







【在英伟达nvidia的jetson-orin-nx-工控机入门了解-自我学习-资料记录-熟悉了解】
1、概述
近期开始学习英伟达的工控板,作为新手还是有很多不同懂得地方,但是一部分它用的linux系统,有点像玩树莓派,自己也看了一些资料,最近也是调试了几个外部接口,想着将一些资料整理下。
一般用这种工控机,都是跑Ai算法什么的,我还没到那一步,至少现在还没到,一直调试底层的驱动来着,有很多资料需要了解。
2、实验环境
使用提供软硬件信息。
硬件信息:Jetson Orin nx
软件版本:5.10.104-tegra #1 SMP PREEMPT Sun Mar 19 07:55:28 PDT 2023 aarch64 aarch64 aarch64 GNU/Linux

本章只是一些资料记录,不东西。
3-1初次接触工控机版本-真的好多-新手一脸懵逼
最开始接触时,发现英伟达的工控机版本好多啊,不同型号之间,各种尾椎,根本不知道有什么差别。可谓是”真的好多-新手一脸懵逼“。
后来查资料时,看官方文档,发现了一种区分不同版本方式,可以方便帮我们区分,就在下载资料文档里。
连接文档:https://developer.nvidia.com/embedded/downloads
同是这个文档也是下载资料的地方,所有英伟达资料都可以来这里翻一翻。
如下图:
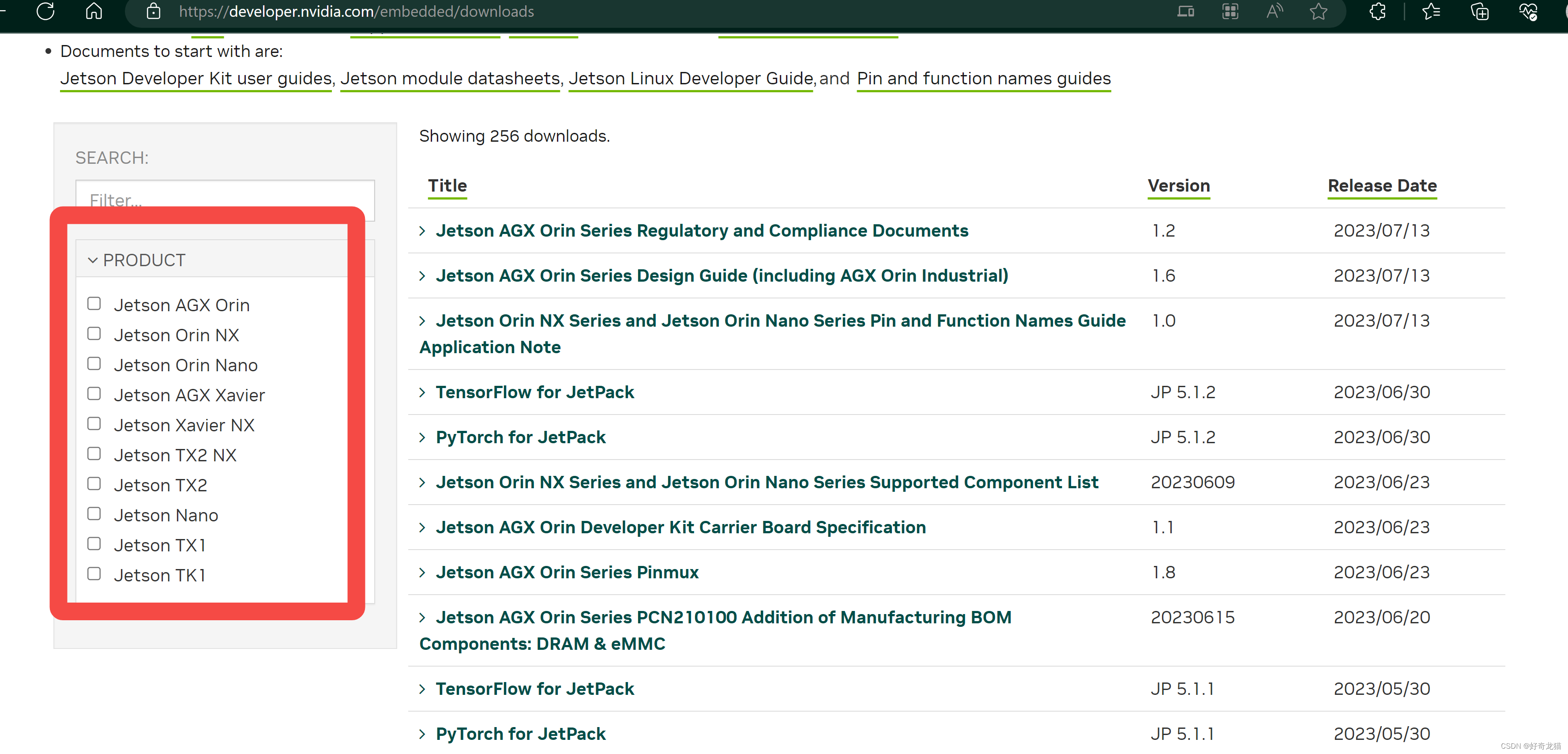
如图所示,可以说,目前英伟达的工控机就这样些,都是jetson开头。
越往上价格越贵,性能也就越高,越往下,价格也就越便宜,但是性能就会差些。

目前网上jetson AGX orin,一套(载板+核心板)基本都过万了。
我目前买的jetson orin nx,是核心板是原版,加上国产载板,大概8K左右。
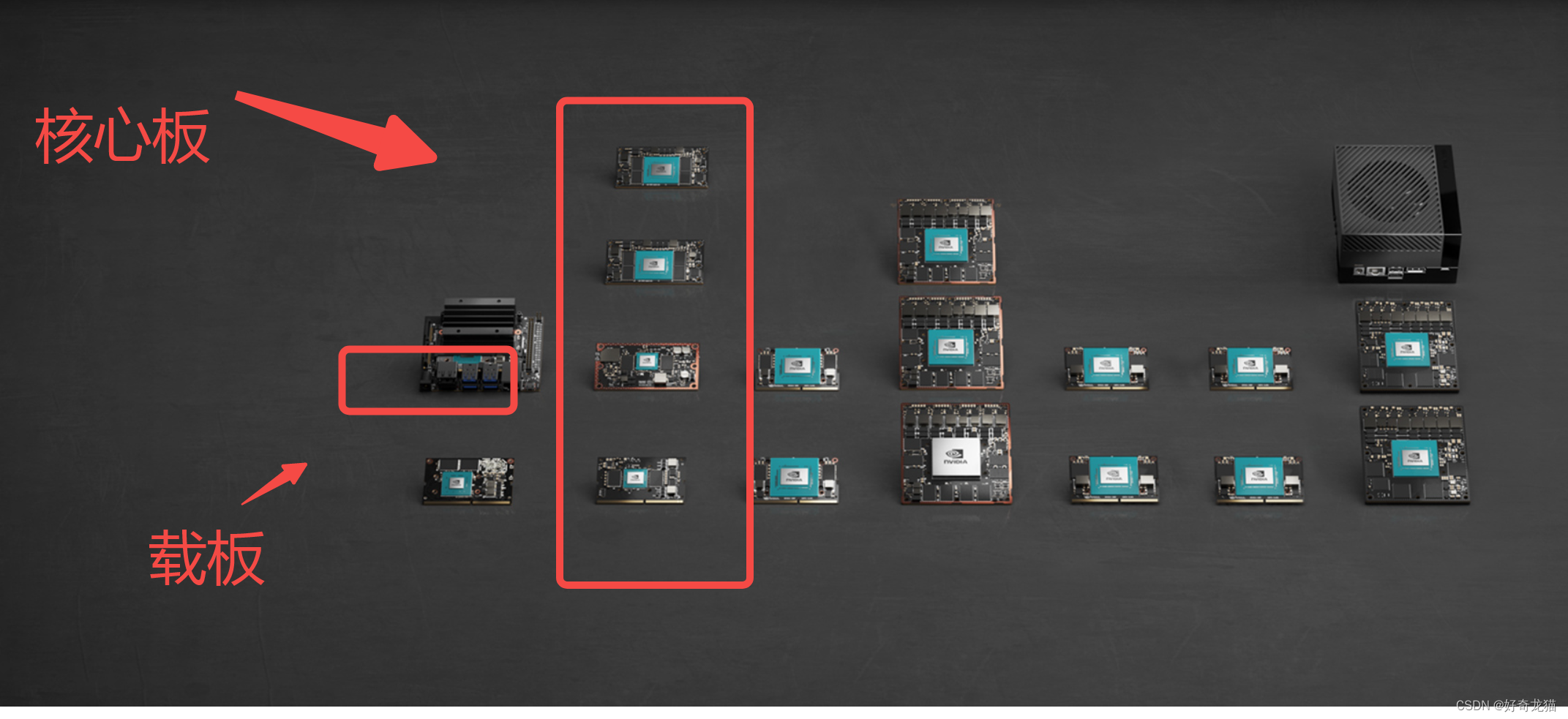
3-2 啥是载板和核心板
