






目录
FXV2750硬件开源内容
名称:青龙。
型号:FXV2750。
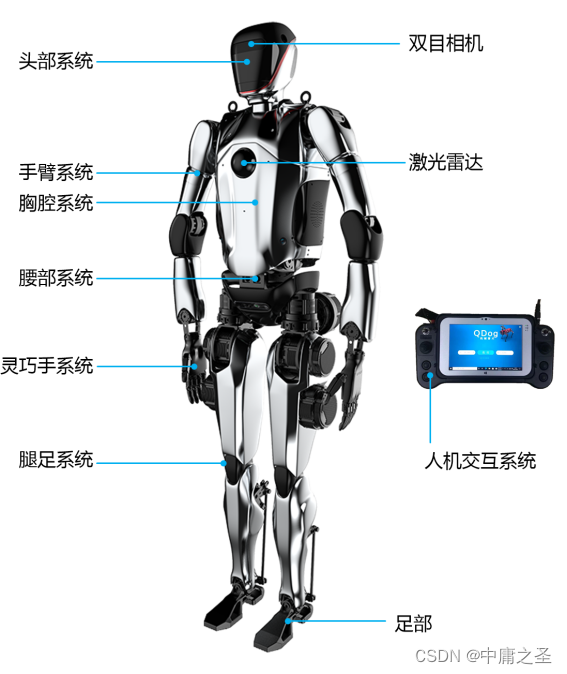
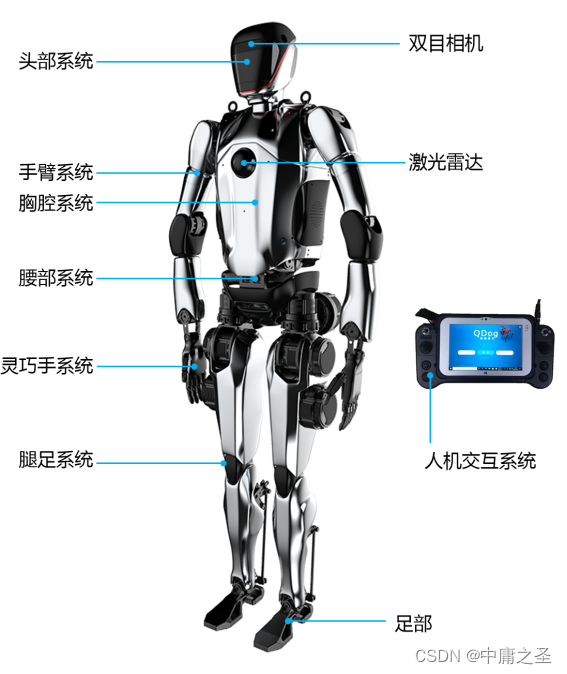
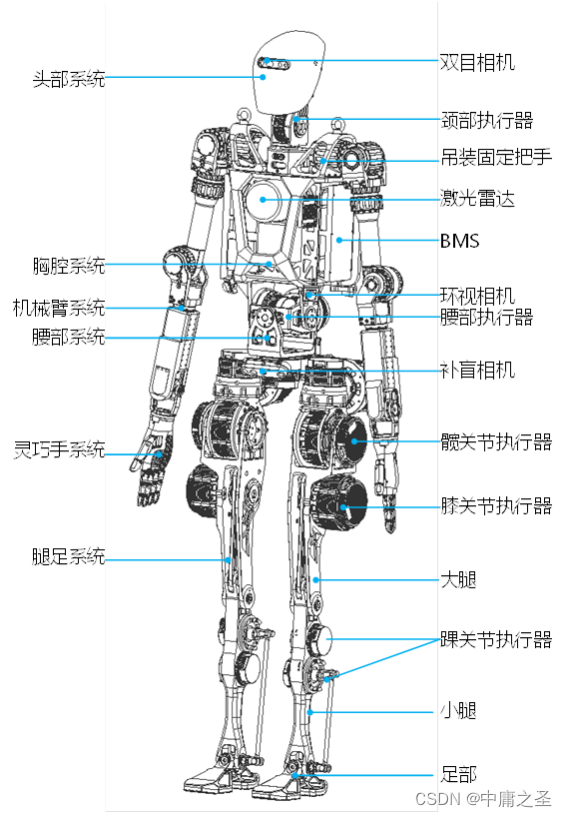
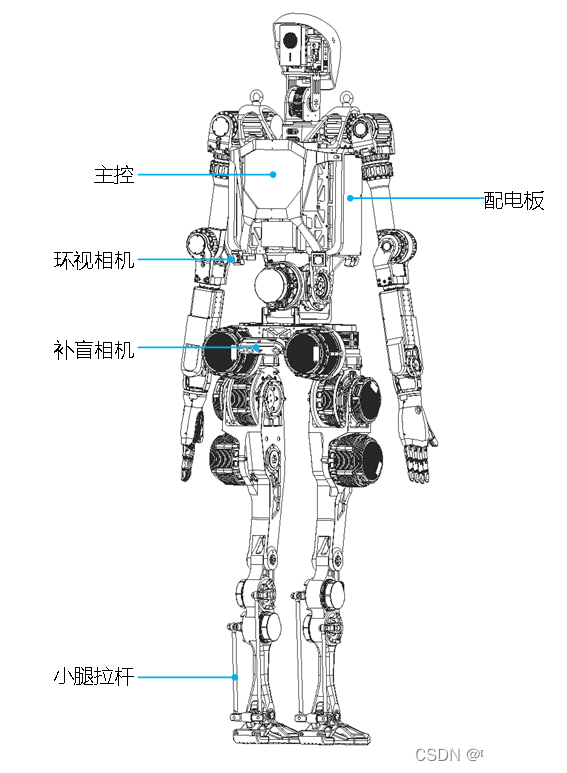
通用人形机器人FXV2750拥有高度仿生的躯干构型和拟人化的运动控制,全身最多达43个全身自由度,最大关节峰值扭矩达396N.m,具备快速行走、敏捷避障、稳健上下坡、抗冲击干扰等运动功能,是通用人工智能的理想载体。整体系统组成如图所示。
通用人形机器人FXV2750强对标生物人功能指标,包括外观(头部、胸腔、手臂、灵巧手、腰部、腿足)、外形尺寸、关节运动范围、机动、感知、交互、作业等。
a)
b)
c)
(1)整体布局
强对标人类关节尺寸及关节运动范围;
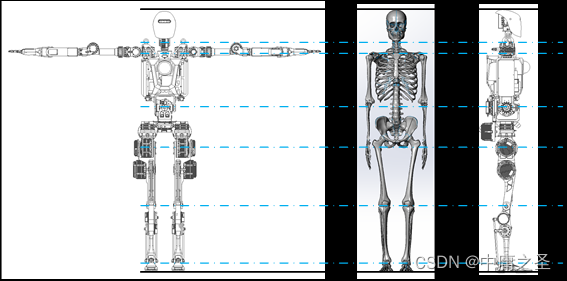
图 2关节尺寸对比图
强对标人感知系统,包括视觉、听觉、触觉、嗅觉和动觉;
(2)机械臂
强对标人类臂的高灵巧性。有效工作半径大、关节运动范围大、末端法兰与转轴距离短、负载自重比高。
臂手总线统一为EtherCAT,线路简洁。
图 3机械臂示意图
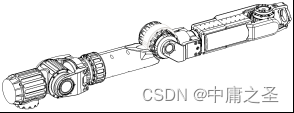

表 1机械臂总体技术参数
| 序号 | 内容 |
| 1 | 单臂自由度7个,臂展600mm |
| 2 | 机械臂负载能力:≥3kg;双臂搬运负载≥5kg |
| 3 | 自重≤5.7kg |
| 4 | 重复定位精度优于±0.2mm |
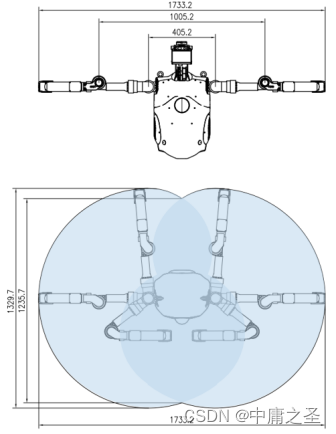
图 4机械臂操作空间示意
(3)仿人灵巧手
本仿人灵巧手分左手和右手,采用模块化设计,本采用模块式可拆卸结构,实现与人形机械臂的快拆快换。每个手指/拇指指尖、手掌部分集成阵列式触觉传感器,可实现精确的接触感知。整体外观设计参考人手及实际抓取需求,与人手近似,简约美观。
具备高抓重比与抓取自适应的特点,响应速度快、运动灵活、外形高度仿人手;
