









 本文介绍了ToF测量法,包括单点测距原理,涉及组件如发射/接收二极管、调制解调模块和ADC。此外,还详细讲解了ToF-多点测距原理,与RGB摄像头的区别以及使用CMOS传感器和特定波长的光学设计。
本文介绍了ToF测量法,包括单点测距原理,涉及组件如发射/接收二极管、调制解调模块和ADC。此外,还详细讲解了ToF-多点测距原理,与RGB摄像头的区别以及使用CMOS传感器和特定波长的光学设计。
概念
ToF
是
Time of Flight
的缩写,
ToF
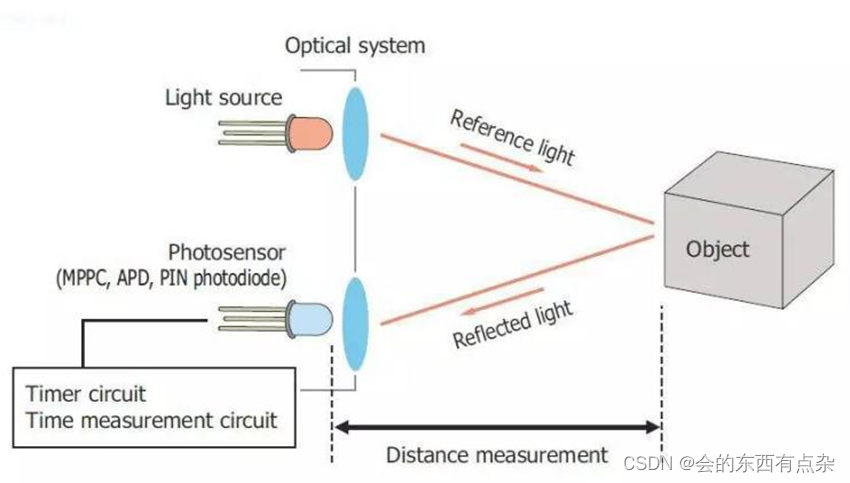
测量法又被称作飞光时间测量法,是通过给目标连续发射激光脉冲,然后用传感器接收在被测平面上反射回来的光脉冲,通过计算光脉冲的飞行往返时间来计算得到确切的目标物距离。因为返回时间很短,通过直接法测光飞行时间不可行,一般会使用经过调制后的光波计算其相位偏移来实现。
ToF-单点测距原理
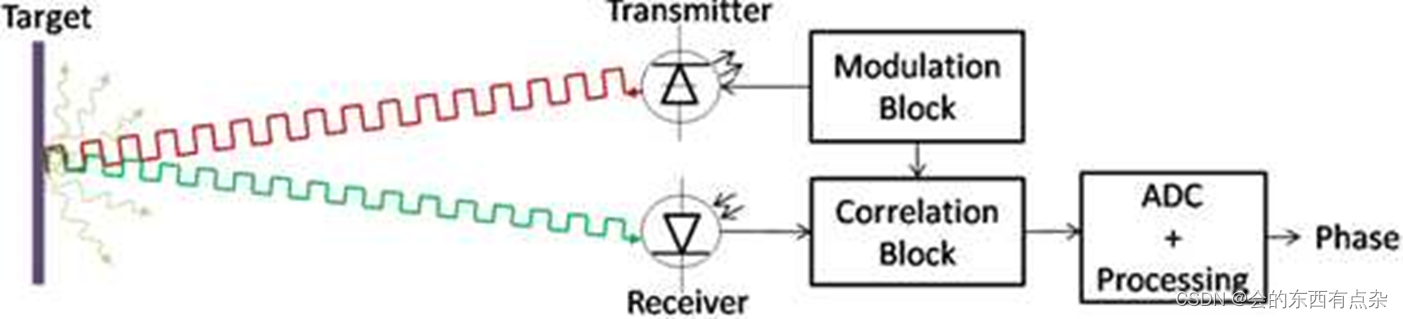
它由一个发射二极管、接收二极管、调制模块,解调模块、处理器几部分组成。调制模块负责调制发射的红外调制波,通过发射二极管将信号发射出去。解调模块负责对接受二极管接收到的反射红外波解调。处理器中包含
ADC
和数据处理,
ADC
是为了将模拟信号转化为数字信号。数据处理时将测得的相位差换算成深度信息。
ToF
-
单点测距原理
ToF-多点测距原理
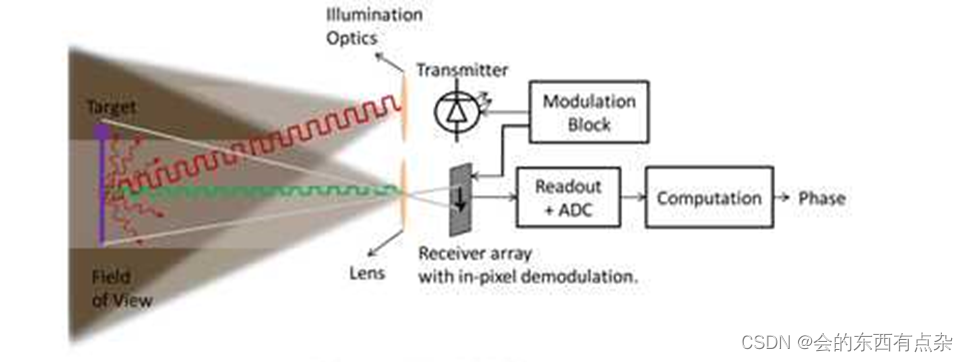
它和传统
RGB
摄像头的组成结构基本相似。它与点单的
ToF
系统比较区别在于,测量范围不是一个点,它是一个面,因此,接收模块变成了点阵的光敏传感器,通常使用的是
CMOS
传感器。在传感器前面、和发射二极管前面多了光学镜片,一个是为了红外波的辐射范围、一个是为了滤除
850nm
以外的光线,就是说,要保证进入传感器的光线只是
850nm
的,这样才能保证测量的准确度。


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











