







最近要对faceboxes的网络结构进行TensorRT加速,发现同事使用的faceboxes中的priorBox layer和平常使用的priorBox layer在网络结构上好像不太一样,这就说明,我有可能需要在TensorRT中自己添加自己的priorBox层了.这里比较了常规的prior_box_param参数:
prior_box_param{
min_size:60.0 #有的包含max_size;
aspect_ratio:2.0
flip:true
clip:false
variance:0.1
variance:0.1
variance:0.2
variance:0.2
offset:0.5
}而face_boxes中使用的的prior_box_param是这样的:
prior_box_param{
fixed_size:512 #有的包含多个
density:1 #有的包含多个
step:128
variance:0.1
variance:0.1
variance:0.2
variance:0.2
offset:0.5
}对比caffe中proto中的PriorBoxParameter中的参数发现,face_boxes的caffe工程(https://github.com/zeusees/FaceBoxes)中使用的代码增加了三个参数:
repeated float fixed_size = 14;
repeated float fixed_ratio = 15;
repeated float density = 16;所以说较之前的代码实现而言,可能需要添加priorBox Iplugin;这就需要了解priorBox的代码原理了:
priorBox的原理我的理解是这样的:
人为的制作了一些不同比例的box框,priorbox层就是用于生成这些框;生成这些框有什么用了?如果生成的框和ground truth重合或是大于某个设定的阈值,则满足条件的这个框就是正样本,否则这些框就是负样本了;同时,同一层的所有特征图共享一组默认框。
看源码:
首先是caffe.proto中的priorBox中的参数包括那些(参考:SSD网络解析之PriorBox层_走的那么干脆的博客-CSDN博客_priorbox):
// Message that store parameters used by PriorBoxLayer
message PriorBoxParameter {
// Encode/decode type.
enum CodeType {
CORNER = 1;
CENTER_SIZE = 2;
CORNER_SIZE = 3;
}
// Minimum box size (in pixels). Required!
repeated float min_size = 1; //对应论文2.2节中公式(4)中的sk×网络输入层输入
图像[data层的输入]大小
// Maximum box size (in pixels). Required!
repeated float max_size = 2; //下一层用来生成默认框特征图所在的min_size
// Various of aspect ratios. Duplicate ratios will be ignored.
// If none is provided, we use default ratio 1.
repeated float aspect_ratio = 3; //宽高比
// If true, will flip each aspect ratio.
// For example, if there is aspect ratio "r",
// we will generate aspect ratio "1.0/r" as well.
optional bool flip = 4 [default = true]; //是否翻转宽高比
// If true, will clip the prior so that it is within [0, 1]
optional bool clip = 5 [default = false]; //是否进行裁剪(是否保证默认框整个在网络输入层输入图像内)
// Variance for adjusting the prior bboxes.
repeated float variance = 6; //暂时未知用来做什么
// By default, we calculate img_height, img_width, step_x, step_y based on
// bottom[0] (feat) and bottom[1] (img). Unless these values are explicitely
// provided.
// Explicitly provide the img_size.
optional uint32 img_size = 7;
// Either img_size or img_h/img_w should be specified; not both.
optional uint32 img_h = 8; //网络输入层输入图像的高(或自行设置的高度)
optional uint32 img_w = 9; //网络输入层输入图像的宽(或自行设置的宽度)
// Explicitly provide the step size.
optional float step = 10;
// Either step or step_h/step_w should be specified; not both.
optional float step_h = 11; //特征图上同一列上相邻两像素点间的距离在网络输入层输入图像上
的距离
optional float step_w = 12; //特征图上同一行上相邻两像素点间的距离在网络输入层输入图像上
的距离
// Offset to the top left corner of each cell.
