







关注同名微信公众号“混沌无形”,阅读更多有趣好文!
原文链接:机器人空间采样算法研究现状简述(包含原文PDF百度云下载链接)

空间采样算法按照采样空间不同,可分为:状态空间采样和运动空间采样。如图 2.1所示,基于状态空间采样的算法能够在大面积、高纬度的空间中快速生成路径,包括RRT和PRM类算法等,具有概率完备性,其主要步骤包括随机采样、度量连接、碰撞检测和路径查询。基于运动空间采样的算法则在速度空间等距采样,通过评价函数选择最佳控制指令,驱动机器人运动,主要包括CVM类算法及DWA类算法等。
(请横屏看图)
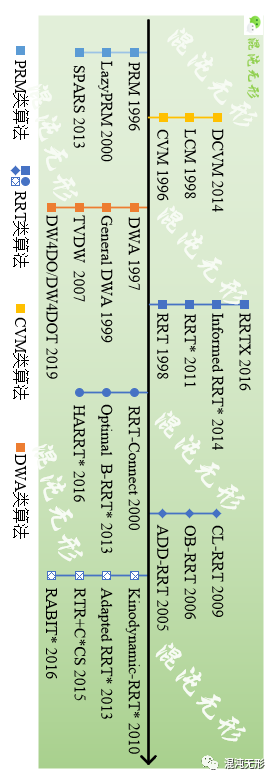
图 2.1 空间采样算法发展路线概况
第三类是CVM(Curvature Velocity Method)类算法,核心思想是基于非全向移动机器人小速度空间范围,结合运动学模型,生成预测轨迹,并进行约束条件评估分析,找出最合适的轨迹。
Simmons、Ko等人针对差速移动机器人提出基于有边界的速度空间采样方法,即机器人运动轨迹为圆弧或直线。如CVM[19]在速度空间中等距采样,并选择综合成本最低的速度以控制机器人,LCM[20]针对廊道场景,将CVM与方向空间法相结合,驱动机器人沿着廊道运动的同时避开障碍物。如图 1.6所示,DCVM[21]融入概率3D占据-速度栅格图,用于避开动态障碍物,并在仿真和真实环境中得到验证。
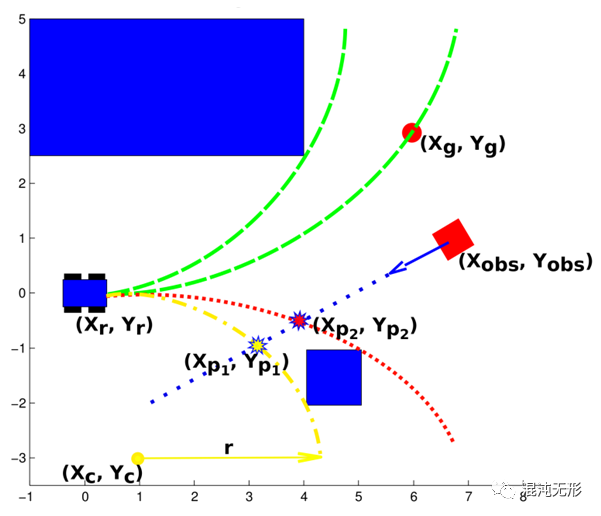
图 2.7 DCVM[21]
精彩的理论论证过程见原文链接(含全文下载链接)
由于网页排版效果一般,所以笔者按照期刊论文版式为小伙伴们整理了原文PDF,方便收藏和回味。
原文链接:(包含原文PDF百度云下载链接)
CSDN下载链接:移动机器人路径规划之一空间采样算法如果喜欢的话,可以关注我,阅读更多有趣好文!
微信公众号:混沌无形
知乎号:混沌无形
B站:混沌无形R

















 539
539











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