采用快换机构,方便与机械臂的拆装;
具备触觉感知能力,手指采用模块化原则设计。
 右手
右手
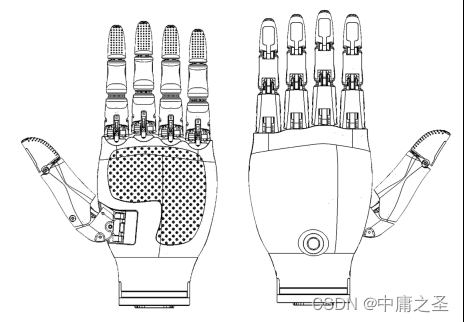
左手
图 5灵巧手示意图
表 2灵巧手总体技术参数
| 序号 | 内容 |
| 1 | 本体有19个自由度,6个主动自由度,拇指有3个自由度(2个主动自由度),可实现主动弯曲伸展与主动侧向摆动,四个手指均有4个自由度(1个主动自由度),可实现主动弯曲伸展与被动侧向摆动 |
| 2 | 整手重量不超过600g |
| 3 | 速度(手指运动):90度/S |
| 4 | 响应速度:10ms |
| 5 | 单指负载不小于15N |
| 6 | 整手负载(四指握拳式)不小于5kg |
| 7 | 额定电压:8.4V |
(4)底层驱动:
基于EtherCAT总线的底层驱动,具有实时性高、扩展性强、可靠性高的特点,提供关节层控制接口,可实现对机器人的每一个关节的力矩、位置、速度控制。
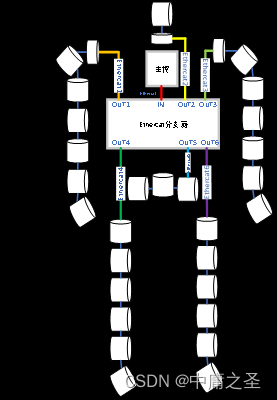
图 6基于Ethercat的高实时总线系统
表 3总体参数表
| 参数 | |
| 外形尺寸 | 直立尺寸:2192mm*1816mm*300mm,如图所示。 |
| 重量 | 83kg |
| 载重 | ≥20kg |
| 主动自由度 | 43个 |
| 行走速度 | ≥5km/h; |
| 腰部 | 具备类人手外形,用于3自由度 |
| 手臂 | 1)单臂自由度7个,臂展600mm 2)机械臂负载能力:≥3kg;双臂搬运负载≥5kg 3)自重≤5.7kg 4)重复定位精度优于±0.2mm |
| 灵巧手 | 1)具备类人手外形,单手主动自由度 2)灵巧手手指指尖输出力≥30N,手指最大运动速度优于90°/s,整手负载≥5kg |
| 续航时间 | ≥3小时 |
| 电池容量 | ≥30Ah,电压72V |
| 控制和感知算力 | Up to 400 TOPS |
| 感知传感器配置 | 3D激光雷达 深度相机 语音模块 嗅觉传感器 环视全景相机 |
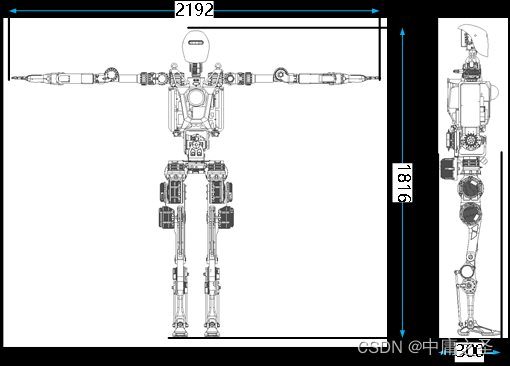