optional float offset = 13 [default = 0.5]; //默认框中心偏移量(相对偏移量)
repeated float fixed_size = 14;
repeated float fixed_ratio = 15;
repeated float density = 16;
}源码理解:
#include <algorithm>
#include <functional>
#include <utility>
#include <vector>
#include <math.h>
#include "caffe/layers/prior_box_layer.hpp"
namespace caffe {
template <typename Dtype>
void PriorBoxLayer<Dtype>::LayerSetUp(const vector<Blob<Dtype>*>& bottom,
const vector<Blob<Dtype>*>& top) {
const PriorBoxParameter& prior_box_param =
this->layer_param_.prior_box_param();//获取所需的参数
// CHECK_GT(prior_box_param.min_size_size(), 0) << "must provide min_size.";//min_size是必须的,不可缺省设置
if (prior_box_param.min_size_size()>0){
for (int i = 0; i < prior_box_param.min_size_size(); ++i) {
min_sizes_.push_back(prior_box_param.min_size(i));
CHECK_GT(min_sizes_.back(), 0) << "min_size must be positive.";//min_size必须为正数(CHECK_GT表示大于[greater than])
}
}
//for face boxes
if (prior_box_param.fixed_size_size()>0){
for (int i = 0; i < prior_box_param.fixed_size_size(); ++i) {
fixed_sizes_.push_back(prior_box_param.fixed_size(i));
CHECK_GT(fixed_sizes_.back(), 0) << "fixed_size must be positive.";//fixed_size必须为正数
CHECK_GT(prior_box_param.density_size(),0) << "if use fixed_size then you must provide density";//fixed_size & density appear in same time;
}
}
if (prior_box_param.fixed_ratio_size()>0){
CHECK_EQ(0,prior_box_param.aspect_ratio_size()) << "can not provide fixed_ratio and aspect_ratio simultaneously.";//fixed_ratio是必须的,不可缺省设置
}
fixed_ratios_.clear();
for(int i=0; i < prior_box_param.fixed_ratio_size(); ++i){
float ar = prior_box_param.fixed_ratio(i);//将fixed_ratio拷贝到类变量fixed_ratio中
fixed_ratios_.push_back(ar);
}
//end
aspect_ratios_.clear();
aspect_ratios_.push_back(1.); //默认情况下宽高比为1(也即会默认设置一个为1的宽高比)
flip_ = prior_box_param.flip();//flip=true表示翻转宽高比,即原设置的宽高比为2,则翻转后宽高比为1/2
//筛选不同的宽高比(即允许设置的宽高比重复,代码会自动找出不重复的,也即不同的宽高比)
for (int i = 0; i < prior_box_param.aspect_ratio_size(); ++i) {
float ar = prior_box_param.aspect_ratio(i);
bool already_exist = false;
for (int j = 0; j < aspect_ratios_.size(); ++j) {
if (fabs(ar - aspect_ratios_[j]) < 1e-6) {
already_exist = true;
break;
}
}
if (!already_exist) {
aspect_ratios_.push_back(ar);//将不同的宽高比放入aspect_ratios_中
if (flip_) {
aspect_ratios_.push_back(1./ar);//将翻转后的宽高比也放入aspect_ratios_中
}
}
}
if (min_sizes_.size()>0){
num_priors_ = aspect_ratios_.size() * min_sizes_.size();//计算需要生成的默认框
}
//for face_boxes
if (fixed_sizes_.size()>0){
num_priors_ = aspect_ratios_.size() * fixed_sizes_.size();
}
if(prior_box_param.density_size() > 0) {
for(int i=0;i<prior_box_param.density_size();++i){
densitys_.push_back(prior_box_param.density(i));
CHECK_GT(densitys_.back(), 0) << "density must be positive.";
if (prior_box_param.fixed_ratio_size()>0){
num_priors_ += (fixed_ratios_.size()) * (pow(densitys_[i],2)-1);
}else{
num_priors_ += (aspect_ratios_.size()) * (pow(densitys_[i],2)-1);
}
}
}
//end
if(prior_box_param.max_size_size() > 0) {
CHECK_EQ(prior_box_param.min_size_size(), prior_box_param.max_size_size());//检查所设置的min_size数目和max_size数目是否相等(CHECK_EQ表示相等)
for (int i = 0; i < prior_box_param.max_size_size(); ++i) {
max_sizes_.push_back(prior_box_param.max_size(i));
CHECK_GT(max_sizes_[i], min_sizes_[i])
<< "max_size must be greater than min_size.";//max_size必须大于min_size
num_priors_ += 1;//默认框数目加1
}
}
clip_ = prior_box_param.clip();//获取裁剪参数
//将variance拷贝到类变量variance_中
if (prior_box_param.variance_size() > 1) {//获取variance参数(用户可设置1个或4个或不设置)
// Must and only provide 4 variance.
