







machinekit:
官方网站
http://www.machinekit.io/
machinekit 从linuxcnc 分支过来:
有点点区别,、
https://github.com/machinekit
hal 可以分开来使用,也就是有些只有hal 层,可以单独用hal 来开发别的产品,不是只有3d打印机,机床和机械手的地方:machinekit-hal
QtQuickVcp: 这个是远程桌面功能,
MachinekitClient远程客户端,服务端在设备上面,
客户端可以安装在ios ,android linux windows mac 等多种操作系统 上面
服务端上面有放QT写好的界面:
界面文件示例有
这些文件是有放在远程服务端上面,也是就机床运行时态的操作系统 上面
:客户端 MachinekitClient 安装在android ios windows mac 等系统 上面,在同一个网络上面,
MachinekitClient 输入ip 等信息,连接远程的服务端,服务器有开起上面操作 才能连接上,
Machinekit Vagrant.
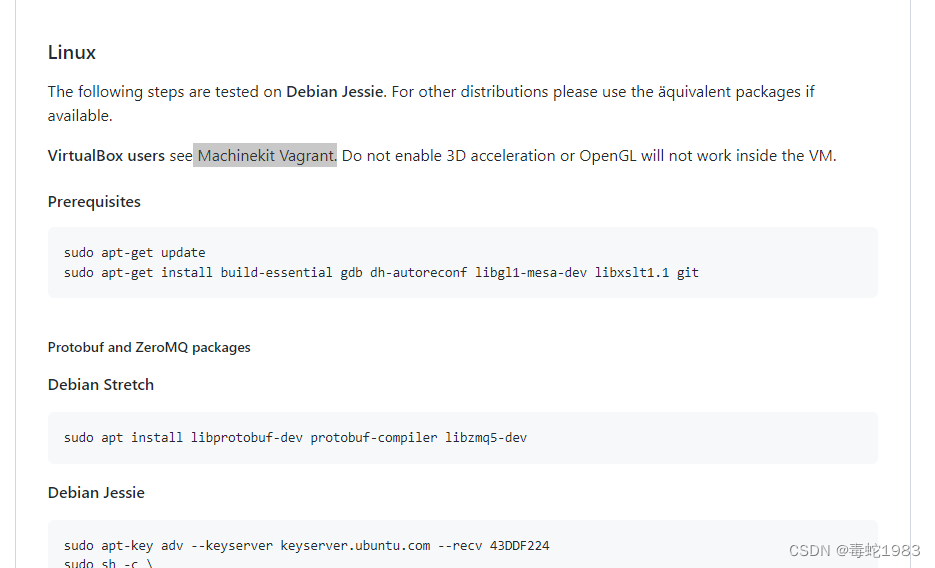
Vagrant 安装是开发环境,VirtualBox ,在操作 vagrant 有细心等一下,有等到操作系统完全安装成功之后才看系统 图形界面,vagrant 是帮助搭配开发环境用的,会自动安装Debian 系统 QtQuick Virtual Control Panel
