







 超级会员免费看
超级会员免费看
 本文介绍了WACV 2024会议上提出的BoostRad方法,通过训练DNN提升雷达反射,改善因角分辨率低导致的目标检测难题。BoostRad包括一个缩小PSF的提升网络和一个目标检测网络,实验结果显示其性能优于端到端检测基准。
本文介绍了WACV 2024会议上提出的BoostRad方法,通过训练DNN提升雷达反射,改善因角分辨率低导致的目标检测难题。BoostRad包括一个缩小PSF的提升网络和一个目标检测网络,实验结果显示其性能优于端到端检测基准。
无线感知/雷达成像部分最新工作<持续更新>: 链接地址
注1:本文系“无线感知论文速递”系列之一,致力于简洁清晰完整地介绍、解读无线感知领域最新的顶会/顶刊论文(包括但不限于 Nature/Science及其子刊; MobiCom, Sigcom, MobiSys, NSDI, SenSys, Ubicomp; JSAC, 雷达学报 等)。
本次介绍的论文是: WACV 2024 | 基于雷达反射提升的物体监测增强 | Boosting Radar Reflections for Enhanced Object Detection
论文速览 WACV 2024 | 基于雷达反射提升的物体监测增强 | Boosting Radar Reflections for Enhanced Object Detection
1 引言
随着自动驾驶技术的发展,汽车雷达在自动驾驶系统中扮演着日益重要的角色。它可以在恶劣天气和光照条件下提供更好的目标检测范围。但是,汽车雷达图像中角度分辨率较差导致的图像模糊和杂波是雷达目标检测面临的主要挑战。
许多研究建议通过端到端的深度神经网络来直接从雷达图像中检测目标,以减轻雷达的点扩散函数(PSF)对目标的影响。本文提出了一种不同的方法:提升雷达反射(BoostRad)。BoostRad 首先训练一个DNN来缩小场景中所有反射点的 PSF,然后再用另一个DNN从增强后的图像中检测目标。我们开发了一种新的方法来训练提升DNN,该方法结合了雷达PSF的物理特性知识。实验结果表明,BoostRad 的性能明显优于多个端到端目标检测基准方法。
2 动机