CHECK_EQ(prior_box_param.variance_size(), 4);
for (int i = 0; i < prior_box_param.variance_size(); ++i) {
CHECK_GT(prior_box_param.variance(i), 0);
variance_.push_back(prior_box_param.variance(i));
}
} else if (prior_box_param.variance_size() == 1) {
CHECK_GT(prior_box_param.variance(0), 0);//此情况下表示只设置一个variance
variance_.push_back(prior_box_param.variance(0));
} else {
// Set default to 0.1.
variance_.push_back(0.1);//默认情况下设置variance = 0.1
}
//prototxt中一般未给定img_h,img_w和img_size,所以img_h,img_w = 0
if (prior_box_param.has_img_h() || prior_box_param.has_img_w()) {
CHECK(!prior_box_param.has_img_size())
<< "Either img_size or img_h/img_w should be specified; not both.";//两者只能设置一种
img_h_ = prior_box_param.img_h();
CHECK_GT(img_h_, 0) << "img_h should be larger than 0.";
img_w_ = prior_box_param.img_w();
CHECK_GT(img_w_, 0) << "img_w should be larger than 0.";
} else if (prior_box_param.has_img_size()) {
const int img_size = prior_box_param.img_size();
CHECK_GT(img_size, 0) << "img_size should be larger than 0.";
img_h_ = img_size;
img_w_ = img_size;
} else {
img_h_ = 0; //如果两者均未设置,则先赋值为0
img_w_ = 0;
}
//step赋值给step_h_和step_w_
if (prior_box_param.has_step_h() || prior_box_param.has_step_w()) {
CHECK(!prior_box_param.has_step())
<< "Either step or step_h/step_w should be specified; not both.";
step_h_ = prior_box_param.step_h();
CHECK_GT(step_h_, 0.) << "step_h should be larger than 0.";
step_w_ = prior_box_param.step_w();
CHECK_GT(step_w_, 0.) << "step_w should be larger than 0.";
} else if (prior_box_param.has_step()) {
const float step = prior_box_param.step();
CHECK_GT(step, 0) << "step should be larger than 0.";
step_h_ = step;
step_w_ = step;
} else {
step_h_ = 0;
step_w_ = 0;
}
offset_ = prior_box_param.offset();//获取相对左上角的偏移量(默认为0.5)
}
template <typename Dtype>
void PriorBoxLayer<Dtype>::Reshape(const vector<Blob<Dtype>*>& bottom,
const vector<Blob<Dtype>*>& top) {
const int layer_width = bottom[0]->width();//获取特征图的长和宽
const int layer_height = bottom[0]->height();
vector<int> top_shape(3, 1);
// Since all images in a batch has same height and width, we only need to
// generate one set of priors which can be shared across all images.
top_shape[0] = 1;//由于每一batch中所有特征图具有相同的长和宽,因此我们只需要生成一组可以在该batch中所有特征图之间共享的默认框
// 2 channels. First channel stores the mean of each prior coordinate.
