







问题的由来
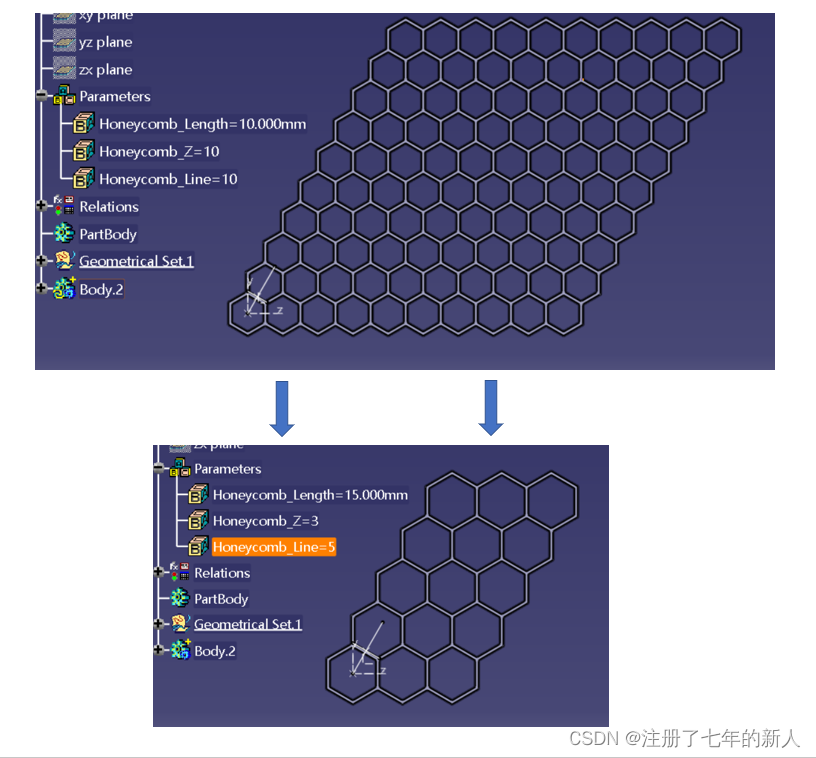
蜂窝型加强筋一般用于前灯灯壳的底部或者安装腿的位置,或者是尾灯的灯壳底部。但是每次更改都比较麻烦,无法一键更改完成,如图所示: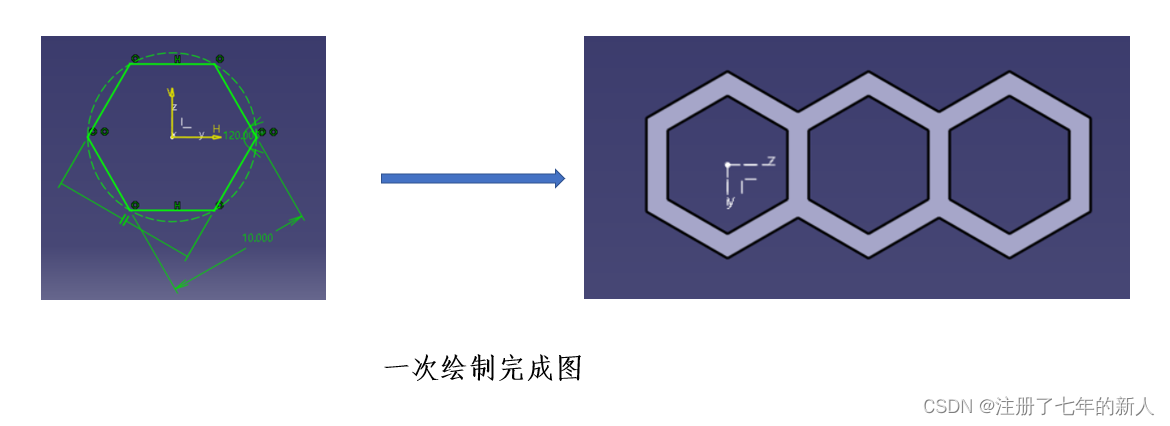
将长度10mm更改成15后: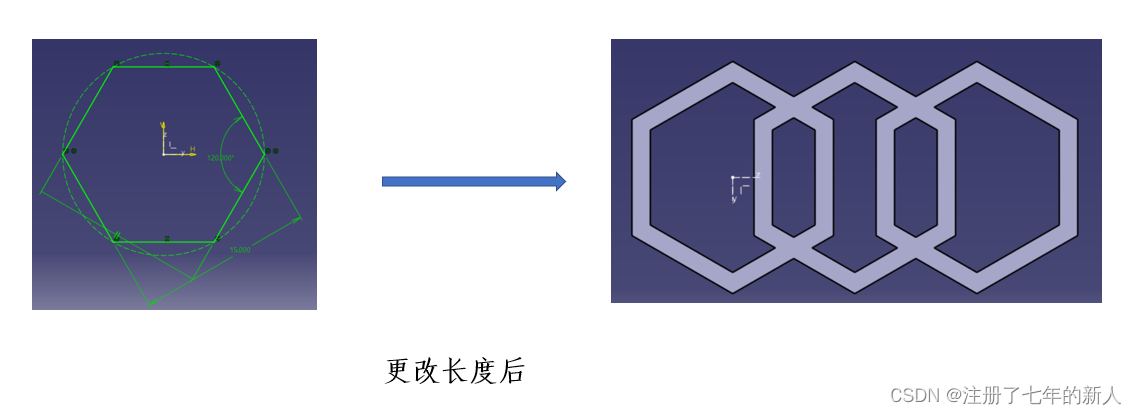
如果后期要更改会比较麻烦,所以就想着用参数的方法来控制,达到可以直接更改长度以及两个方向的矩阵数量。
