




电磁悬浮模糊pid控制
磁悬浮是利用电磁吸力来克服重力将物体稳定悬浮在空中的技术,是一门综合材料学、电磁学、控制理论、电力电子技术、信号处理以及计算机科学等众多领域的边缘学科,技术含量高,应用前景十分广阔。而电磁悬浮系统则是研究磁悬浮技术的平台,研究并设计使悬浮体稳定悬浮的技术不仅对磁悬浮技术的深入研究做出一定的贡献,而且对其他不稳定系统的控制设计也具有一定的借鉴和参考价值。
本文在介绍了电磁悬浮控制系统的基本原理基础,建立了电磁悬浮控制系统的位置和电磁控制电压关系的数学模型,并采用了复合模糊控制器设计了磁悬浮控制系统,在Matlab/ Simulink下进行了仿真实验,并取得了令人满意的仿真结果,最终实现了电磁悬浮系统的稳定悬浮。
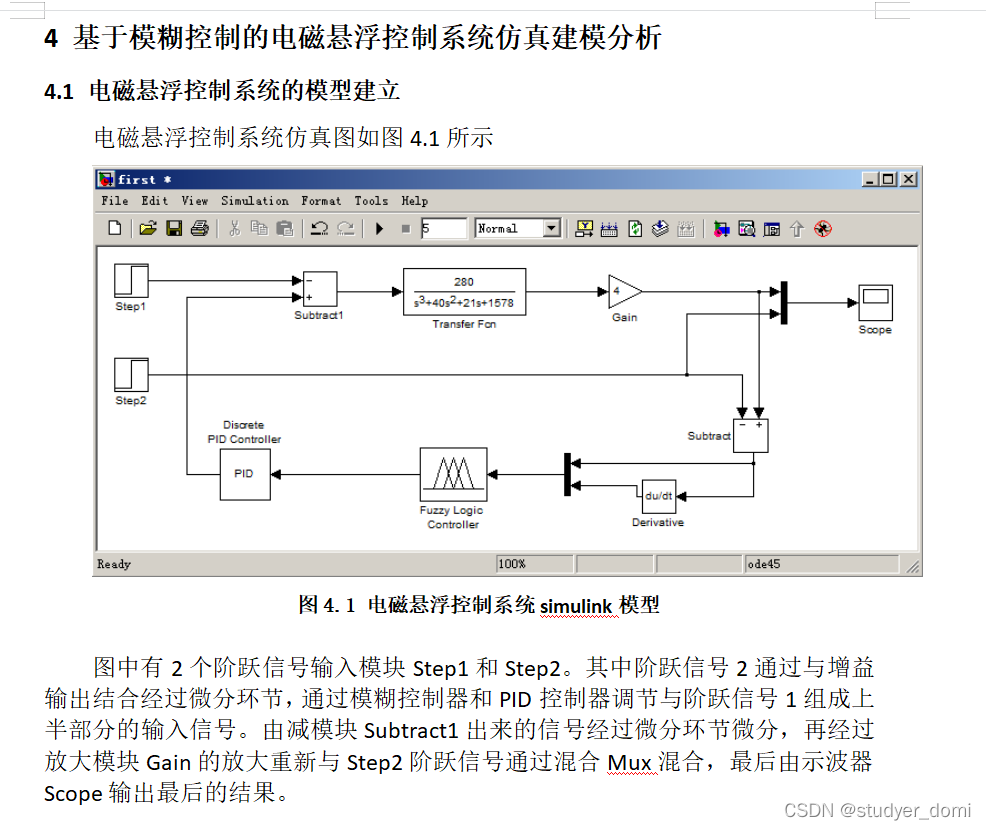
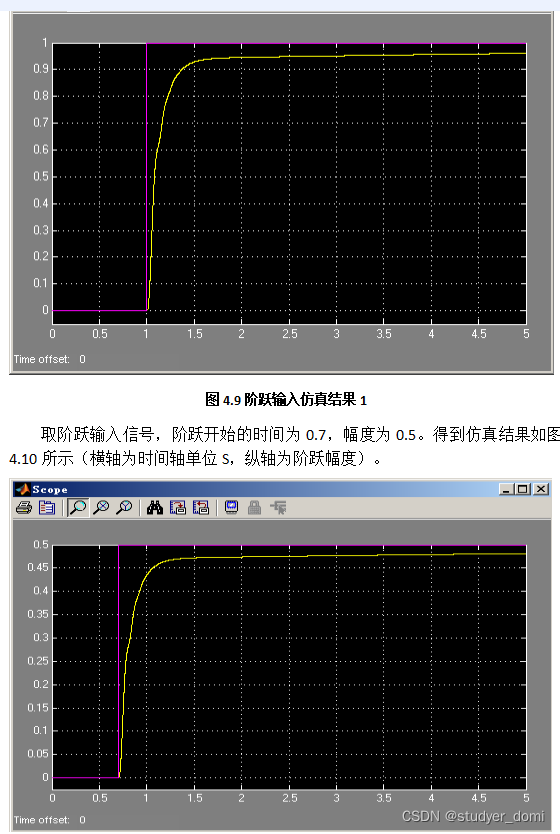
通过Simulink的仿真可以看出:复合模糊控制实现的磁悬浮控制系统效果很好。所设计的模糊PID串联控制器具有很好的控制性,曲线平滑,稳态误差小,在平衡点阶跃1附近无震荡,受干扰变化小。经过多次调试, 证明其系统稳定可靠。动态性能和静态刚度都达到了较好的效果。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









