







 该研究开发了一套基于中枢模式发生器(CPG)的电刺激(FES)康复系统,用于帮助下肢瘫痪病人进行行走训练。通过调整CPG模型的参数,影响关节运动的幅度、频率和相位,实现了对双腿髋关节和膝关节的控制。实验结果显示,受试者的行走运动与正常人自主行走表现出定性一致,验证了系统的可行性和有效性。
该研究开发了一套基于中枢模式发生器(CPG)的电刺激(FES)康复系统,用于帮助下肢瘫痪病人进行行走训练。通过调整CPG模型的参数,影响关节运动的幅度、频率和相位,实现了对双腿髋关节和膝关节的控制。实验结果显示,受试者的行走运动与正常人自主行走表现出定性一致,验证了系统的可行性和有效性。
1、内容简介
研发功能性电刺激(
FES
) 康复系统来实现下肢瘫痪病人的行走运动
。
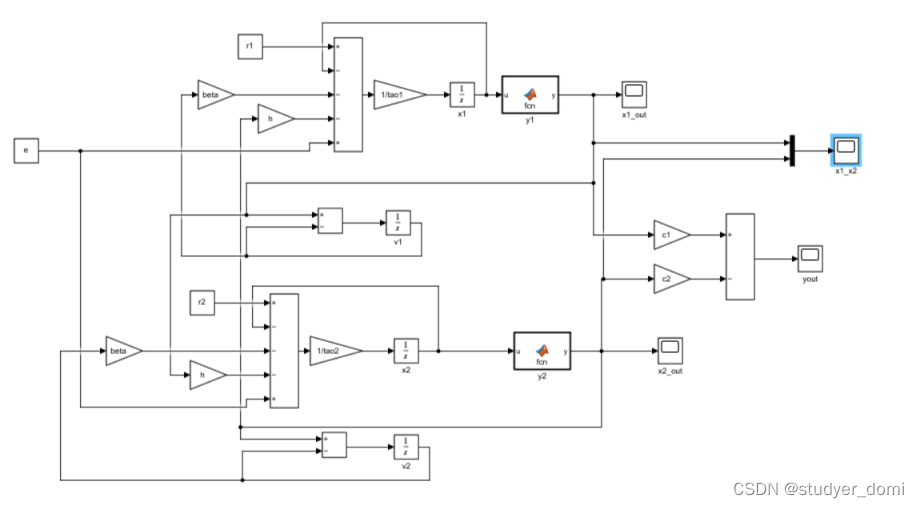
控制器采用基于中枢模式发生器 ( CPG
) 的仿生控制机理
。
针对基于递归神经振荡器的
CPG
模 型,研 究 关 键 参 数( 激 励 性 输 入
、
时 间 常 数
、
感 觉 反 馈、
输出阈值) 对
CPG
输出幅值
、
频率
、
相位以及占空比的影响
。
建立包含
12
个神经元的
CPG
网络,以控制双腿的 4 个关节( 左
/
右髋关节和膝关节) 和八组肌群( 左
/
右髂腰肌
、
臀 大 肌
、
股直肌和腘绳肌)
。
所搭建的实验系统和平 台,包括悬吊减重系统、
助行系统
、
电刺激系统和运动检测系统
。
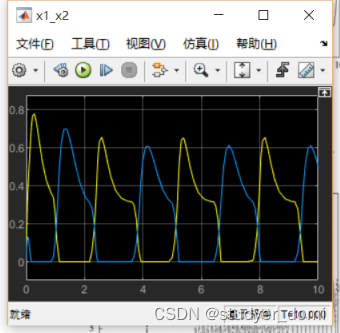
在正常受试者参与的实验中,受试者在
CPG
控 制
的电刺激作用下产生非自主行走运动
。
实验结果表明,受试者双腿的髋关节和膝关节角度与正常人自主行走时的 数据达到定性吻合,验证所设计的 CPG
控制器在
FES
康复系统中的可行性与有效性
。
2、内容说明
略
3、仿真分析
4、参考论文
基于中枢模式发生器控制的电刺激步行康复系统设计与实验

















 741
741

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