开工
建立参数
需要用到的参数有:六边形两边的距离(之所以要用这个是因为方便后续阵列)、两个方向矩阵的个数。
打开参数设置
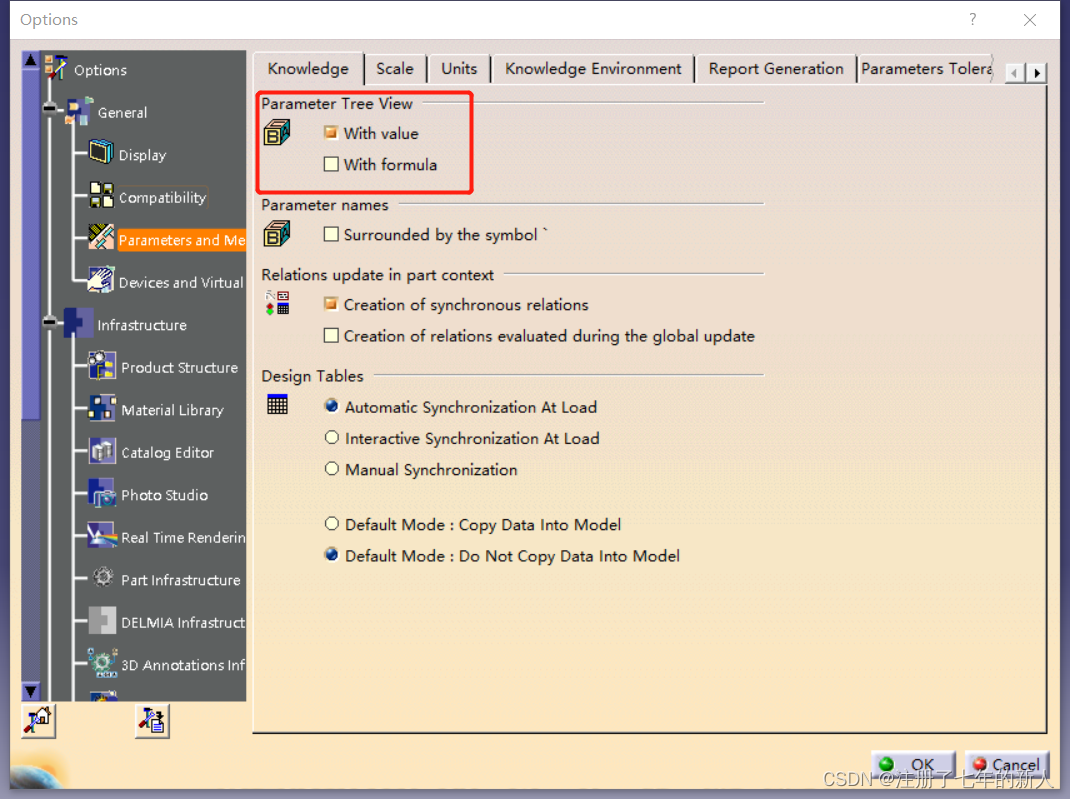
要先按照下面的步骤打开设置,要不看不到:
点击:Tool——Option,打开以下设置: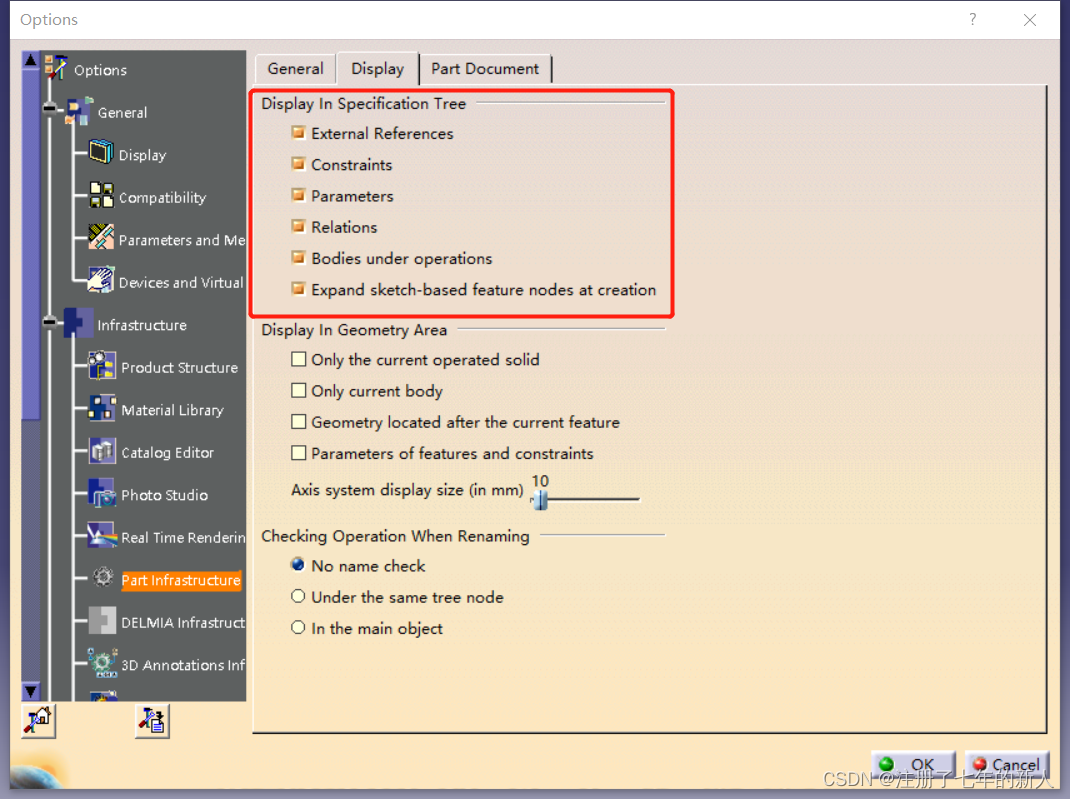
如何创建参数
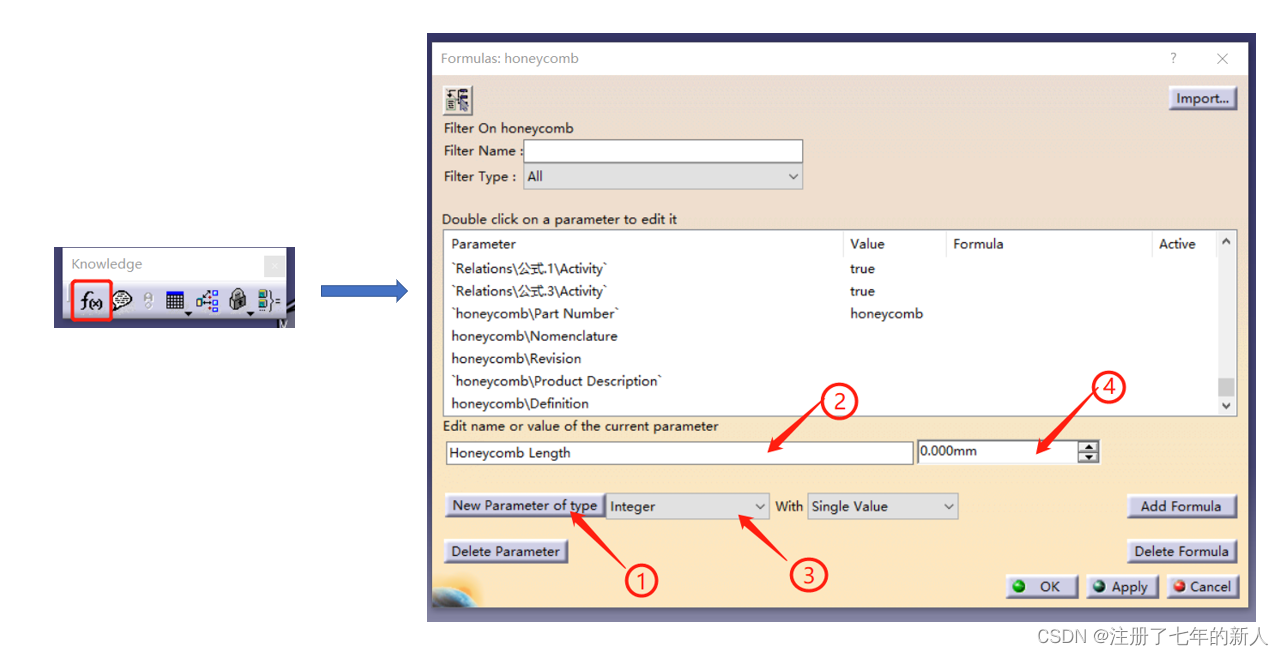
