







文章目录
写在前面
致敬大佬!
毫无疑问,传感器集成属于机器人系统未来发展的关键技术之一。本章介绍了在线轨迹生成(OTG)及其与机器人技术领域的(多)传感器集成和基于传感器的控制的关系。此外,它还包含了这本专著的简要概述。
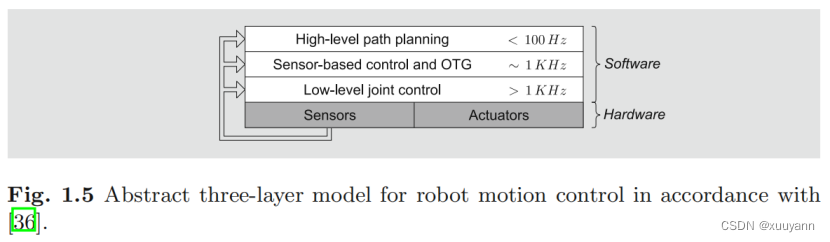
机器人运动控制
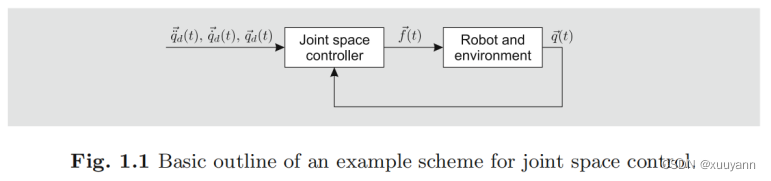
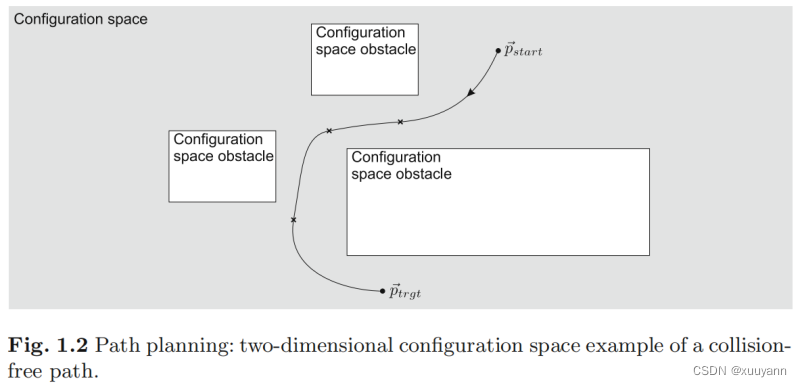
路径规划与轨迹跟踪
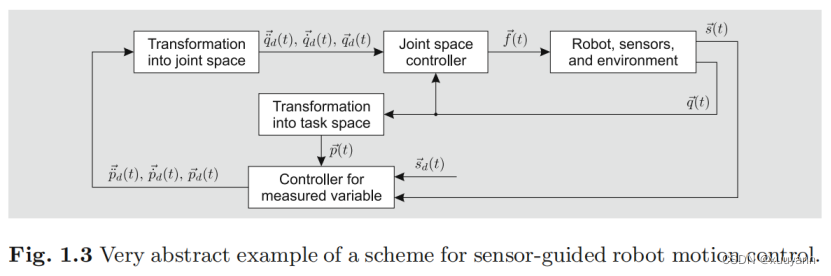
基于传感器制导的机器人运动控制
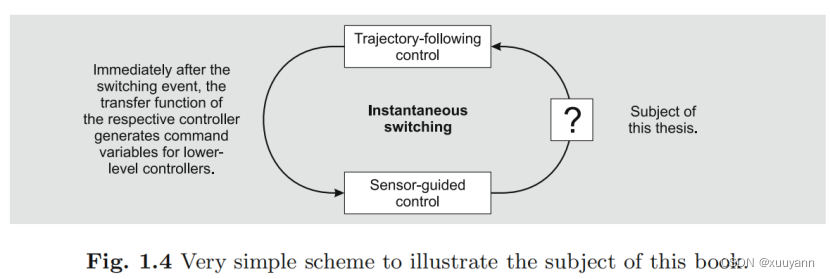
这本书的语言问题的制定和动机
定义:“sensor-guarded”机器人运动控制