记得当初自己确实不知道,以为工控机就是一个整体,其实是由两部分组成的。如果你只买核心板,或者载板,其实是跑不起来的,在一些二手交易平台上,有些买的很便宜的,可能就是只有一部分。
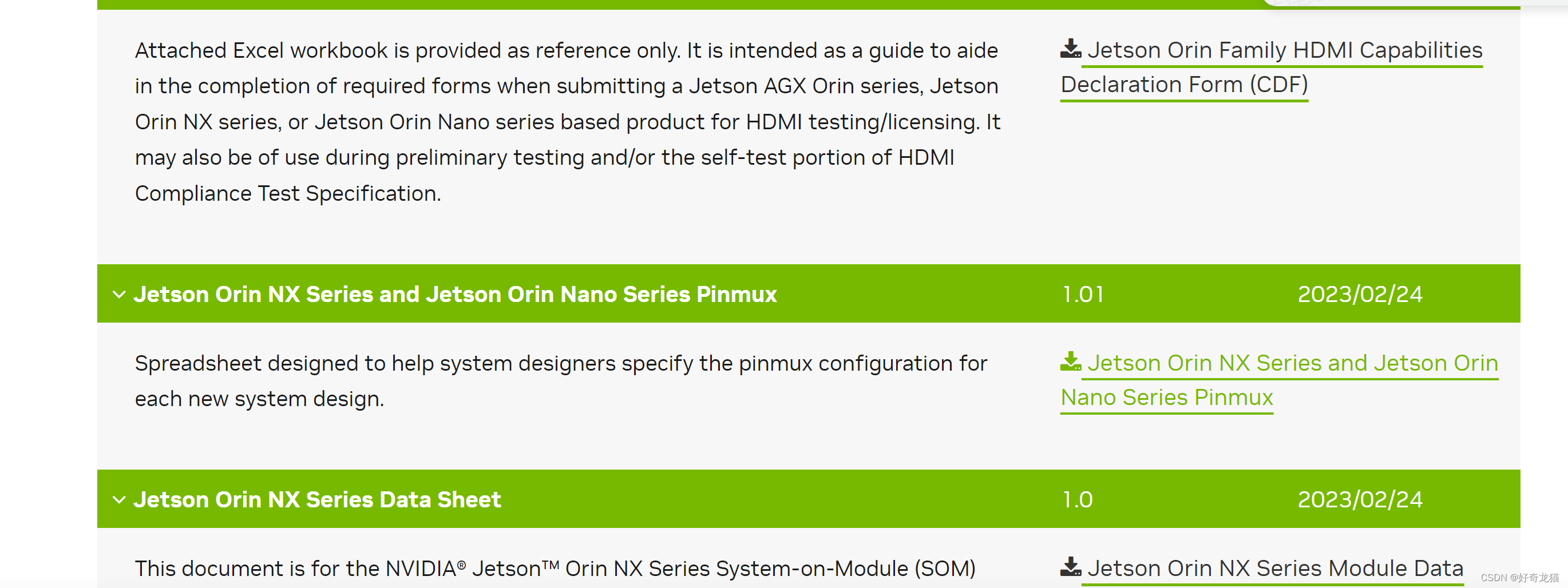
3-3 查看资源资料
如下图,有些文档,会说明,不同核心板之间,资源有什么不同,这种对比表。
如下是链接论坛:https://forums.developer.nvidia.com/c/agx-autonomous-machines/jetson-embedded-systems/70
参考文档:https://docs.nvidia.com/jetson/archives/r34.1/DeveloperGuide/index.html#
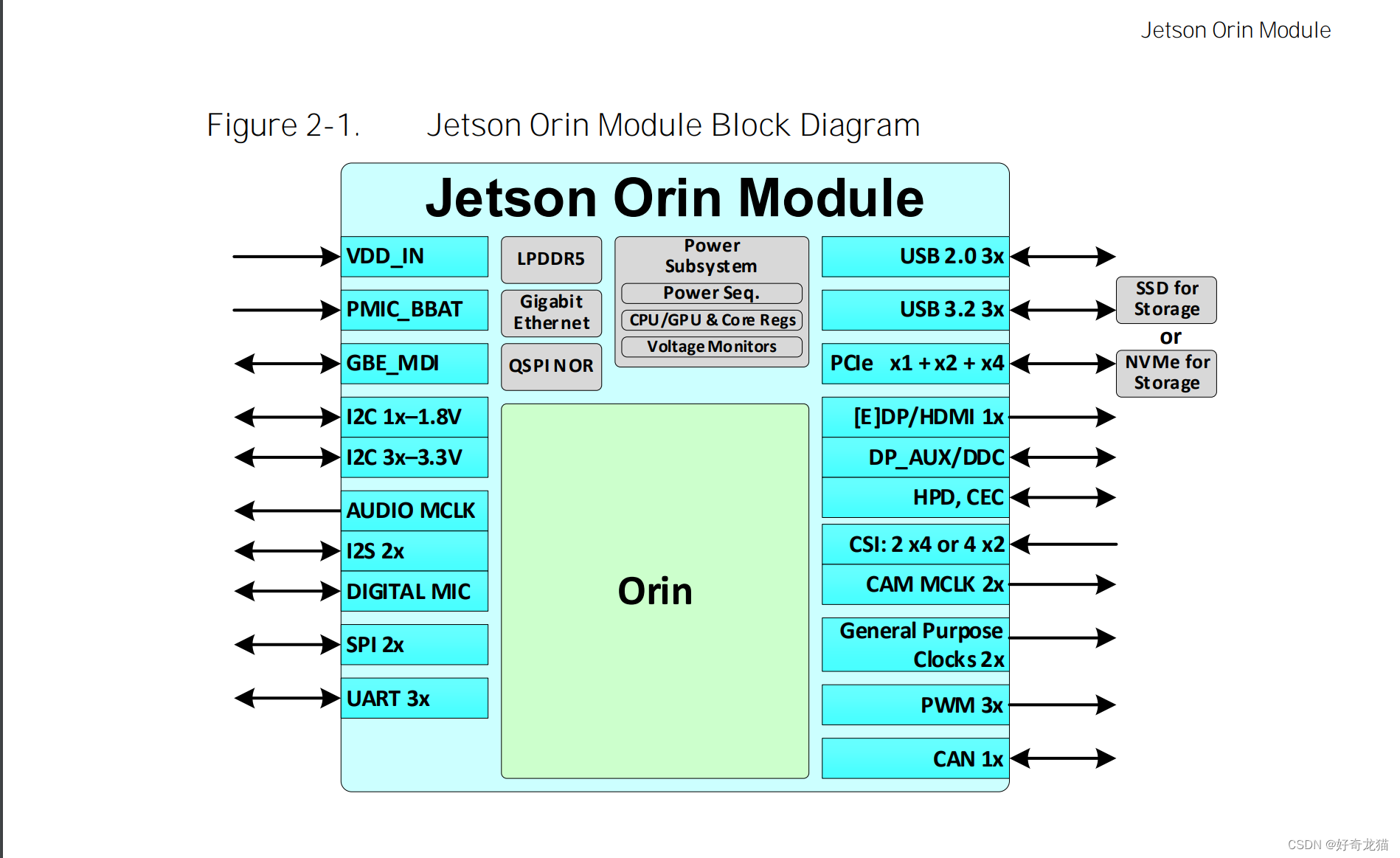
3-4 了解外设资源
如下图,有些文档,会标明这个核心板都有什么资源module,具体可以去搜搜。
