







基于YOLOv11的施工现场安全防护装备检测系统的详细介绍,结合其技术原理、应用场景与优化策略:
一、背景与意义
在建筑行业中Safety,安全帽、反光背心等个人防护装备(PPE)的佩戴是保障工人生命安全的核心措施。然而,传统人工监管存在效率低、易疏漏等问题。据统计,约60%的施工现场事故与未正确佩戴PPE相关。基于计算机视觉的自动化检测系统应运而生,而YOLOv11凭借其高效实时性和多任务支持能力,成为该领域的主流解决方案。例如,西安某钢结构施工项目通过部署YOLOv11系统,9个月内工人进入高风险区域的次数显著减少,验证了其有效性。
二、技术方案与核心创新
1. 模型架构优化
YOLOv11在目标检测任务中引入了多项改进:
- DRBNCSPELAN模块:通过深度可分离卷积与残差连接优化特征提取,提升小目标(如安全帽扣带)的检测精度。
- 多任务支持:支持目标检测(如安全帽识别)、实例分割(精确分割未佩戴区域)和旋转边界框(OBB)检测(适应倾斜视角)。
- 轻量化设计:相比YOLOv8,参数减少22%,推理速度提升2%,在RTX 3060 GPU上可实现每秒60帧的实时检测。
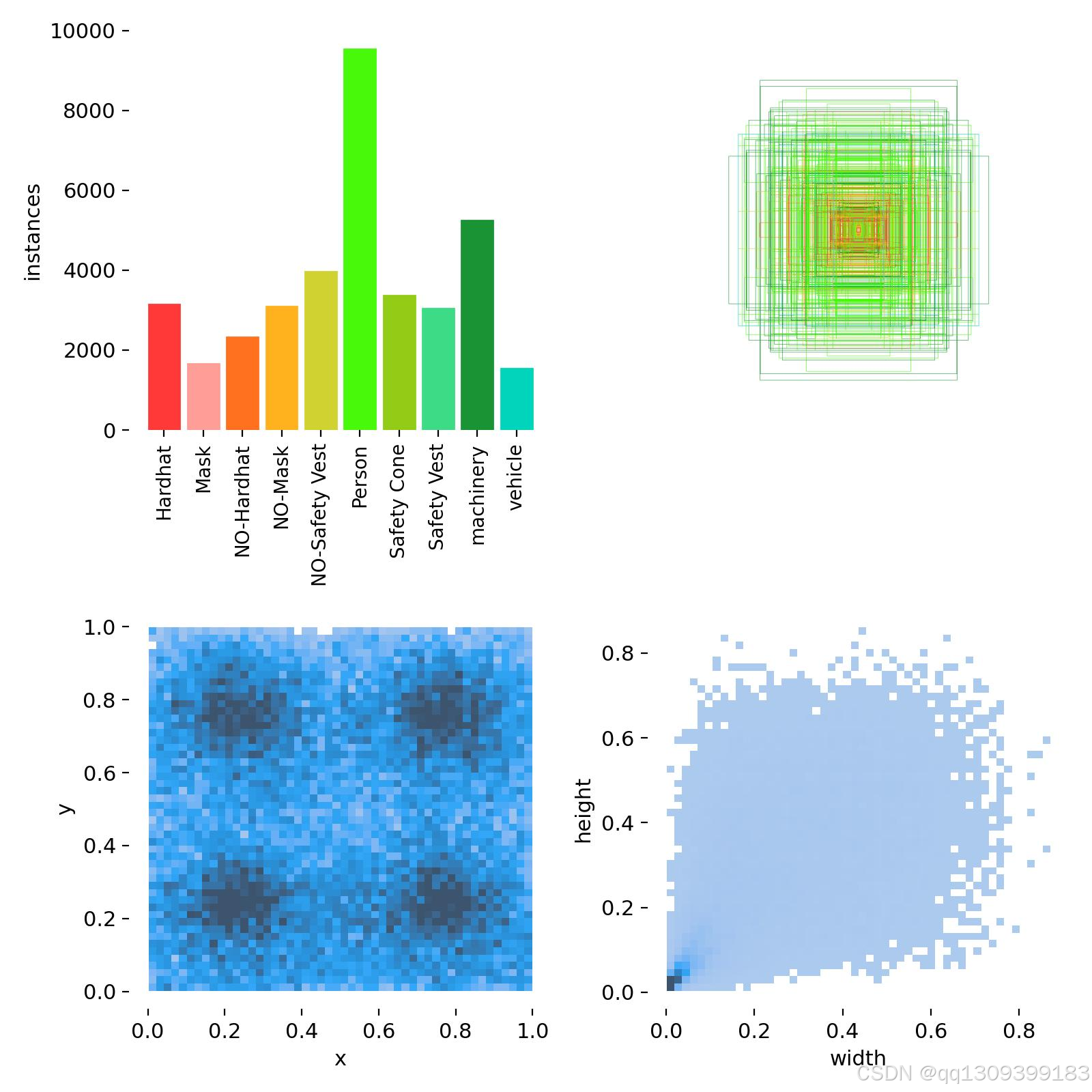
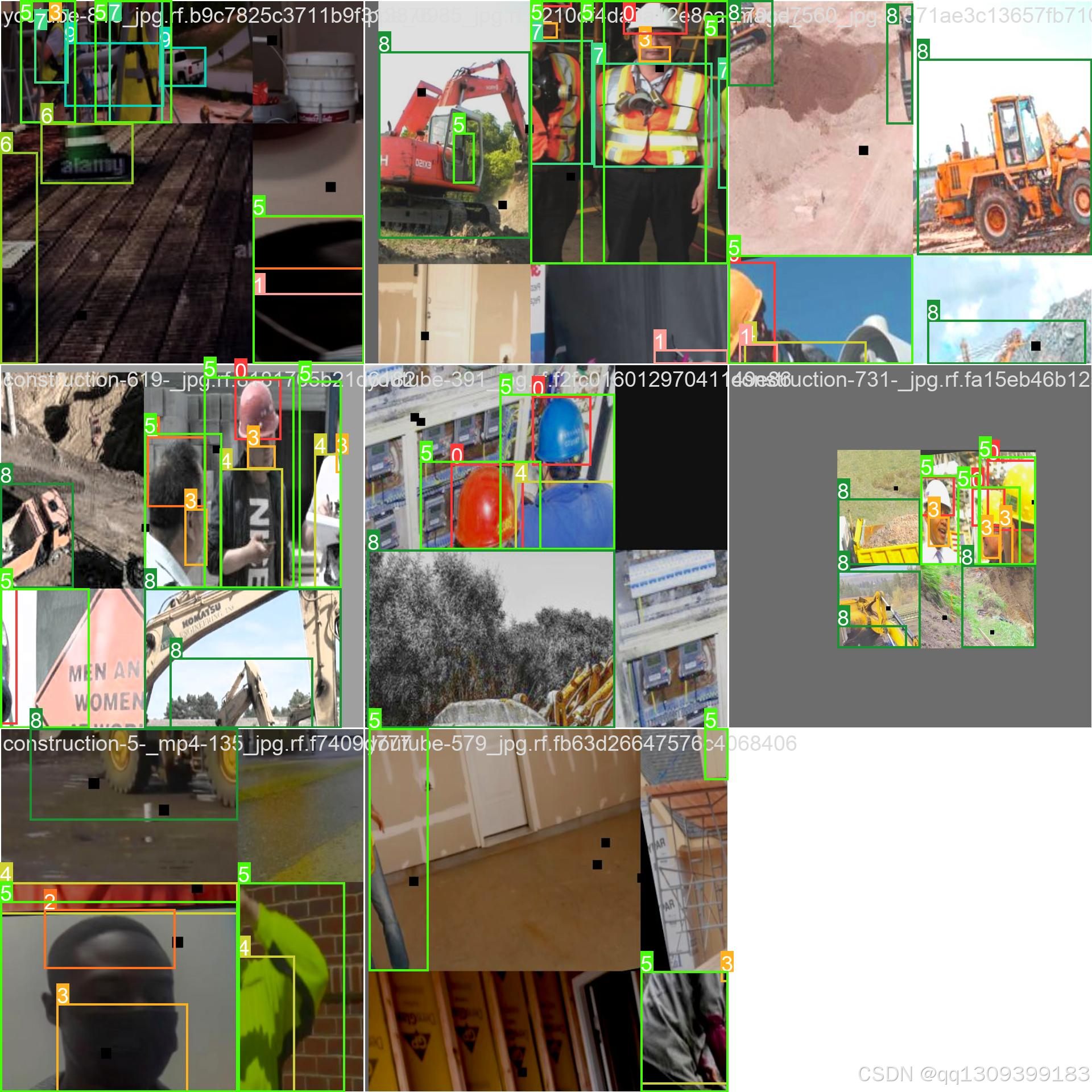
2. 数据集构建与训练策略
- 数据集特性:专用数据集包含4个类别(安全帽、反光背心、未佩戴安全帽、未佩戴背心),涵盖不同光照、角度及复杂背景场景,共204张图像,标注精度达像素级。
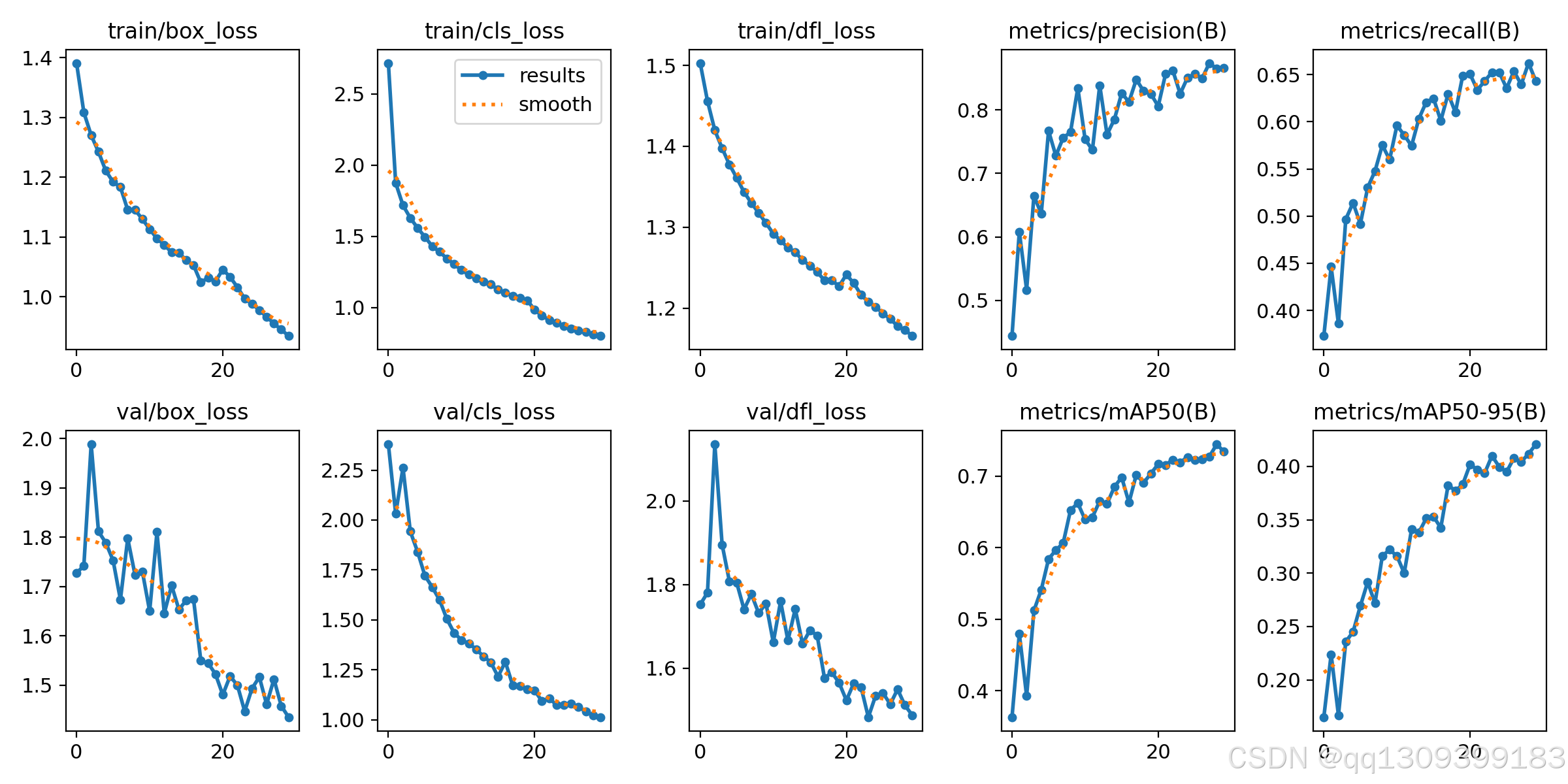
- 训练优化:采用动态学习率调整与数据增强(如Mosaic增强),在COCO预训练模型基础上微调,最终mAP@50达0.994,召回率0.957,满足高精度要求。
3. 系统集成与部署
- 多模态输入:结合摄像头与红外传感器,实现全天候监控。通过透视变换将图像坐标映射至三维空间,精确计算工人与危险区域的距离。