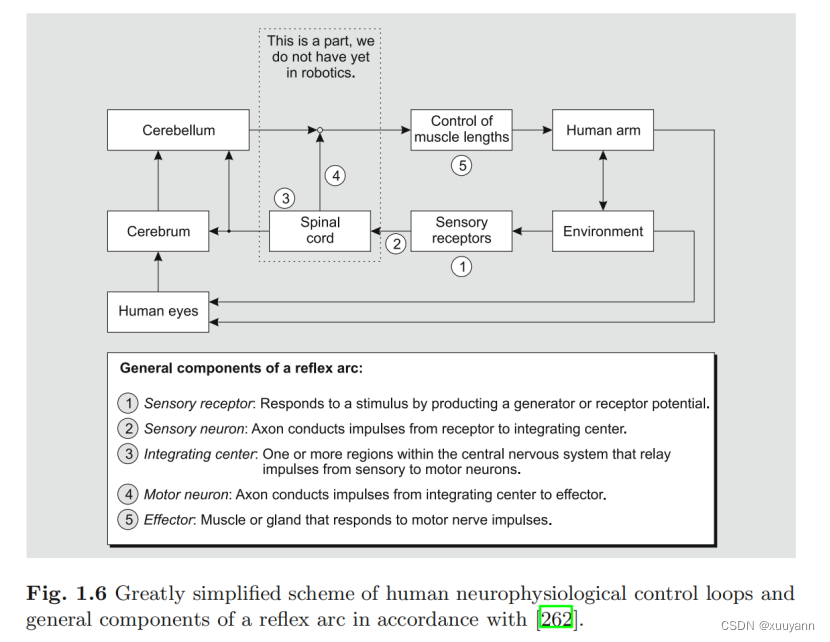
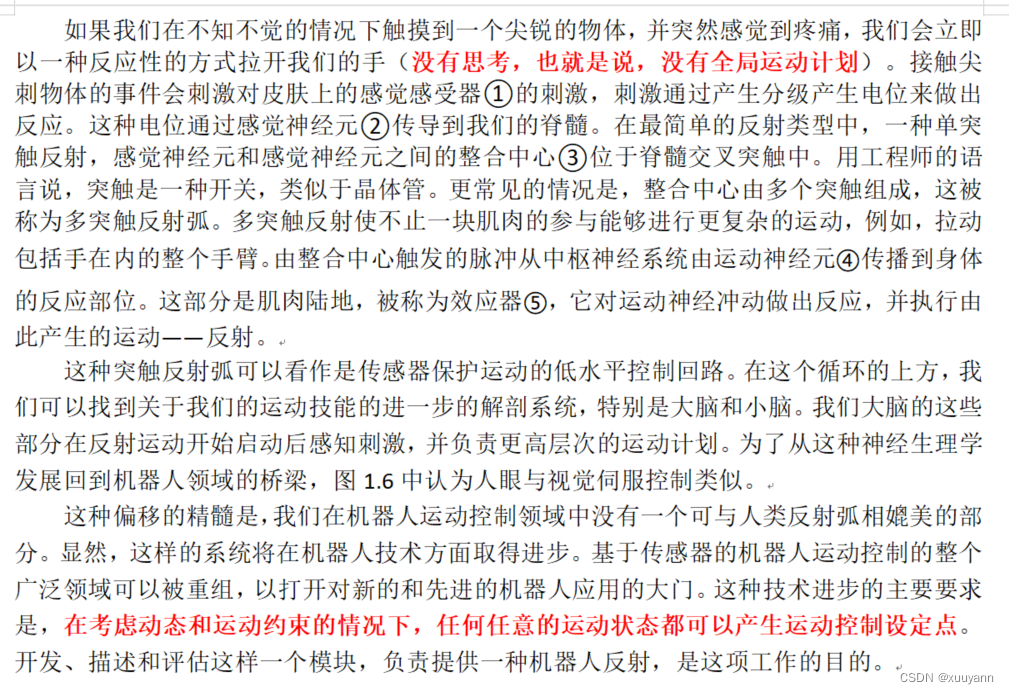
游走:人类的神经生理系统
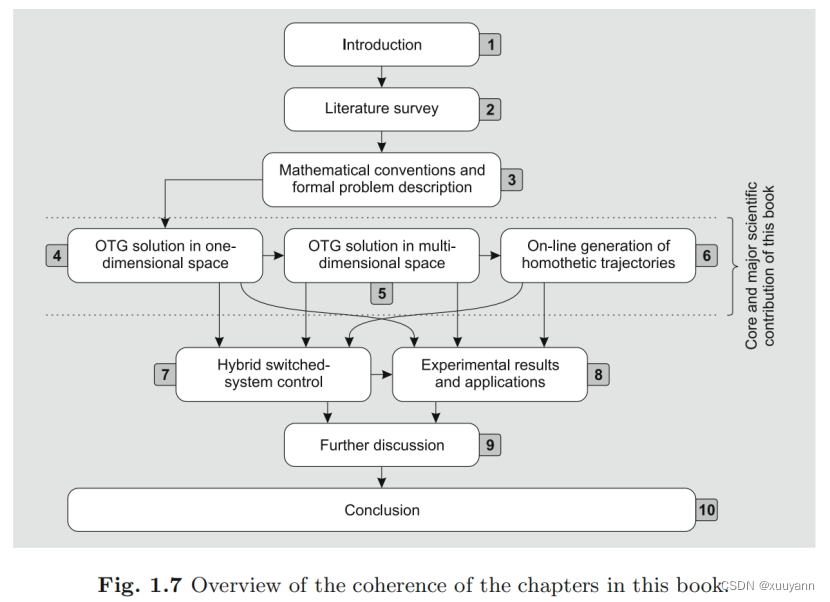
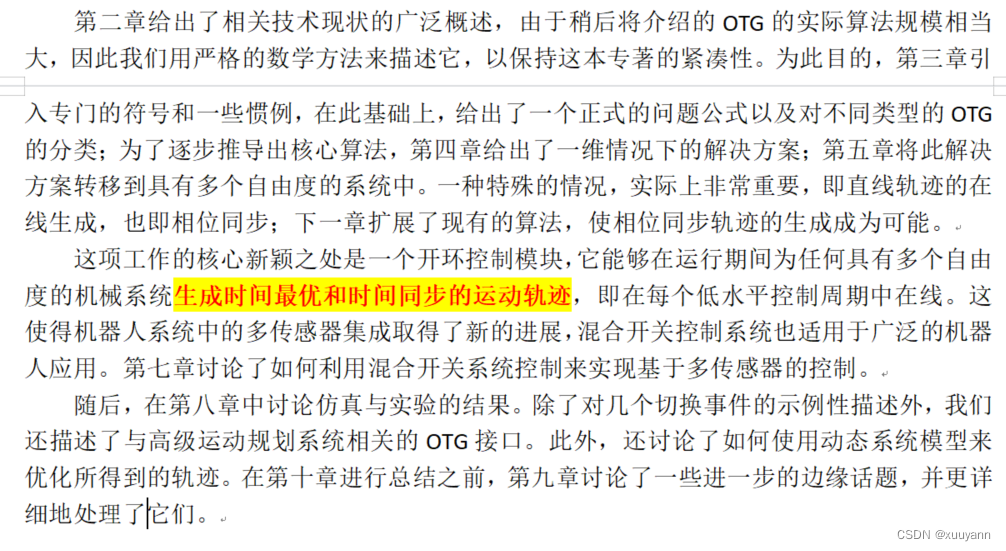
On-Line这本书的概要
参考文献
大佬:Torsten Kröger
V-rep学习笔记:Reflexxes Motion Library 1
V-rep学习笔记:Reflexxes Motion Library 2
V-rep学习笔记:Reflexxes Motion Library 3
T. Kröger and F. M. Wahl, “Online Trajectory Generation: Basic Concepts for Instantaneous Reactions to Unforeseen Events,” in IEEE Transactions on Robotics, vol. 26, no. 1, pp. 94-111, Feb. 2010, doi: 10.1109/TRO.2009.2035744.
T. Kroeger.
On-Line Trajectory Generation in Robotic Systems.
First edition, Springer Tracts in Advanced Robotics, Vol. 58, Springerverlag, Berlin/Heidelberg, Germany, January 2010.


















 2067
2067

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