// Second channel stores the variance of each prior coordinate.
top_shape[1] = 2;//第一个通道存储默认框左上角和右下角归一化坐标;第二个通道存储这些坐标的variance
top_shape[2] = layer_width * layer_height * num_priors_ * 4;//特征图每一像素点处都产生num_priors_个默认框,每个预测框相对默认框有4归一化坐标值/也有4个variance
CHECK_GT(top_shape[2], 0);
top[0]->Reshape(top_shape);
}
template <typename Dtype>
void PriorBoxLayer<Dtype>::Forward_cpu(const vector<Blob<Dtype>*>& bottom,
const vector<Blob<Dtype>*>& top) {
LOG(INFO)<<this->layer_param().name().c_str();
const int layer_width = bottom[0]->width();//inception3_priorbox 32,32
const int layer_height = bottom[0]->height(); //bottom[0]一般为特征图(feature map);bottom[1]一般为网络输入层输入数据即data
int img_width, img_height;
if (img_h_ == 0 || img_w_ == 0) {
img_width = bottom[1]->width(); //1024
img_height = bottom[1]->height();//1024
} else {
img_width = img_w_;
img_height = img_h_;
}
float step_w, step_h;
if (step_w_ == 0 || step_h_ == 0) {
step_w = static_cast<float>(img_width) / layer_width;
step_h = static_cast<float>(img_height) / layer_height;
} else {
step_w = step_w_;//32
step_h = step_h_;//32
}
Dtype* top_data = top[0]->mutable_cpu_data();
int dim = layer_height * layer_width * num_priors_ * 4;//num_priors_ = 21
int idx = 0;
//嵌套for循环来设置默认框数据
for (int h = 0; h < layer_height; ++h) {
for (int w = 0; w < layer_width; ++w) {
float center_x = (w + offset_) * step_w; //默认框中心在网络输入层输入图像(即网络的data层输入图像)上的x坐标
float center_y = (h + offset_) * step_h; //默认框中心在网络输入层输入图像上的y坐标
float box_width, box_height;
for (int s = 0; s < fixed_sizes_.size(); ++s) {
int fixed_size_ = fixed_sizes_[s];
box_width = box_height = fixed_size_;
if(fixed_ratios_.size()>0){
for (int r = 0; r < fixed_ratios_.size(); ++r) {
float ar = fixed_ratios_[r];
int density_ = densitys_[s];
int shift = fixed_sizes_[s] / density_;
float box_width_ratio = fixed_sizes_[s] * sqrt(ar);
float box_height_ratio = fixed_sizes_[s] / sqrt(ar);
for (int r = 0 ; r < density_ ; ++r){
for (int c = 0 ; c < density_ ; ++c){
float center_x_temp = center_x - fixed_size_ / 2 + shift/2. + c*shift;
float center_y_temp = center_y - fixed_size_ / 2 + shift/2. + r*shift;
// xmin
top_data[idx++] = (center_x_temp - box_width_ratio / 2.) / img_width >=0 ? (center_x_temp - box_width_ratio / 2.) / img_width : 0 ; //默认框左上角归一化后x坐标(归一化后,即网络输入层输入图像x坐标在0-1范围内)
// ymin
top_data[idx++] = (center_y_temp - box_height_ratio / 2.) / img_height >= 0 ? (center_y_temp - box_height_ratio / 2.) / img_height : 0;
// xmax
top_data[idx++] = (center_x_temp + box_width_ratio / 2.) / img_width <= 1 ? (center_x_temp + box_width_ratio / 2.) / img_width : 1;