远程SDK 开发环境:Vagrant
Machinekit体系结构
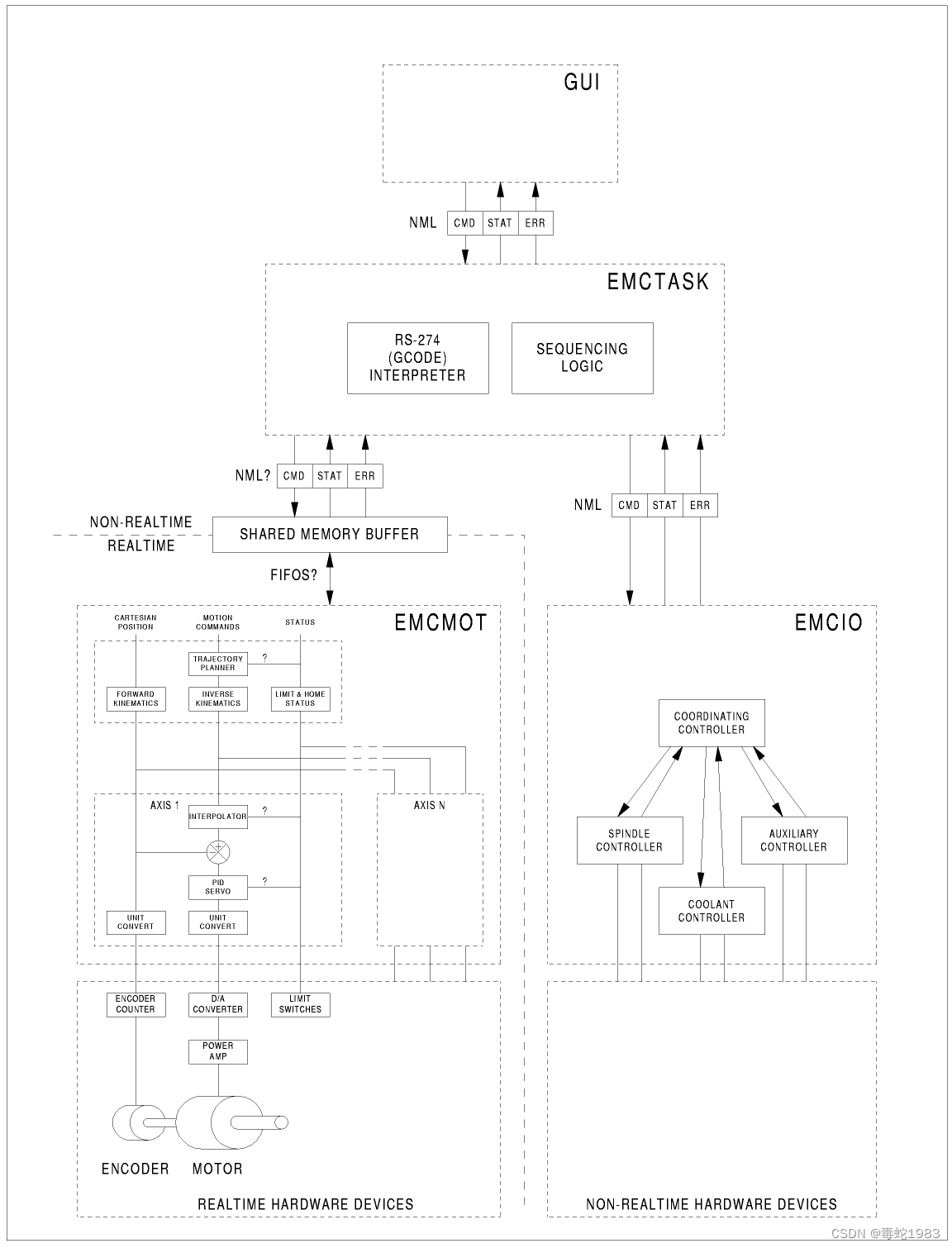
下面层是分成 实时和非实时, Machinekit支持两个实时内核补丁,RT PREEMPT和 Xenomai
,RT PREEMPT 可以直接用 glibc 的接口,也就是说实时的api 和liunx原始写法没什么区别,
Xenomai 不一样,有单独api ,
系统原码已经封装了rtapi ,也就是封好底层 实时补丁的差别。
离散IO控制器(EMCIO)非实时 : 运动控制器(EMCMOT)实时api
任务执行器(EMCTASK): 里边有rs247 也就是SAI , SAI的全称中文意思,独立的解析器,这个用于Gcode ,可以单独编译出来的使用的
Machinekit架构包主要四个组件:
1.文本模式和图形用户界面。
2.任务执行器(EMCTASK)
3离散IO控制器(EMCIO)
4运动控制器(EMCMOT)















 2181
2181











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