点击“知识”里的函数按钮,后按照图中步骤来创建参数
1.新建参数
2.参数名
3.参数类型
4.数值大小
其中3.参数类型要注意,里面能选择很多种不同的类型,其中方向个数得是整数,要不之后矩阵的时候会无法选定,报参数类型不同的错。
创建完成后点击OK即可,我创建了以下几个: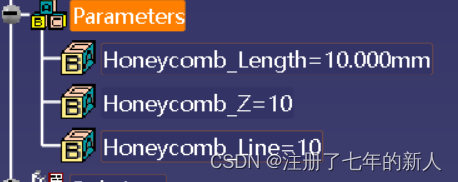
长度是String(字符串),其他两个是整数。
绘制一个六边形
在草图中绘制出六边形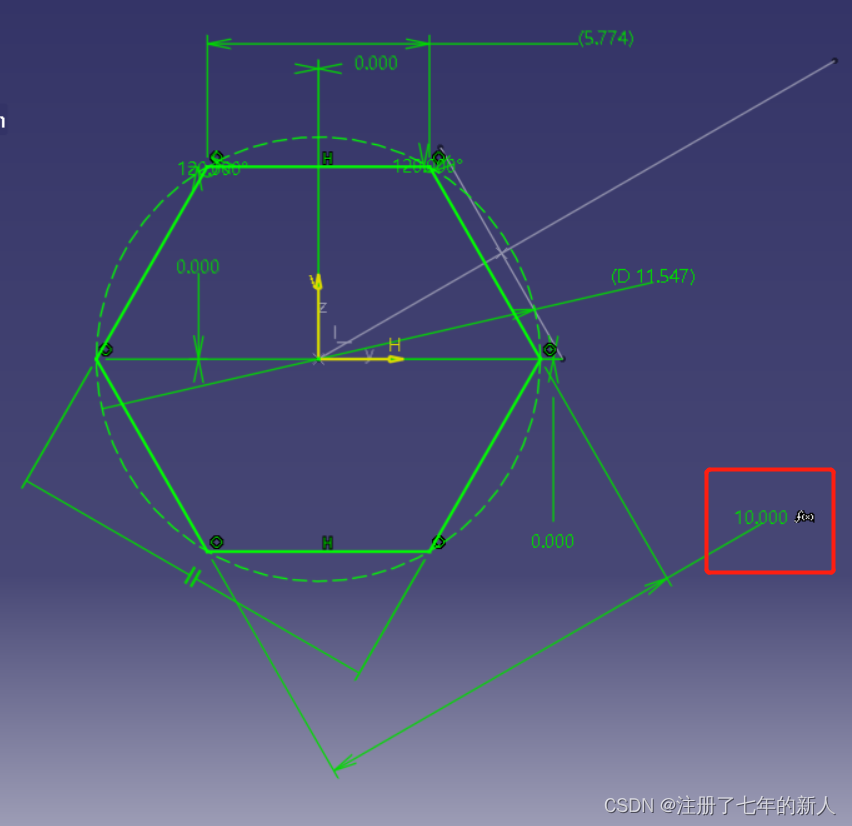