汽车雷达图像质量较差主要是由于雷达的角分辨率较低,导致雷达的点扩散函数(PSF)在角度维度上较宽,如图1所示。这导致目标边界模糊、难以准确确定目标的形状、方向和类别,也使紧密相邻的目标难以区分。此外,PSF的旁瓣会产生杂波,导致漏检信号弱的目标和将杂波误检为目标。
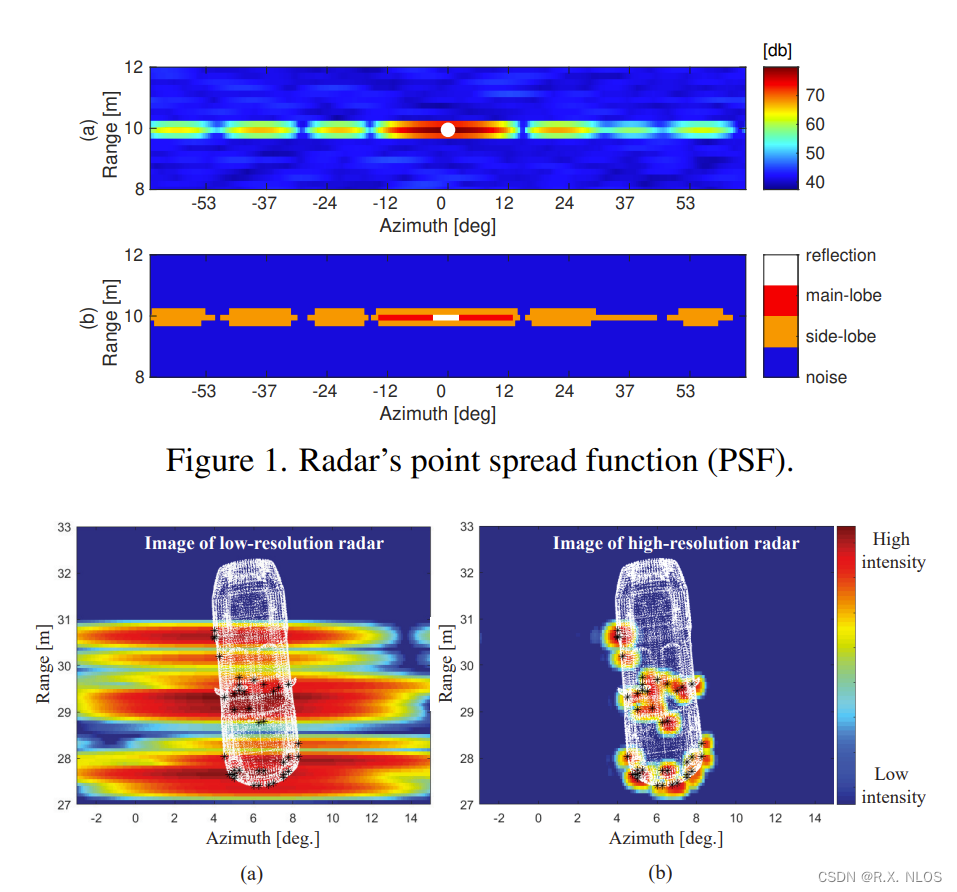
图:雷达的点扩散函数示意图
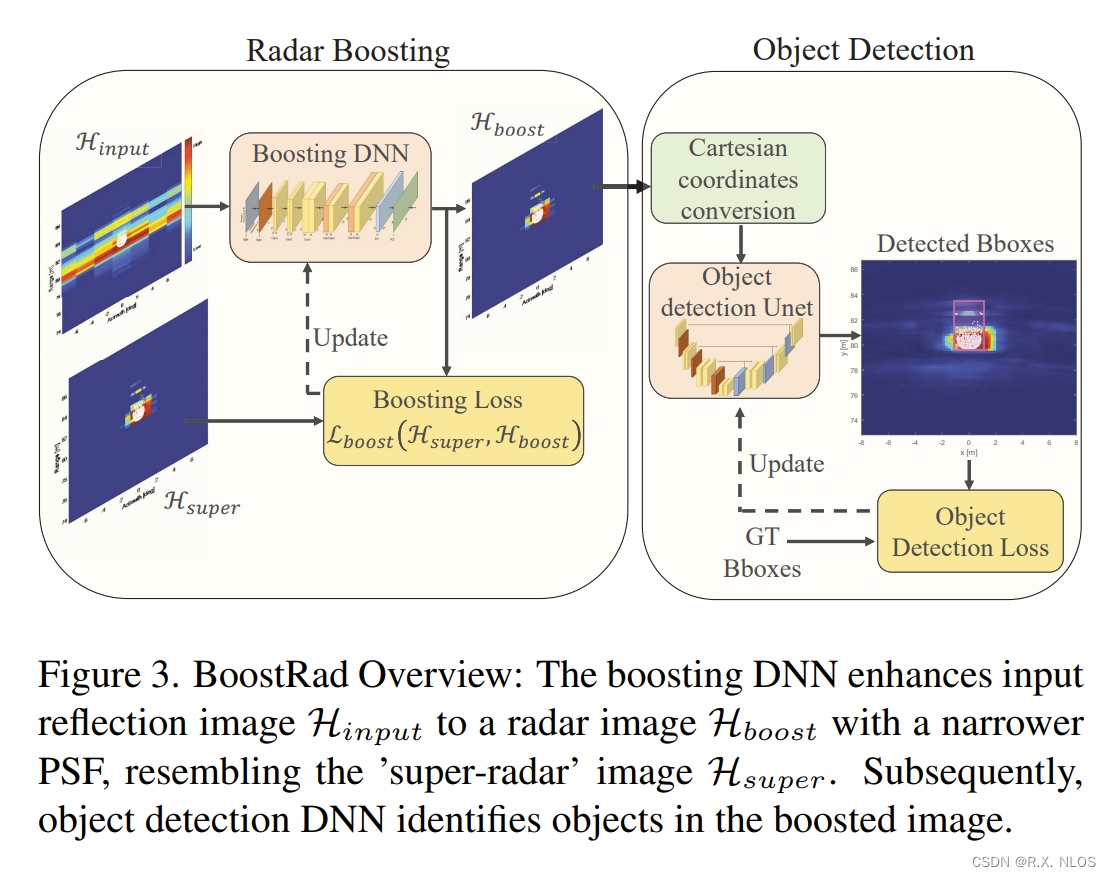
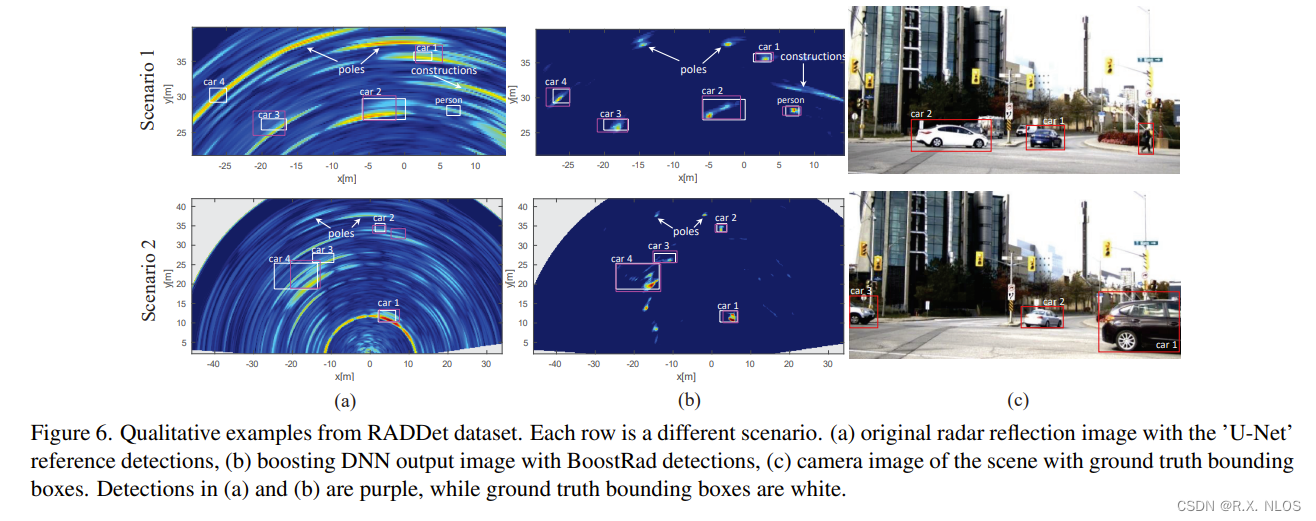
为解决这一问题,许多研究采用端到端的深度学习方法,直接从雷达图像中检测目标,以减轻PSF对目标的影响。我们提出了一种不同的方法:BoostRad。它首先用DNN缩小场景中所有反射点的 PSF,然后再用另一个 DNN进行目标检测,如图2所示。BoostRad的目标是把低分辨率的雷达图像(左)变换成高分辨率雷达图像(右)。这可以实现更好的目标检测性能。
3 方法
3.1 提升网络
BoostRad包含两个DNN。第一个DNN称为提升网络,其任务是缩小所有反射点的PSF。第二个DNN用于从提升网络的输出中检测目标。