// ymax
top_data[idx++] = (center_y_temp + box_height_ratio / 2.) / img_height <= 1 ? (center_y_temp + box_height_ratio / 2.) / img_height : 1;
}
}
}
}
else {
//this code added by gaozhihua for density anchor box
if (densitys_.size() > 0) {
CHECK_EQ(fixed_sizes_.size(),densitys_.size());
int density_ = densitys_[s];
int shift = fixed_sizes_[s] / density_;
for (int r = 0 ; r < density_ ; ++r){
for (int c = 0 ; c < density_ ; ++c){
float center_x_temp = center_x - fixed_size_ / 2 + shift/2. + c*shift;
float center_y_temp = center_y - fixed_size_ / 2 + shift/2. + r*shift;
// xmin
top_data[idx++] = (center_x_temp - box_width / 2.) / img_width >=0 ? (center_x_temp - box_width / 2.) / img_width : 0 ;
// ymin
top_data[idx++] = (center_y_temp - box_height / 2.) / img_height >= 0 ? (center_y_temp - box_height / 2.) / img_height : 0;
// xmax
top_data[idx++] = (center_x_temp + box_width / 2.) / img_width <= 1 ? (center_x_temp + box_width / 2.) / img_width : 1;
// ymax
top_data[idx++] = (center_y_temp + box_height / 2.) / img_height <= 1 ? (center_y_temp + box_height / 2.) / img_height : 1;
}
}
}
//rest of priors
for (int r = 0; r < aspect_ratios_.size(); ++r) {
float ar = aspect_ratios_[r];
if (fabs(ar - 1.) < 1e-6) {
continue;
}
int density_ = densitys_[s];
int shift = fixed_sizes_[s] / density_;
float box_width_ratio = fixed_sizes_[s] * sqrt(ar);
float box_height_ratio = fixed_sizes_[s] / sqrt(ar);
for (int r = 0 ; r < density_ ; ++r){
for (int c = 0 ; c < density_ ; ++c){
float center_x_temp = center_x - fixed_size_ / 2 + shift/2. + c*shift;
float center_y_temp = center_y - fixed_size_ / 2 + shift/2. + r*shift;
// xmin
top_data[idx++] = (center_x_temp - box_width_ratio / 2.) / img_width >=0 ? (center_x_temp - box_width_ratio / 2.) / img_width : 0 ;
// ymin
top_data[idx++] = (center_y_temp - box_height_ratio / 2.) / img_height >= 0 ? (center_y_temp - box_height_ratio / 2.) / img_height : 0;
// xmax
top_data[idx++] = (center_x_temp + box_width_ratio / 2.) / img_width <= 1 ? (center_x_temp + box_width_ratio / 2.) / img_width : 1;
// ymax
top_data[idx++] = (center_y_temp + box_height_ratio / 2.) / img_height <= 1 ? (center_y_temp + box_height_ratio / 2.) / img_height : 1;
}
}
}
}
}
for (int s = 0; s < min_sizes_.size(); ++s) {
int min_size_ = min_sizes_[s];
// first prior: aspect_ratio = 1, size = min_size
box_width = box_height = min_size_;
// xmin
top_data[idx++] = (center_x - box_width / 2.) / img_width;
// ymin
top_data[idx++] = (center_y - box_height / 2.) / img_height;
// xmax