注意框里的这个值,我是链接了外面的参数的。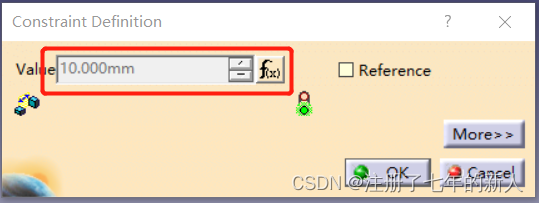
在框里写“=”然后点击Honeycomb_Length就可以了。
之后就是拉成实体、拔模。
矩阵
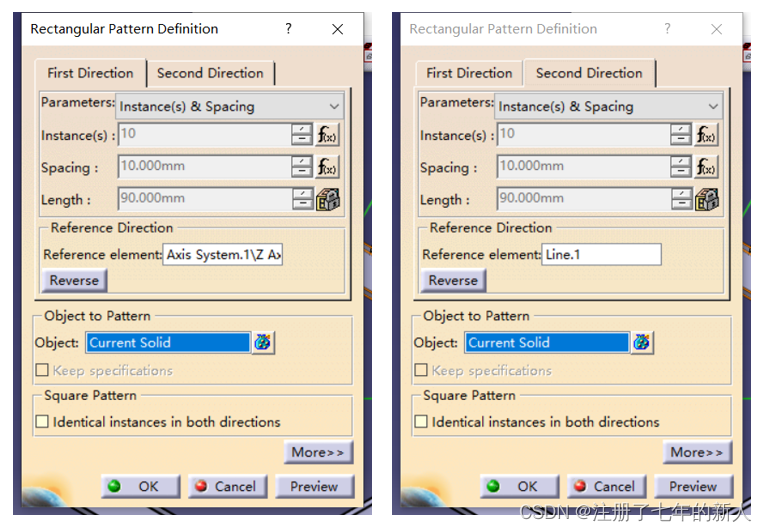
数量写 “=”+“左键选择之前设定的数量的参数”;方向我一个选择Z轴,另一个选择Line.1(这个线和Z轴在平面上呈60°)
最后
之后就可以直接双击参数修改对应数值就可以了,如将Honeycomb_Length从10mm改成15mm,Honeycomb_Z从10改成3,Honeycomb_Line从10改成5,效果如下:
大家可以下载我链接里的来看看:https://download.csdn.net/download/qq_19829077/87663177
欢迎大佬们批评指正


















 2391
2391

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