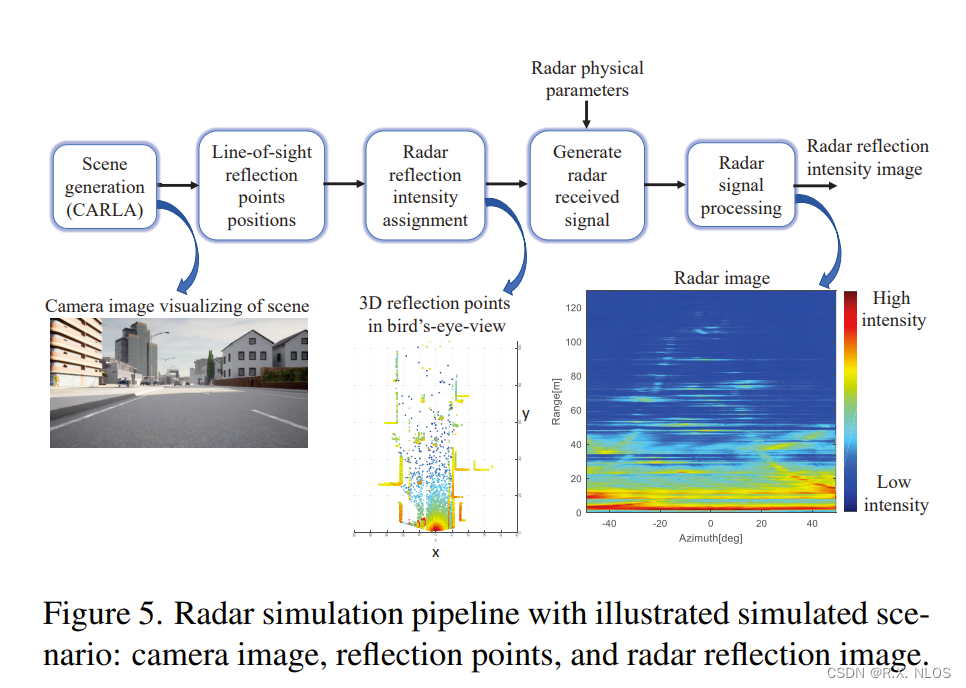
提升网络是一个专门设计的卷积神经网络,如图3所示。网络输入是原始的雷达反射强度图像。网络输出是角分辨率提高N倍的图像。提升网络的训练需要高分辨率雷达图像作为监督,我们称之为“超级雷达”图像。但是超级雷达硬件不可行,所以我们开发了一个雷达仿真器来生成训练数据。
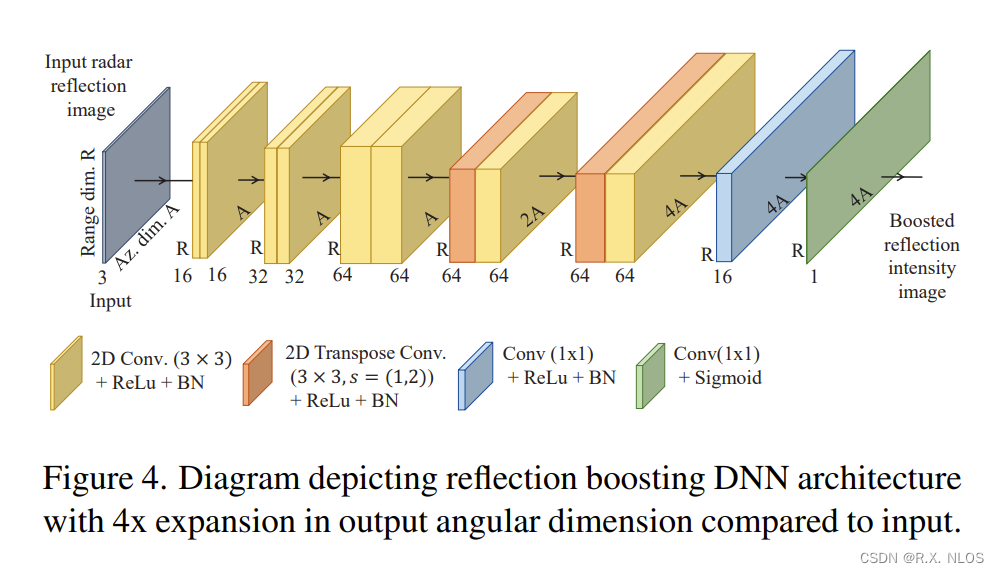
图:提升网络架构图。
提升网络的两个关键创新点是:
(1)将雷达图像转换成概率图,为每个像素计算反射概率,作为提升网络的监督信号。
(2)自定义的交叉熵损失函数,将像素分成三类:反射点像素、主瓣像素、噪声像素,并给予不同的权重,以强制网络缩小PSF的主瓣和副瓣。
3.2 检测网络
检测网络使用UNet架构,输入是提升网络的输出图像。检测网络输出每个格子的目标类别分数和2D包围框参数。
4 实验和结果
在RADDet和CARRADA两个公开数据集上评估了BoostRad的性能。如表1所示,BoostRad的性能明显优于RADDet、U-Net等多个基准方法。
