







ADRC自抗扰控制基本思想要点:
1.标准型与总扰动,扩张状态与扰动整体辨识,微分信号生成与安排过渡过程以及扰动的消减与控制量产生。
ADRC主要构成:
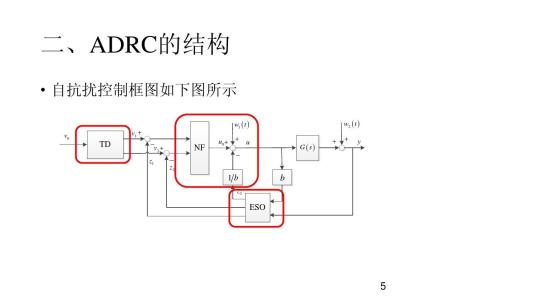
1>跟踪微分器(TD)
解决由不连续或带随机噪声的量测信号,合理提取连续信号(跟踪给定)及微分信号的问题。
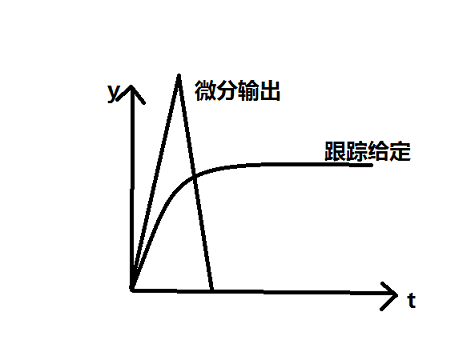
根据微分输出与最速综合函数,可以安排闭环系统的过渡过程。
以单位阶跃信号为例,经过跟踪微分器的过渡,产生的输出效果为:
特点:1>使误差反馈增益和误差微分增益选取范围扩大
2>使给定的反馈增益所适应的对象参数范围扩大提高鲁棒性
2>扩张状态观测器(ESO)
状态观测器将影响被控对象输出的扰动作用扩张成新的状态变量,通过特殊的反馈机制观测被扩张的总扰动信号
通过输入,输出构建总扰动为一个状态变量,二阶的系统,他的扩张观测器达到三阶,加入了总扰动的状态。
总扰动中包含系统内部扰动和外部高频噪声干扰,
扩张状态观测器的输出为:Z1=y ,Z2=dy ,Z3(观测到的系统总扰动)
3>非线性状态误差反馈控制律(NLSEF)
根据跟踪微分器(TD)得出的给定信号和给定信号的微分与状态观测器观测到的系统输出和输出的导数的误差,进而进行控制和扰动补偿,非线性控制方法由fal或最速控制综合函数Fhan构造。

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









