







电感矩阵学习
BLDC中三相线圈有自感,同时又有互感实际上是一个矩阵,关系较为复杂,先前认为线圈电感都是一样的,推导出的dq轴电压方程 L d = L q L_d=L_q Ld=Lq,后来学习了其他资料知道凸极效应的存在,它将导致 L d < L q L_d<L_q Ld<Lq。这里将学到的知识加以整理归纳并推导BLDC的三相线圈的电感。
前言
通过网上收集的资料加以消化,力求说明白 L d , L q L_d,L_q Ld,Lq的物理概念,并对三相线圈的电感矩阵进行了完整的推导。
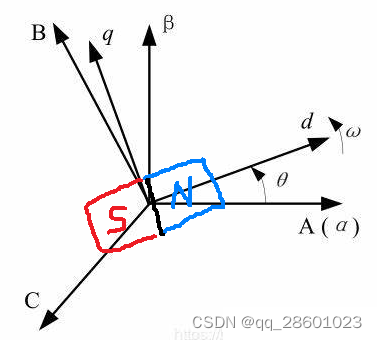
一、从dq轴坐标系说起
为了实施矢量控制我们从
A
B
C
ABC
ABC坐标转换到了
α
β
\alpha\beta
αβ坐标,最后经过一个
θ
\theta
θ角旋转,使得
d
q
dq
dq坐标系中,
d
d
d轴与永磁体转子固连,并且顺着永磁体磁场的方向,
q
q
q轴垂直于永磁体转子的磁场方向。
二、从物理上来看 L d , L q L_d,L_q Ld,Lq的定性关系
由上面的图定性来看如果仅有永磁体,那么对于
d
,
q
d,q
d,q轴线圈产生的磁场来讲,永磁体对于外磁场的磁化反应来看基本上没有作用,就像空气一样,那么
L
d
≈
L
q
L_d≈L_q
Ld≈Lq。这就是没有凸极效应的情况下得到的定性结果。接下来的过程中需要看懂实际情况中
d
,
q
d,q
d,q轴的磁路。
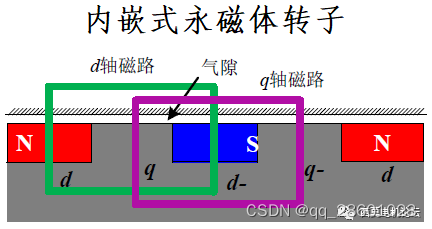
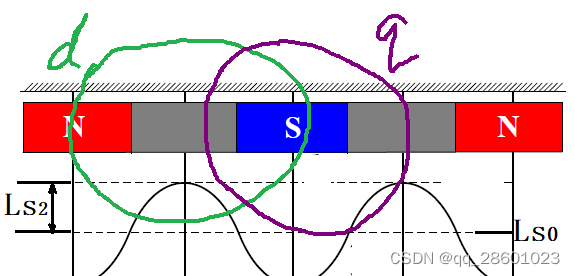
在西莫电机论坛中看到大牛讲《电机控制中的电感问题》,其中说到内嵌式永磁体转子如下图所示:
灰色的式铁心,对于小白来讲,刚开始我确实每没看懂,心中各种嘀咕“什么玩样儿!!!”,经过一番煎熬,自认为是看懂了,大致应该是这样演变过去的:
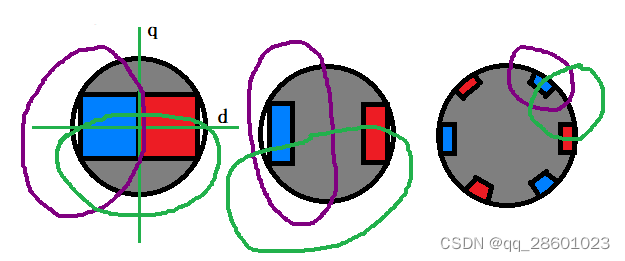
其中灰色为铁心,绿色的磁路为
d
d
d轴磁路,紫色的磁路为
q
q
q轴磁路,当极对数增多时,
d
,
q
d,q
d,q之间的电角度当然还是90°,但对应的机械角度为90°/极对数。当极对数比较多时我们干脆把圆弧铺平了看,于是就得到了内嵌式永磁体转子上面的那个图。
我们看到
d
d
d轴磁路穿过了永磁铁,而永磁铁不像铁心对线圈产生的磁场是没有增强(磁化)作用的,因此一般
q
q
q轴的电感回比
d
d
d轴的电感大,即
L
q
>
L
d
L_q>L_d
Lq>Ld。
同理表贴式永磁体转子的结构如下:
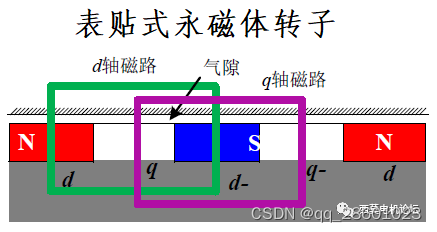
显然按照先前的看法,永磁铁
S
,
N
S,N
S,N的磁化效果相当于空气,因此如果使用这种转子,则
L
q
≈
L
d
L_q≈L_d
Lq≈Ld。
看到这里我才恍然大悟,之前的理解真是肤浅啊。
三、三相线圈的自感
