










Turtlebot包安装
安装Turtlebot,打开终端,运行如下命令:
sudo apt-get update
sudo apt-get install ros-indigo-turtlebot ros-indigo-turtlebot-apps ros-indigo-turtlebot-interactions ros-indigo-turtlebot-simulator ros-indigo-kobuki-ftdi ros-indigo-rocon-remocon ros-indigo-rocon-qt-library ros-indigo-ar-track-alvar-msgs测试Turtlebot安装
在终端输入:
roscore打开一个终端,输入以下命令:
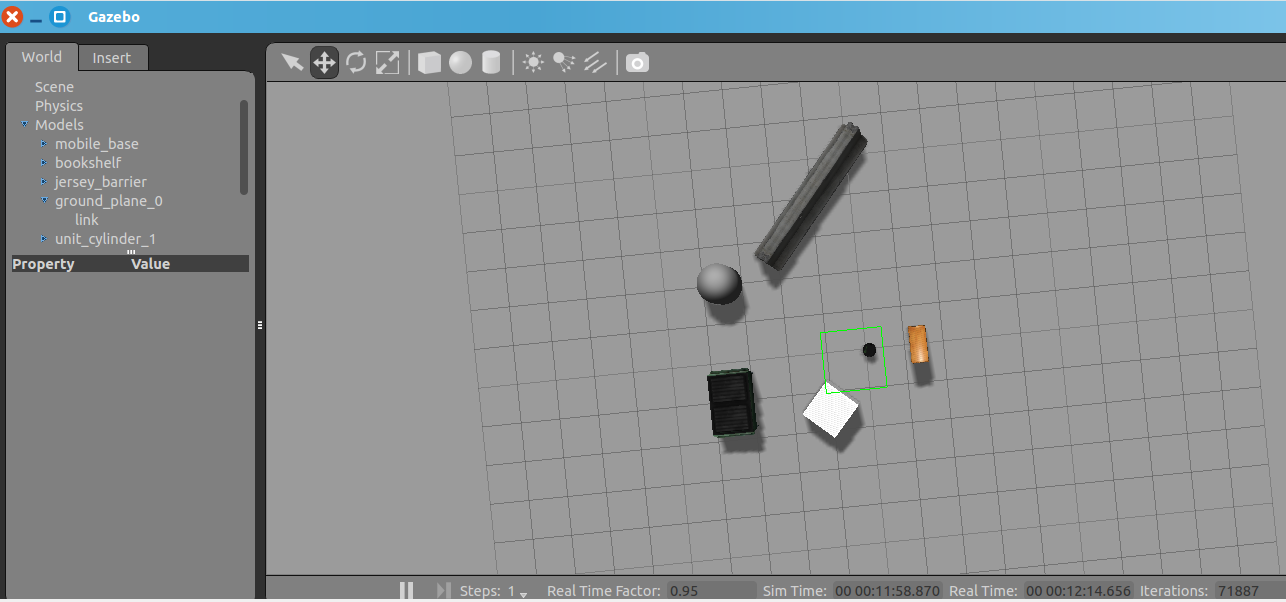
roslaunch turtlebot_gazebo turtlebot_world.launch你会看到一个环境,称为Gazebo的世界,与turtlebot和其他一些对象。场景是模拟器的主要部分,对象是动态的,你可以与环境进行交互。