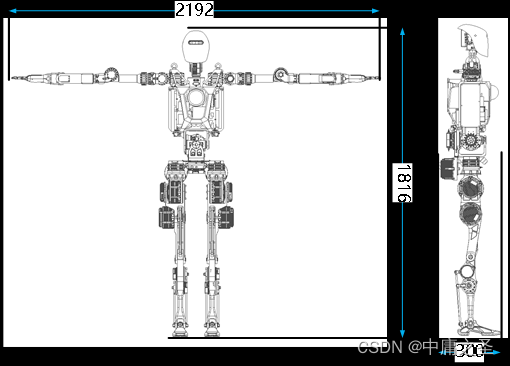
图 7外形尺寸
表 4整体自由度配置
| 序号 | 关节名称 | 自由度 |
| 1 | 头部 | 2 |
| 2 | 腿 | 6*2 |
| 3 | 腰部 | 3 |
| 4 | 手臂 | 7*2 |
| 5 | 灵巧手 | 6*2 |
| 合计 | 43 | |
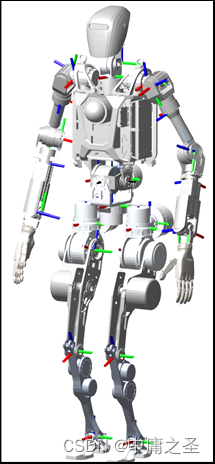
图 8自由度配置示意简图
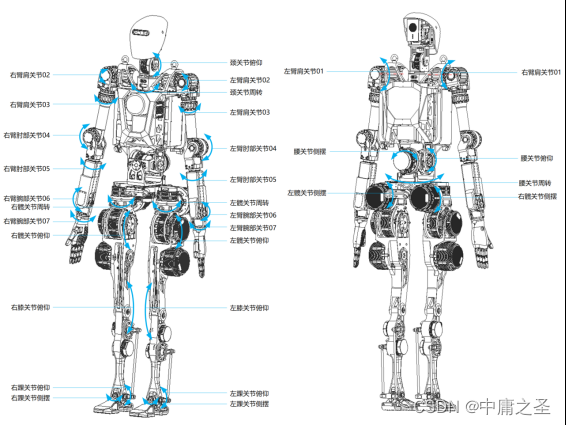
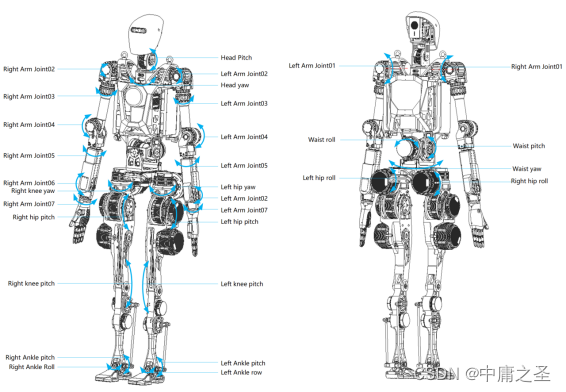
图 9整体运动关节示意图
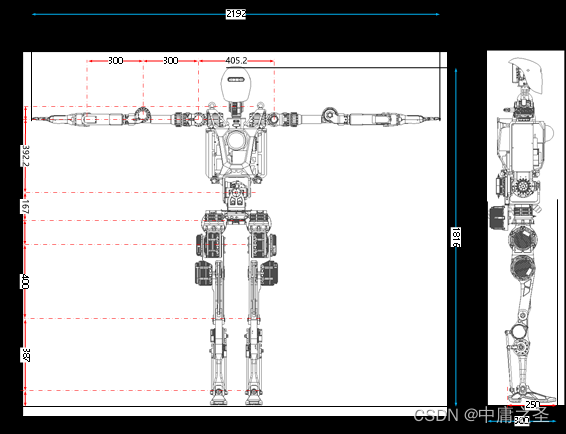
图 9整体关节尺寸示意图
表 5关节运动范围 单位(°)
| 序号 | 名称 | 参数 | |
| 1 | Ankle pitch | 踝关节俯仰:-30°~+60° |  |
| 2 | Ankle row | 踝关节侧摆:-25°~+25° |  |
| 3 | knee pitch | 膝关节俯仰:-120°~+5° |  |
| 4 | hip pitch | 髋关节俯仰-45°~+105 | 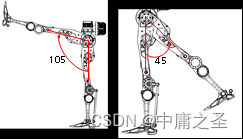 |
| 5 | hip row | 髋关节侧摆 -10°~+25° |  |
| 6 | hip yaw | 髋关节周转-40°~+40° |  |
| 7 | waist pitch | 腰关节俯仰:-17°~+45° |  |
| 8 | waist row | 腰关节侧摆:-40°~+40° |  |
| 9 | waist yaw | 腰关节周转:-45°~+45° |  |
| 10 | Head pitch | 颈关节俯仰±45° | 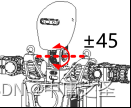 |
| 11 | Head yaw | 颈关节周转±90° |  |
| 12 | ArmJoint1 | 肩关节俯仰±170° |  |