- 边缘部署:利用TensorRT加速引擎,将模型转换为.engine格式,在Jetson Nano等边缘设备上实现低延迟推理,CPU利用率降低30%。
三、实际应用与效果验证
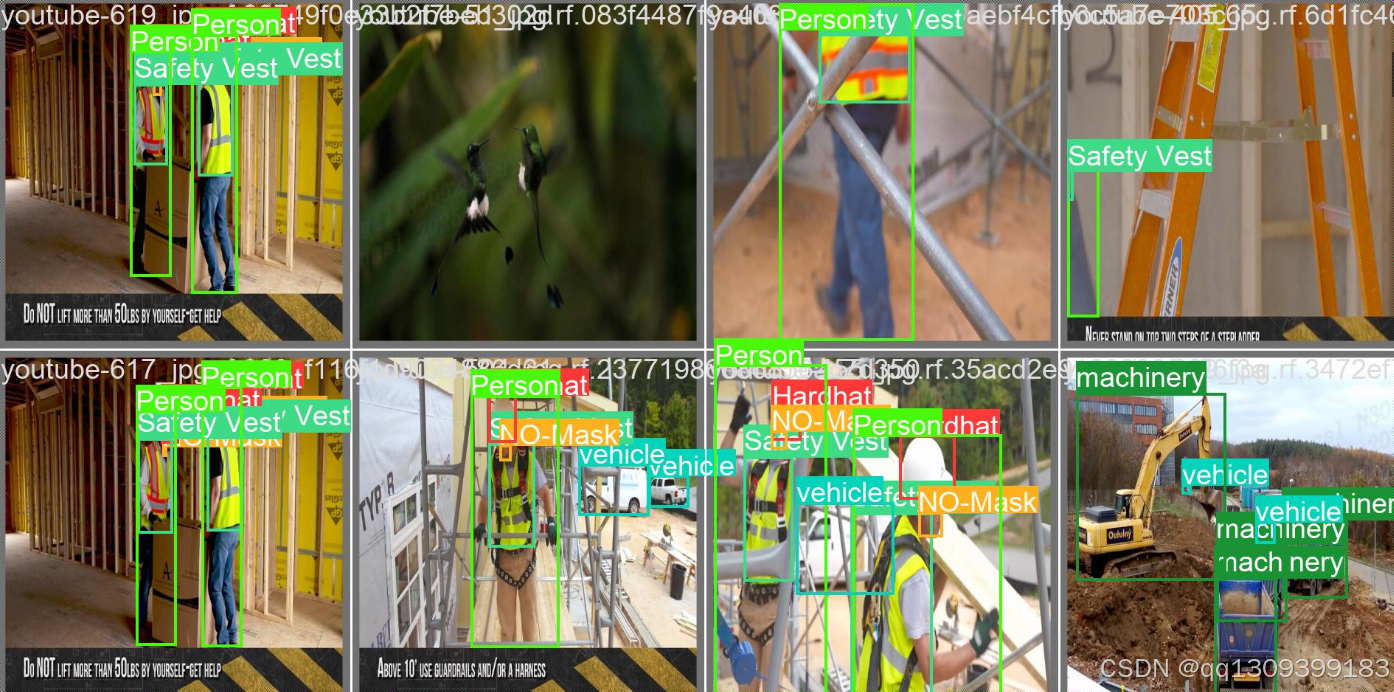
1. 功能模块
- 实时检测与告警:系统通过视频流分析,实时标注未佩戴安全装备的工人,并触发声光报警。支持图片、视频及摄像头多源输入。
- 数据可视化:集成三维管理平台,显示风险区域热力图与历史违规记录,辅助安全决策。
- 离线分析:识别结果自动导出为CSV报告,包含时间戳、位置坐标及违规类型,便于事后追溯。
2. 性能指标
- 检测精度:在20米范围内,工人定位的平均绝对误差(MAE)为67.44毫米,均方根误差(RMSE)86.16毫米,满足施工场景需求。
- 鲁棒性测试:在强光、雨雾等干扰环境下,系统召回率仍保持90%以上,误报率低于5%。
四、挑战与未来方向
1. 当前局限性
- 遮挡问题:密集人群或设备遮挡可能导致漏检,需结合多视角摄像头或雷达数据融合。
- 类别扩展:现有系统仅支持4类PPE检测,未来可扩展至安全带、护目镜等更多装备。
2. 优化路径
- 自适应模型压缩:通过知识蒸馏技术,进一步压缩模型体积,适配低算力设备。
- 跨场景迁移学习:利用合成数据(如Unity模拟工地环境)提升模型泛化能力。
五、结论
YOLOv11通过架构优化与多任务集成,显著提升了施工现场安全防护装备的检测效率与精度。其轻量化设计和高扩展性使其成为工业安全智能化的关键技术。未来,结合5G传输与数字孪生技术,该系统有望实现全生命周期安全管理,推动建筑行业向“零事故”目标迈进。
参考文献


















 1081
1081

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









