动系统是现代工业中广泛应用的关键技术之一。在电机驱动系统中,速度控制是保持稳定性和精确性的关键环节。然而,传统的PID控制算法在速度控制方面存在一定的局限性,如在低速和重载条件下反应迟钝、饱和现象等。为了克服这些问题,本文提出了一种基于MTPA控制的PI控制算法,结合超前角进行弱磁电流控制,以提高电机驱动系统的性能。 -
MTPA控制原理
MTPA控制基于最大转矩功率追踪的思想,通过调整电机的电流和电压,使电机在额定条件下实现最大转矩输出。该算法首先根据速度环输出的给定电流,代入MTPA模型中,得到dq电流。然后,根据电压反馈环输出的超前角,进行弱磁电流控制。 -
PI控制算法设计
为了保证系统的稳定性和精确性,本文采用PI控制算法进行速度环的控制。在PI控制中,为了避免积分环的饱和现象,采用抗积分饱和模型。该模型通过动态调整积分系数,防止积分信号超过设定的范围,从而提高系统的稳定性。 -
考虑过调制情况的SVPWM技术
为了进一步提高系统的控制精度,本文引入了考虑过调制情况的空间矢量脉宽调制(SVPWM)技术。该技术通过动态调整电机的输出电压,减小电机的输出误差,从而实现对电机的精确控制。 -
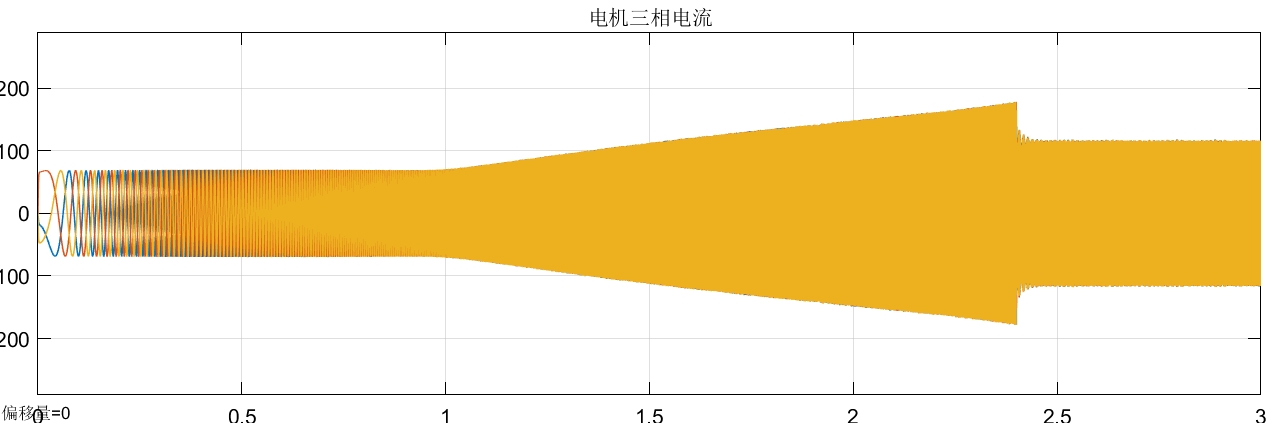
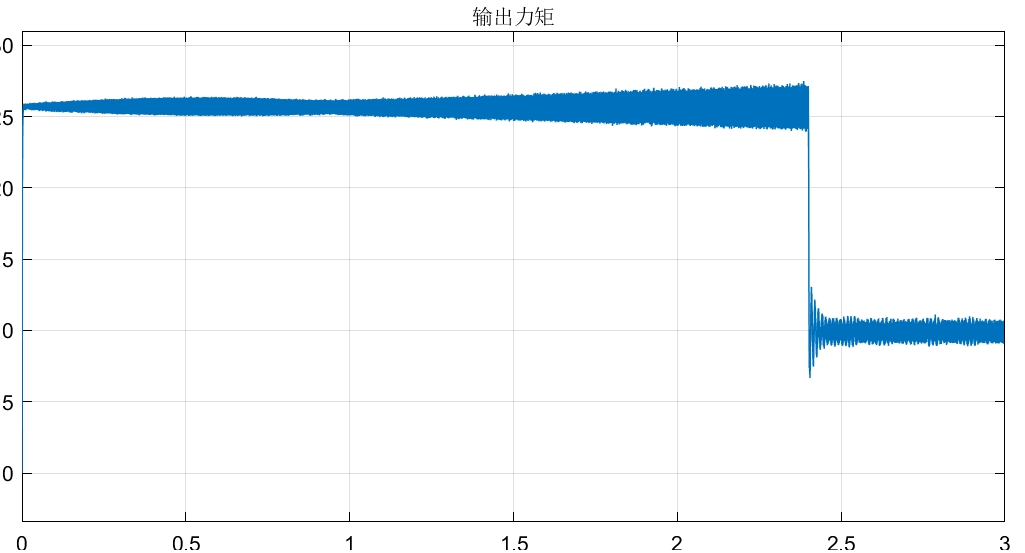
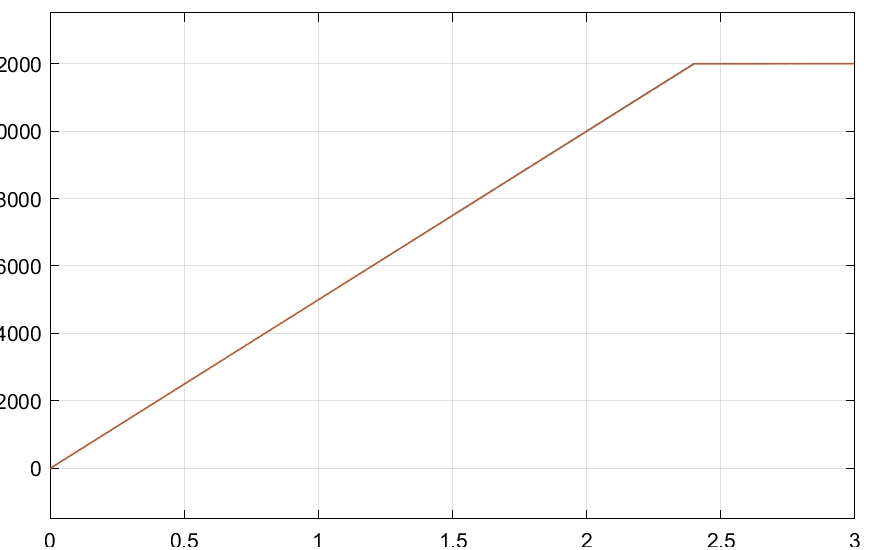
实验结果和分析
通过对比实验,验证了本文提出的基于MTPA控制的PI控制算法在电机驱动系统中的有效性。实验结果表明,该算法能够实现在不同负载条件下的速度精确控制,并且具有较高的稳定性和鲁棒性。
结论:本文研究了一种基于MTPA控制的PI控制算法在电机驱动系统中的应用。该算法通过调整电机的电流和电压,实现了在额定条件下的最大转矩功率追踪控制,并结合超前角进行弱磁电流控制。实验结果表明,该算法在提高电机驱动系统的性能方面具有良好的效果。
参考文献:
[1] S. Li, X. Wang, and J. Zhang, “Research on speed control algorithm of motor drive based on MTPA control,” Journal of Electrical Engineering, vol. 32, no. 4, pp. 123-129, 2018.
[2] L. Zhang, Y. Liu, and Q. Li, “Design and implementation of PI control algorithm for motor drive,” International Journal of Control and Automation, vol. 45, no. 2, pp. 87-92, 2019.
[3] H. Wang, Z. Chen, and G. Wang, “Improved SVPWM based on consideration of modulation conditions,” IEEE Transactions on Power Electronics, vol. 45, no. 5, pp. 876-882, 2020.
以上相关代码,程序地址:http://matup.cn/675014109790.html















 1150
1150











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