| 13 | ArmJoint2 | 肩关节侧摆±105° | 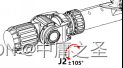 |
| 14 | ArmJoint3 | 肩关节周转±170° | 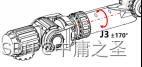 |
| 15 | ArmJoint4 | 肘关节展折0~170° |  |
| 16 | ArmJoint5 | 肘关节旋转±170° | 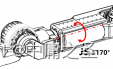 |
| 17 | ArmJoint6 | 腕关节俯仰±105° |  |
| 18 | ArmJoint7 | 腕关节侧摆±60° |  |
(1)小跑速度:≥5km/h;
(2)快跑速度:≥9km/h;
(3)地形适应能力:满足平地、碎石、沙土等自然地形;
(4)可上下13cm台阶和20度斜坡;
(1)单臂自由度7,工作半径≥600mm,肘关节折叠角度可达170°,末端法兰与末端旋转中心距离≤64mm,整臂灵活工作空间大。
(2)单臂平举负载≥3kg,最大负载≥5kg
(3)双臂搬运负载≥10kg
(4)重复定位精度优于±0.2mm
(5)直臂状态下,外包络直径≤Φ109,整臂具有良好的狭窄空间作业能力
(1)具备目标识别、全景环视、三维重构能力
(2)具有融合视觉的自主行为能力;
(3)具备自主避障、自主路径规划、自主抓取能力;
(4)具备自主开门、乘自动扶梯和电梯能力,可在有门、门槛、楼梯、电梯等设施的室内环境中自主通行
1)具有深度视觉传感器;
2)具有听觉传感器与基础语音对话能力;
3)头部2自由度可转动;
4)具有表情交互能力;
5)具有目标识别处理能力;
1)具有自主导航与三维地图构建能力;
2)具有局部环境地图构建能力;
3)具有环视上帝视角或全景图像回传能力;
4)具有嗅觉感知能力;
1)具有指尖感知触觉感知能力
(1)可与人进行手递手物品交接;
(2)可在≥3大类场景中自主移动作业,作业技能不少于3种;
(3)能够完成包括但不限于螺纹装配、扎带束线、电连接器接插等操作,在生产线上不少于3种工站的操作效率不低于人工执行;
(4)能够完成坦克模拟驾驶作业。
(1)支持5G、WIFI6网联通讯