接下来开始定量讨论问题,作为进行下去的前置条件,我们必须对线圈的电感进行比较深入的讨论。
首先来看线圈自感,由上面的内容可知:
表贴式转子自感为常数。
但是内嵌式转子自感是随角度周期变化的,为了简化计算,我们对这种周期性的大小变化,我们近似看成正弦变化规律。自感大小的变化规律如下图所示:
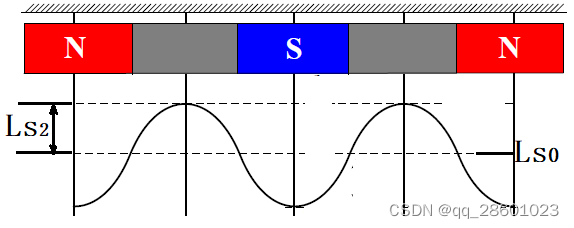
上图以
d
,
q
d,q
d,q坐标系为参考系,注意都在一个360°的电角度内,自感值周期性变化了两次(即变化速度2倍于电角度
θ
\theta
θ),
L
s
0
L_{s0}
Ls0是平均自感,
L
s
2
L_{s2}
Ls2是自感变动幅度,所以我们得到三线线圈自感的计算公式(公式中
θ
\theta
θ为
d
d
d轴于
A
A
A相线圈的电角度,但查找自感的变化时角度是以
d
d
d轴为参考边的):
内嵌式永磁体转子自感:
{
L
a
a
=
L
s
0
−
L
s
2
c
o
s
(
2
θ
)
L
b
b
=
L
s
0
−
L
s
2
c
o
s
(
2
(
θ
−
2
π
3
)
)
L
c
c
=
L
s
0
−
L
s
2
c
o
s
(
2
(
θ
+
2
π
3
)
)
…
…
1
\left\{ \begin{aligned} L_{aa}&=L_{s0}-L_{s2}cos(2\theta)\\ L_{bb}&=L_{s0}-L_{s2}cos(2(\theta-\frac{2\pi}{3}))\\ L_{cc}&=L_{s0}-L_{s2}cos(2(\theta+\frac{2\pi}{3})) \end{aligned} \right. ……1
⎩⎪⎪⎪⎪⎨⎪⎪⎪⎪⎧LaaLbbLcc=Ls0−Ls2cos(2θ)=Ls0−Ls2cos(2(θ−32π))=Ls0−Ls2cos(2(θ+32π))……1
贴片式永磁体转子自感:
{
L
a
a
=
L
s
0
L
b
b
=
L
s
0
L
c
c
=
L
s
0
…
…
2
\left\{ \begin{aligned} L_{aa}&=L_{s0}\\ L_{bb}&=L_{s0}\\ L_{cc}&=L_{s0} \end{aligned} \right. ……2
⎩⎪⎨⎪⎧LaaLbbLcc=Ls0=Ls0=Ls0……2
四、三相线圈的互感
作为小白刚刚开始可没有看懂大牛关于互感的计算,自己又想不出好的办法,后来又各种查找资料思考,终于悟出了其中的道理,由于永磁体转子的存在,互感磁路情况非常复杂,困难在于两方面:
第一,永磁体存在,磁场路径可以部分通过磁铁部分通过下图的灰色铁心。
第二,电角度不同,两个绕组的互感磁链的情况有所变化。
那么怎么样才能正确地求出互感呢?原来我们可以把任意一相绕组的磁通分解成上图中的紫色
q
q
q轴磁通以及绿色的
d
d
d轴磁通,这两个磁通在各自的路径路径上磁阻就是各自固定的,那么我们就只需要专心考虑电角度旋转造成的效应就可以了,我不禁要感叹,发明这些方法的人太牛逼了!
