







 本文介绍了AVM(Around View Monitor)全景环视系统和APA(Auto Parking Assist)自动泊车辅助功能。AVM利用四摄像头传感器提供360度视野,而APA在AVM基础上结合更多传感器实现自动泊车。文章详细阐述了AVM的畸变校正、内外参标定和图像拼接过程,以及APA的泊车控制器设计,包括障碍物检测、路径规划和碰撞预测。
本文介绍了AVM(Around View Monitor)全景环视系统和APA(Auto Parking Assist)自动泊车辅助功能。AVM利用四摄像头传感器提供360度视野,而APA在AVM基础上结合更多传感器实现自动泊车。文章详细阐述了AVM的畸变校正、内外参标定和图像拼接过程,以及APA的泊车控制器设计,包括障碍物检测、路径规划和碰撞预测。
目录
一、前言
AVM:Around View Monitor 全景环视系统,也叫360影像,低速摄像头ADAS,目前已经比较成熟,在很多OEM设计车型中已成为一种标配的泊车驾驶辅助功能。使用前后左右四摄像头传感器,包括联合标定、视图切换、视图投影、图像拼接、3D渲染、静态动态轨迹线描绘等技术。
APA: AutoParkingAssist 自动泊车辅助功能,一般中高端车型搭配该功能。使用前后左右摄像头及12超声波传感器,包括AVM技术、车位检测、目标识别、碰撞预测、轨迹规划、轨迹跟踪、HMI等技术。
AVP:AutomatedValetParking代客泊车系统,用户可以通过APP来召唤车辆和自主泊车功能,属于市内L4低速自动驾驶技术,使用摄像头、激光、毫米波、IMU、5G等传感器,包括感知环境,目标融合、定位、全局局部路径规划、跟踪控制等技术。
AVM到AVP是辅助驾驶从低级别到高级别的演进,也是一般产品研发规划路线图。
二、AVM概述
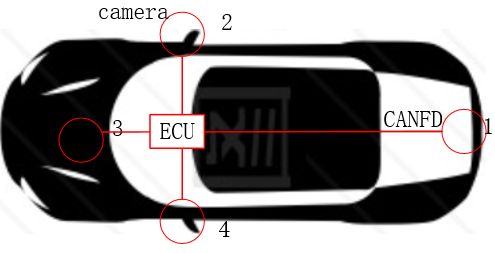
传感器布局如下,前后左右四路摄像头输入广角图像,输出Top视图及其他虚拟视角图像:
AVM基本算子如下
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 697
697

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