(2)可与人进行语音/肢体动作等拟人自然交互;
(3)支持远程沉浸式操控;
(4)支持多模态情感交互。
表 6关节型号及所属部位
| 所属部位 | 名称 | 峰值力矩(Nm) |
| 头部 | 颈部俯仰周转 | 26 |
| 腰部 | 俯仰关节 | 315 |
| 侧展关节 | 315 | |
| 周转关节 | 121 | |
| 腿部 | 髋关节侧展 | 320 |
| 髋关节周转 | 160 | |
| 髋关节前摆 | 396 | |
| 膝关节 | 396 | |
| 踝关节 | 104 | |
| 臂 | 肩关节1、2 | 80 |
| 肩3,肘4 | 58 | |
| 肘5,腕6、7 | 11.5 |
驱动电压11-95VDC;
电流≥130A(正弦波幅值);
电流环控制频率≥10Khz
电流环控制带宽≥2Khz;
通信频率≥1Khz;
额定功率下驱动器效率≥97%;
具有故障检测及故障上传,能识别电源欠压、过压,过流、过热,反馈异常,电机缺相等故障;
具有驱动器调试上位机,可实现对电机的电参数和机械参数(摩擦转矩、转动惯量等)的自动辨识,并自动整定控制参数;
通讯方式支持EThercat通信;
工作温度:-20℃ ~ +55℃;
额定电压 72V(19S)
能量 ≥30Ah
总重量 ≤9kg
额定电流 ≥60A
最大充电电流 ≥15A
最大放电电流 ≥120A(每400ms出现一次20ms峰值)
自放电率 ≤3%(/28天)
循环寿命 ≥1000(80%DOD)
连接内阻 ≤1.5mΩ(20℃,50%SOC时)
电池组的连接内阻低于电池内阻
工作环境温度 -20℃~55℃(放电),-20℃~45℃(充电)
电压一致性 ≤50mV(静态)
接口 外接充电接口(配充电器)
AI算力:Up to 400 TOPS
支持四路对外千兆以太网;
支持一路内置WIFI6功能 ;
支持一路内置MEMS传感器,采用UART接口与主控板进行通信;
搭载4G、GPS/北斗定位;
支持8路CAN总线;
USB3接口≥6路;
RS422通讯接口:1路,RS232通讯接口:1路;
工作温度:-20℃ ~ +60℃
存储温度:-40℃ ~ +80℃
振动:1~5Hz,2g