文件名称:Jetson Orin NX Series and Jetson Orin Nano Series
()Product Design Guide)
3-5 查看博客论坛
对于一些问题,自己不知道时候,可以看看论坛里是否有说明的,也许有解决方式,只不过是英文的。
链接:https://forums.developer.nvidia.com/
3-6 底层配置pinmux
一般要调试底层驱动的话,修改IO什么的就会涉及这个,应该是基本绕不开。
自己目前理解,它是一个IO表,可以配置IO相应状态,然后生成文件,比较底层了。再给系统,目前还没有到,不过感觉以后应该会用到的。
如下表格。

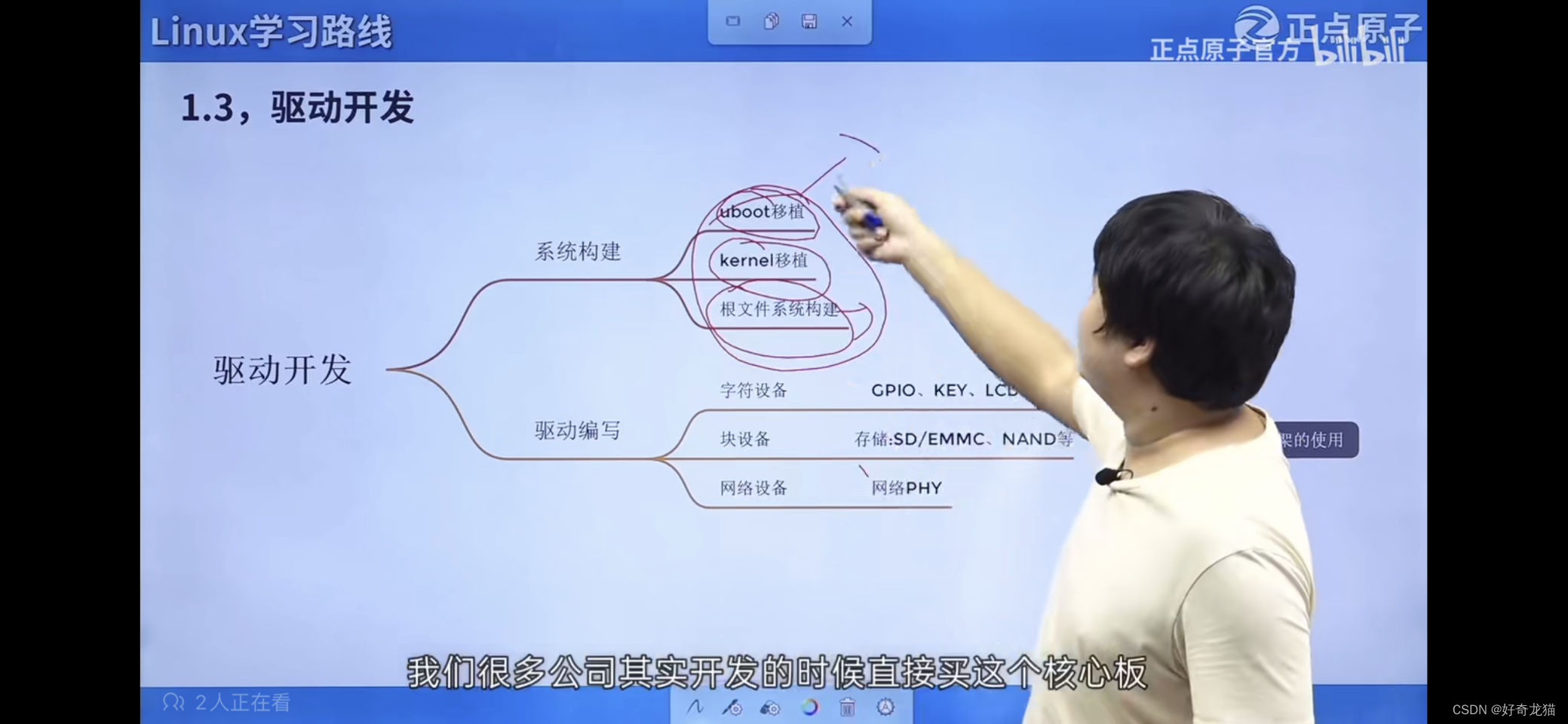
3-7 Linux驱动开发
目前看来常见的驱动,其实Linux本身已经带有了,基本不需要再次开发了,直接使用即可,如果是新的设备,驱动一般会从厂家要。
如下图,如果做驱动相关开发,需要了解一下整体框架,正点原子这个图就很直观了。
3-8 AI相关
我们使用这个工控板,一般不是说简单玩Linux,还是有跑些AI的东西,或者图像识别,这块还没看开始学习,自己的同学,有使用一个叫yolov5的工具,做图片或者视频识别的,更深些就没了解,暂时还没到那。
3-8 jetson-io和40-pin工具
如果调试40-pin的话,目前听说jetson-io这个工具还是挺好用的,自己也在不断尝试过程中。
链接:https://jetsonhacks.com/nvidia-jetson-xavier-nx-gpio-header-pinout/

4、总结
资料可以说还是比较多的,需要消化些,但对于细节部分,或者某个专业方向,可能会有些少,现总结这些吧。


















 4786
4786

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