top_data[idx++] = (center_x + box_width / 2.) / img_width;
// ymax
top_data[idx++] = (center_y + box_height / 2.) / img_height;
if (max_sizes_.size() > 0) {//论文中额外添加的另一个宽高比为1的默认框
CHECK_EQ(min_sizes_.size(), max_sizes_.size());
int max_size_ = max_sizes_[s];
// second prior: aspect_ratio = 1, size = sqrt(min_size * max_size)
box_width = box_height = sqrt(min_size_ * max_size_);
// xmin
top_data[idx++] = (center_x - box_width / 2.) / img_width;
// ymin
top_data[idx++] = (center_y - box_height / 2.) / img_height;
// xmax
top_data[idx++] = (center_x + box_width / 2.) / img_width;
// ymax
top_data[idx++] = (center_y + box_height / 2.) / img_height;
}
// rest of priors计算剩余的默认框左上角和右下角坐标
for (int r = 0; r < aspect_ratios_.size(); ++r) {
float ar = aspect_ratios_[r];
if (fabs(ar - 1.) < 1e-6) {//除去宽高比为1的情况,上面已经计算了
continue;
}
box_width = min_size_ * sqrt(ar);
box_height = min_size_ / sqrt(ar);
// xmin
top_data[idx++] = (center_x - box_width / 2.) / img_width;
// ymin
top_data[idx++] = (center_y - box_height / 2.) / img_height;
// xmax
top_data[idx++] = (center_x + box_width / 2.) / img_width;
// ymax
top_data[idx++] = (center_y + box_height / 2.) / img_height;
}
}
}
}
// clip the prior's coordidate such that it is within [0, 1]
//如果clip=true,表示要保证默认框的左上角坐标和右下角坐标(归一化后)均需要在原图像内
if (clip_) {
for (int d = 0; d < dim; ++d) {
top_data[d] = std::min<Dtype>(std::max<Dtype>(top_data[d], 0.), 1.);
}
}
// set the variance. 除以variance是对预测box和真实box的误差进行放大,从而增加loss,增大梯度,加快收敛。
top_data += top[0]->offset(0, 1);
if (variance_.size() == 1) {
caffe_set<Dtype>(dim, Dtype(variance_[0]), top_data);// 用常数variance_[0]对top_data进行初始化
} else {
int count = 0;
for (int h = 0; h < layer_height; ++h) {
for (int w = 0; w < layer_width; ++w) {
for (int i = 0; i < num_priors_; ++i) {
for (int j = 0; j < 4; ++j) {
top_data[count] = variance_[j];
++count;
}
}
}
}
}
}
INSTANTIATE_CLASS(PriorBoxLayer);
REGISTER_LAYER_CLASS(PriorBox);
} // namespace caffe
整个prior层以feature map和data层作为输入,为feature map每个点考虑num_prior个prioi box,输出shape为(1,2,layer_height * layer_width * num_priors_ * 4),也就是2个channel,第一个channel存放每个prioi box映射回原图的位置信息,第二个channel存放每个prioi box的varience信息.其实prior box就和anchor差不多,只不过前者在多scale的featurp map上获得且个数不为9.
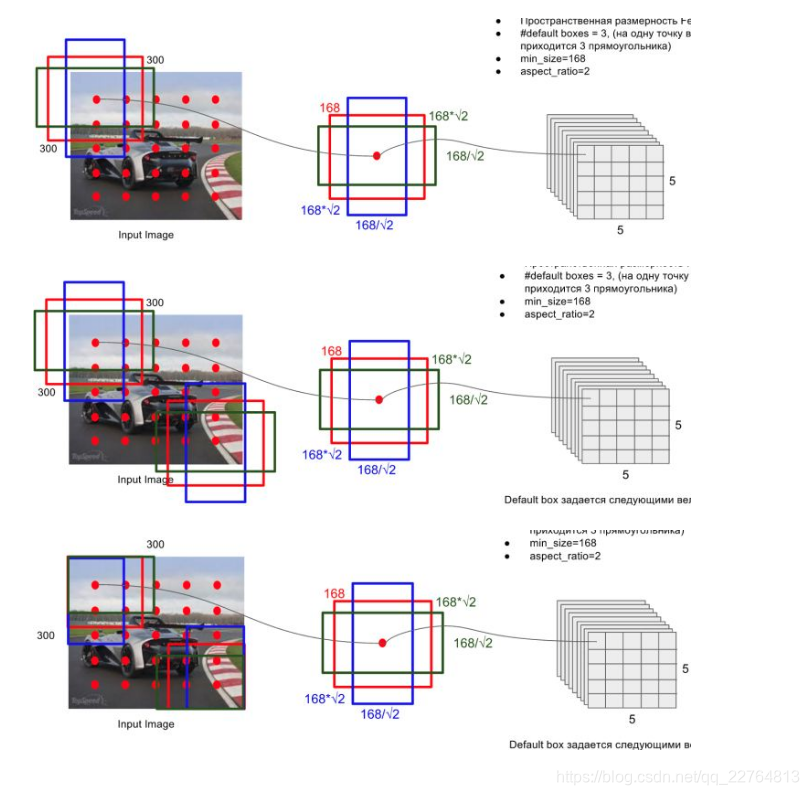
盗用知乎上的一张图来帮助理解:先将feature map上的每个点对应到300*300的img上,作为中心点.依此中心点做出num_prior个prior box,再把各个超出边界的box拉回来(前提是clip=true).
参考:SSD网络解析之PriorBox层_走的那么干脆的博客-CSDN博客_priorbox
参考:目标检测:SSD目标检测中PriorBox代码解读_BigCowPeking的博客-CSDN博客_priorbox


















 5007
5007

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