该雷达用于机器人三维环境地图的构建,为实现长时间可靠的自主导航与精确地图构建提供数据支撑。由于市面上没有人形机器人专用雷达,现有雷达尺寸较大因此导航用雷达拟布置与机器人脖子位置前方,对机体前方进行增量式地图构建并实现自主导航。
依据上述需求雷达布置与机器人胸前或脖子位置,则通过调研目前可以采用的速腾的Bpearl球面雷达,其探测角度为360°可以覆盖机器人前方和足端大部分的区域,具体参数如下:
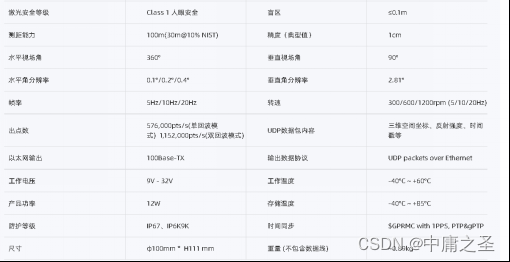
探测角度如下,盲区10cm:
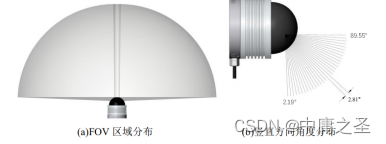
图11 胸部激光雷达传感器
由于人形机器人站立后胸前的激光雷达仅能探测前方一定角度区域内的障碍物,这将导致机器人无法感知后方和脚下的障碍物信息,在机器人腰部前后各增加1路深度相机,具体性能参数如下:
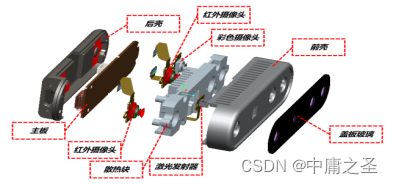
图12 深度相机构成图
1)双目基线:50mm;
2)工作范围:19cm~10m(依环境而改变);
3)深度精度:<2% at 2m;
4)深度相机视场(FOV):H80.5°×V55.2°;
5)深度图分辨率:640×400@30fps。
6)数据接口:USB2.0;
7)输入电压:5VDC(USB2.0供电);
8)工作电流:平均260mA,峰值1A;
10)典型功耗:平均功耗1W,峰值功耗<6W。
红外摄像头中的CMOS选型为一款720P的图像传感器,可输出1280H×720V分辨率图像信号。红外摄像头指标参数如下表所示。
表 7 红外摄像头指标参数
| 参数 | 指标 |
| 分辨率 | H1280×V720 |
| 像素大小 | 3μm×3μm |
| 曝光方式 | 全局曝光 |
| 帧率 | 30fps |
| IR | 940nm |
| 备注 | 适配镜头后视场角:H80.5°×V55.2° |
激光发射器为VCSEL结构光投射器,激光波长为940nm,散斑点数为30K,投射器视场(FOV)为H102°×V78°,激光安全等级为Class 1,具有光效高、均匀性好、点阵随机性强等特点。激光发射器参数如表所示。
表 8 激光发射器指标参数