那么接下来的工作就是分解某线圈的磁通到
d
,
q
d,q
d,q轴上,然后再投影到被互感的线圈上就可以了:
根据磁路欧姆定律:
d
d
d轴与A相夹角为
θ
\theta
θ,但由于
d
d
d轴方向和
q
q
q轴方向的磁阻不同,所以我们不能直接分解磁通,而是应该先分解磁动势。假设某相线圈磁动势为
F
=
N
i
F=Ni
F=Ni,则在
d
,
q
d,q
d,q方向分解后有(注意这个分解以
d
,
q
d,q
d,q坐标系为参考系,因此
A
A
A相的角度实际上因标注为
−
θ
-\theta
−θ):
{
F
d
=
F
c
o
s
θ
=
N
i
a
c
o
s
θ
F
q
=
−
F
s
i
n
θ
=
−
N
i
a
s
i
n
θ
\left\{ \begin{aligned} F_d&=Fcos\theta=Ni_acos\theta\\ F_q&=-Fsin\theta=-Ni_asin\theta \end{aligned} \right.
{FdFq=Fcosθ=Niacosθ=−Fsinθ=−Niasinθ
则:
{
ϕ
d
=
F
d
R
m
d
=
N
R
m
d
i
a
c
o
s
θ
ϕ
q
=
F
q
R
m
q
=
−
N
R
m
q
i
a
s
i
n
θ
\left\{ \begin{aligned} {\phi}_d&=\frac{F_d}{R_{md}}=\frac{N}{R_{md}}i_acos\theta\\ {\phi}_q&=\frac{F_q}{R_{mq}}=-\frac{N}{R_{mq}}i_asin\theta \end{aligned} \right.
⎩⎪⎪⎨⎪⎪⎧ϕdϕq=RmdFd=RmdNiacosθ=RmqFq=−RmqNiasinθ
然后将
ϕ
d
,
ϕ
q
{\phi}_d,{\phi}_q
ϕd,ϕq投影到b轴上:
ϕ
b
a
=
ϕ
d
c
o
s
(
θ
−
2
π
3
)
+
ϕ
q
c
o
s
(
θ
−
2
π
3
+
π
2
)
=
ϕ
d
c
o
s
(
θ
−
2
π
3
)
−
ϕ
q
s
i
n
(
θ
−
2
π
3
)
{\phi}_{ba}=\phi_dcos(\theta-\frac{2\pi}{3})+{\phi}_qcos(\theta-\frac{2\pi}{3}+\frac{\pi}{2})={\phi}_dcos(\theta-\frac{2\pi}{3})-{\phi}_qsin(\theta-\frac{2\pi}{3})
ϕba=ϕdcos(θ−32π)+ϕqcos(θ−32π+2π)=ϕdcos(θ−32π)−ϕqsin(θ−32π)
即:
ϕ
b
a
=
N
R
m
d
i
a
c
o
s
θ
c
o
s
(
θ
−
2
π
3
)
+
N
R
m
q
i
a
s
i
n
θ
s
i
n
(
θ
−
2
π
3
)
{\phi}_{ba}=\frac{N}{R_{md}}i_acos{\theta}cos(\theta-\frac{2\pi}{3})+\frac{N}{R_{mq}}i_asin{\theta}sin(\theta-\frac{2\pi}{3})
ϕba=RmdNiacosθcos(θ−32π)+RmqNiasinθsin(θ−32π)
则由
A
A
A相线圈交链到
B
B
B相线圈的磁链为:
ψ
b
a
=
N
2
R
m
d
i
a
c
o
s
θ
c
o
s
(
θ
−
2
π
3
)
+
N
2
R
m
q
i
a
s
i
n
θ
s
i
n
(
θ
−
2
π
3
)
{\psi}_{ba}=\frac{N^2}{R_{md}}i_acos{\theta}cos(\theta-\frac{2\pi}{3})+\frac{N^2}{R_{mq}}i_asin{\theta}sin(\theta-\frac{2\pi}{3})