运行rviz
rviz是ROS的三维可视化环境。rviz让我们看到什么机器人看,思考和做。可视化和测井传感器信息是开发和调试的一个重要组成部分。
而Gazebo是运行在一个新的终端,推出Rviz:
roslaunch turtlebot_rviz_launchers view_robot.launch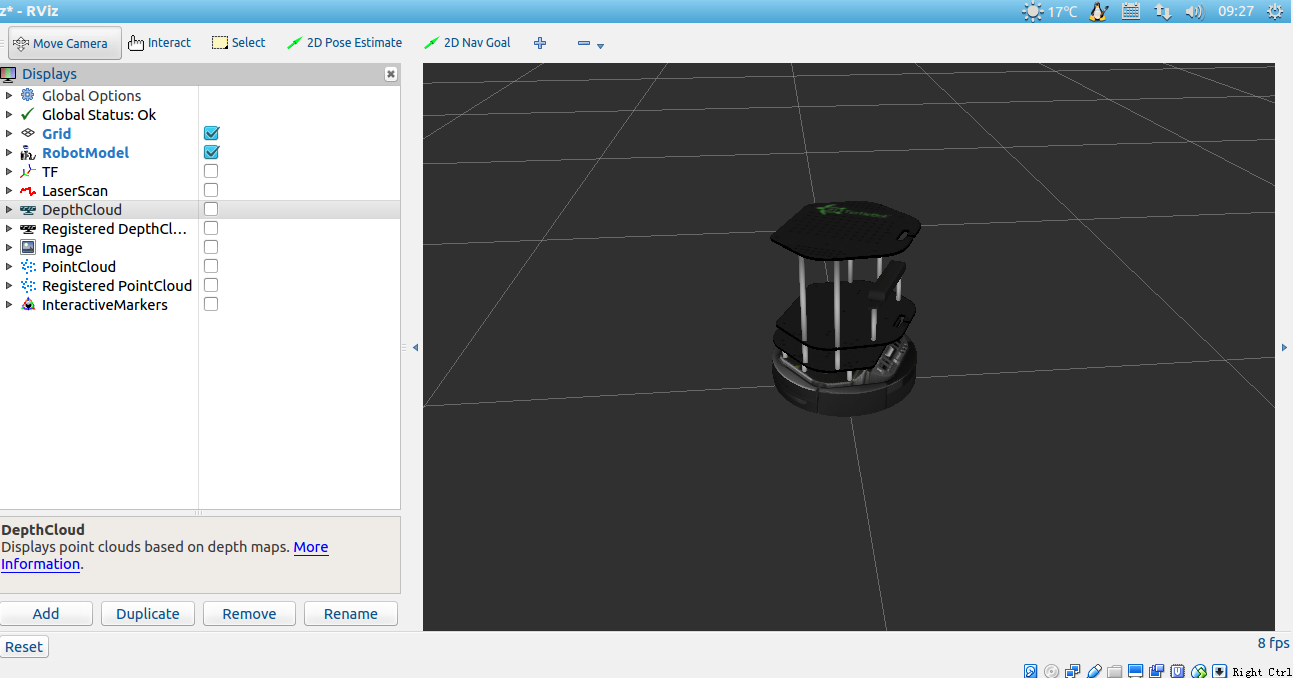
你可以在图片上使用一个轮式鼠标导航。
按照下面的步骤:
旋转相机,使你可以看到背后的turtlebot。
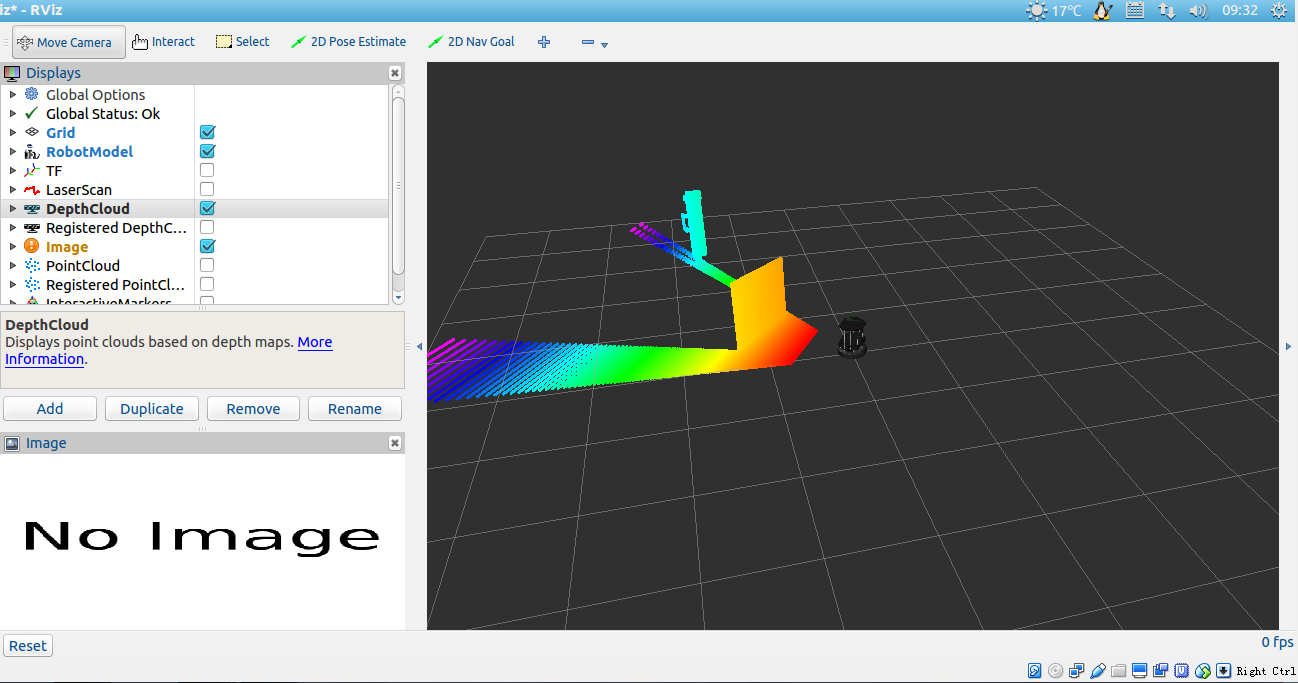
左侧栏选项DepthCloud 打勾,你会看到turtlebot的深度视觉。
启用Image左栏的图像选项。注:你可能会看到一个警告。由于图像的默认主题不支持通过仿真实现。左下角你可以看到一个图像警告。转到下一步选择合适的主题。
键盘遥控
在Gazebo和Rviz正在运行,打开一个新的终端运行:
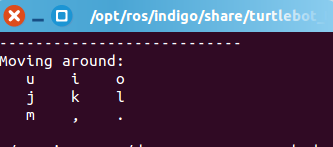