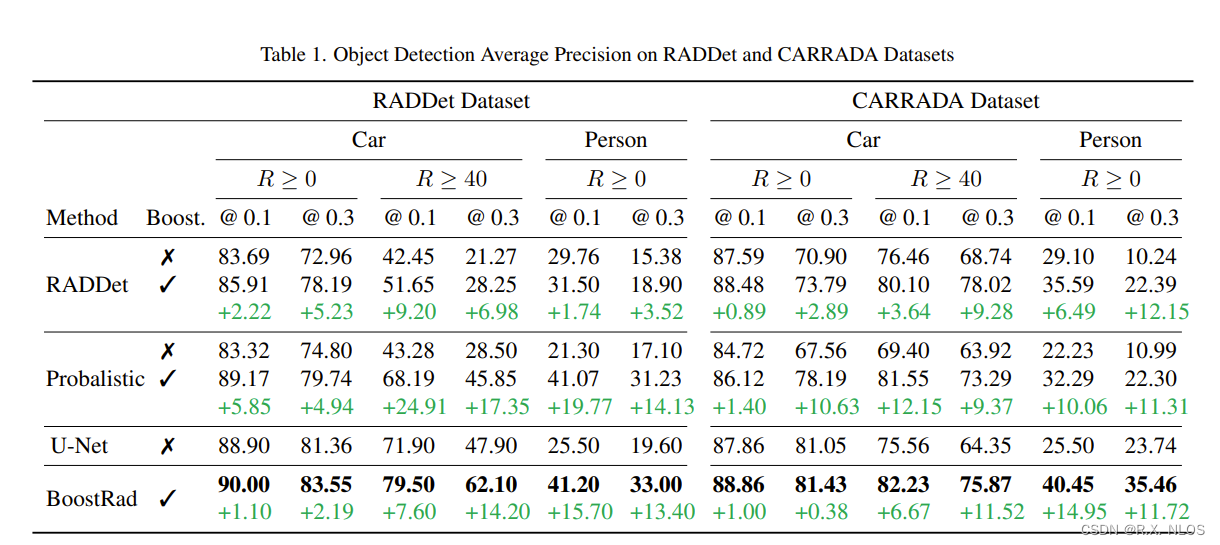
图:BoostRad与基准方法的性能比较。
还进行了提升网络的组件分析,结果证明提出的概率图和定制的损失函数,对获得更好的提升效果非常重要。
此外,发现端到端方法的性能也可以通过提升网络的提升得到改善。这说明目标检测是一个可以分阶段进行的任务,先提升图像质量,再进行检测,这样可以获得更好的效果。
5 不足和展望
本文的一个局限是提升网络是在合成数据上训练的,其泛化能力还有待验证。未来工作可以考虑在真实雷达数据上微调提升网络。
另一个可能的改进方向是将提升网络和检测网络结合成一个端到端的框架,实现联合训练。
6 总结
本文提出了BoostRad方法,使用DNN缩小雷达图像的PSF,从而提升后续的目标检测性能。实验结果表明,这种多阶段方法可以优于端到端方法。同时,合成数据的使用为雷达图像算法的研究提供了新的思路。


















 559
559

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