| 参数 | 指标 |
| 激光波长 | VCSEL 940nm |
| 散斑点数 | 30K |
| 投射器视场(FOV) | H102°×V78° |
| 激光安全等级 | Class 1 |
彩色相机中的CMOS集成了1280H×720V像素阵列,具有MIPI接口。彩色相机CMOS指标参数如表所示。
表 9 彩色相机CMOS指标参数
| 参数 | 指标 |
| 分辨率 | 1280×720 |
| 像素大小 | 1.75μm×1.75μm |
| 曝光方式 | 卷帘曝光 |
| 帧率 | 30fps |
| IR | 650nm |
| 备注 | 适配镜头后视场角:H65.9°×V51.3° |
主板指标性能如表所示。
表 10主板指标参数
| 参数 | 指标 |
| 供电方式 | USB2.0 |
| 支持操作系统 | Linux |
| MIPI摄像头 | 3个 |
| 深度图分辨率 | 30fps@640×400 |
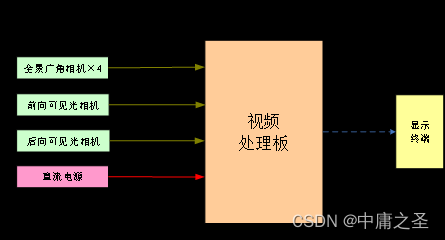
全景环视系统基于嵌入式高性能多媒体处理器,通过在机器人腰部布置四个超广角可见光相机,将采集到的图像信息拼接成一副全景鸟瞰图,并通过显示终端解码显示鸟瞰图,操作手可直观的看到机器人所处的位置以及其周围环境、目标物、障碍物等。还可以根据需要在机器人前胸和后背配置两路广角摄像头,用于直接输出或拼接输出其身体前向和后向的环境态势。全景环视系统框图如图所示。
全景环视系统中的全景广角相机选择GC2035摄像头模组,该模组由1/2.9英寸CMOS图像传感器和120°广角镜头组成,可输出1920×1080分辨率的图像信号,视频接口为MIPI。其参数指标如表所示。
表 11 GC2035指标参数
| 参数 | 指标 |
| 分辨率 | 1920H×1080V |
| 像面尺寸 | 1/2.9 |
| 曝光方式 | 全局曝光 |
| 帧率 | 1080P@30fps |
| 镜头 | 120°广角镜头 |

















 7707
7707

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