roslaunch turtlebot_teleop keyboard_teleop.launch通过在这个shell中控制键盘如下键来驱动Rviz中的仿真机器人模型
互动标记
先检查已安装的交互标记包:
sudo apt-get install ros-indigo-turtlebot-interactive-markers在Gazebo和Rviz运行的同时,打开一个新的终端运行:
roslaunch turtlebot_interactive_markers interactive_markers.launch按如下步骤:
从左栏启用Interactive Markers互动标记选项。
在屏幕顶部的工具面板中选择Interact 交互工具。你会看到蓝色的戒指和红色的箭。
拖动红色箭头来驱动turtlebot向前和向后。
拖蓝圈转动的turtlebot。
您也可以同时拖动蓝色环旋转和驱动器。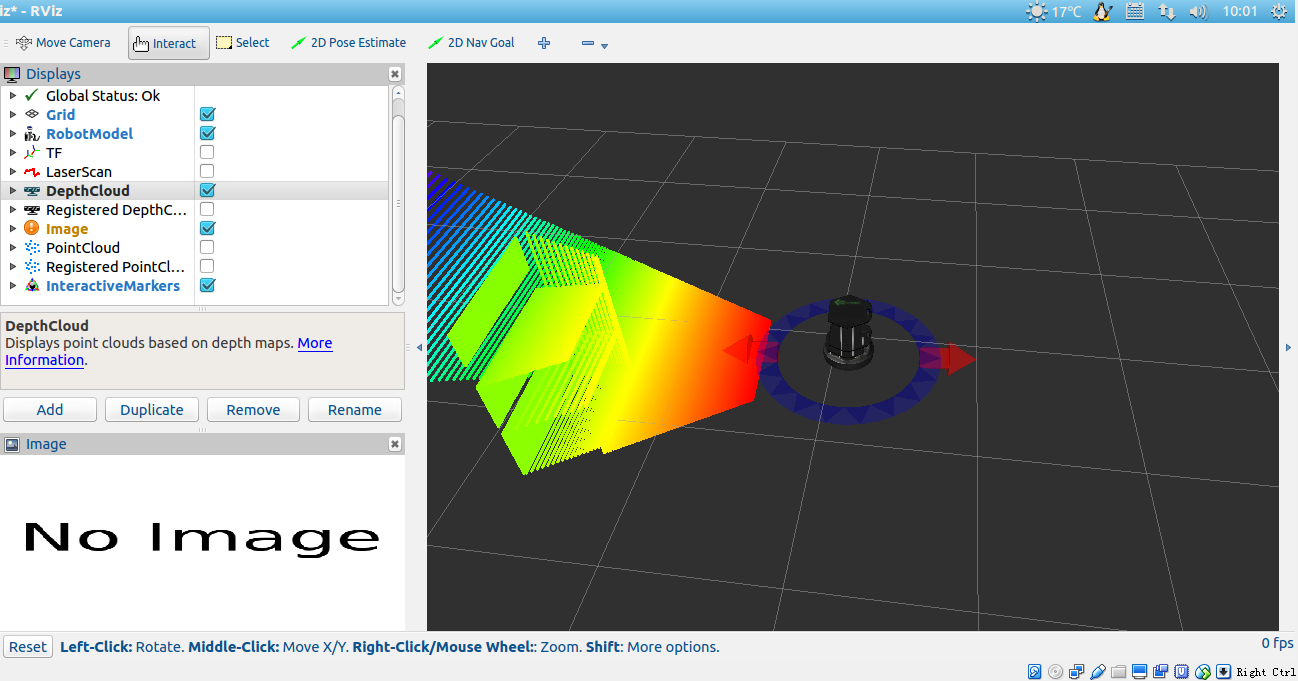

















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