ψba=RmdN2iacosθcos(θ−32π)+RmqN2iasinθsin(θ−32π)。
求
A
A
A相线圈交链到
C
C
C相线圈的磁链,只需要把
θ
−
2
π
3
\theta-\frac{2\pi}{3}
θ−32π替换成
θ
+
2
π
3
\theta+\frac{2\pi}{3}
θ+32π。
求
C
C
C相线圈交链到
B
B
B相线圈的磁链,只需要把
θ
\theta
θ替换成
θ
+
2
π
3
\theta+\frac{2\pi}{3}
θ+32π。
我们把关系整理一下:
{
ψ
b
a
=
N
2
R
m
d
i
a
c
o
s
θ
c
o
s
(
θ
−
2
π
3
)
+
N
2
R
m
q
i
a
s
i
n
θ
s
i
n
(
θ
−
2
π
3
)
ψ
c
a
=
N
2
R
m
d
i
a
c
o
s
θ
c
o
s
(
θ
+
2
π
3
)
+
N
2
R
m
q
i
a
s
i
n
θ
s
i
n
(
θ
+
2
π
3
)
ψ
b
c
=
N
2
R
m
d
i
c
c
o
s
(
θ
+
2
π
3
)
c
o
s
(
θ
−
2
π
3
)
+
N
2
R
m
q
i
c
s
i
n
(
θ
+
2
π
3
)
s
i
n
(
θ
−
2
π
3
)
\left\{ \begin{aligned} {\psi}_{ba}&=\frac{N^2}{R_{md}}i_acos{\theta}cos(\theta-\frac{2\pi}{3})+\frac{N^2}{R_{mq}}i_asin{\theta}sin(\theta-\frac{2\pi}{3})\\ {\psi}_{ca}&=\frac{N^2}{R_{md}}i_acos{\theta}cos(\theta+\frac{2\pi}{3})+\frac{N^2}{R_{mq}}i_asin{\theta}sin(\theta+\frac{2\pi}{3})\\ {\psi}_{bc}&=\frac{N^2}{R_{md}}i_ccos(\theta+\frac{2\pi}{3})cos(\theta-\frac{2\pi}{3})+\frac{N^2}{R_{mq}}i_csin(\theta+\frac{2\pi}{3})sin(\theta-\frac{2\pi}{3}) \end{aligned} \right.
⎩⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎧ψbaψcaψbc=RmdN2iacosθcos(θ−32π)+RmqN2iasinθsin(θ−32π)=RmdN2iacosθcos(θ+32π)+RmqN2iasinθsin(θ+32π)=RmdN2iccos(θ+32π)cos(θ−32π)+RmqN2icsin(θ+32π)sin(θ−32π)
根据互感的定义以及上式可得:
{
M
b
a
=
N
2
R
m
d
c
o
s
θ
c
o
s
(
θ
−
2
π
3
)
+
N
2
R
m
q
s
i
n
θ
s
i
n
(
θ
−
2
π
3
)
M
c
a
=
N
2
R
m
d
c
o
s
θ
c
o
s
(
θ
+
2
π
3
)
+
N
2
R
m
q
s
i
n
θ
s
i
n
(
θ
+
2
π
3
)
M
b
c
=
N
2
R
m
d
c
o
s
(
θ
+
2
π
3
)
c
o
s
(
θ
−
2
π
3
)
+
N
2
R
m
q
s
i
n
(
θ
+
2
π
3
)
s
i
n
(
θ
−
2
π
3
)
…
…
3
\left\{ \begin{aligned} M_{ba}&=\frac{N^2}{R_{md}}cos{\theta}cos(\theta-\frac{2\pi}{3})+\frac{N^2}{R_{mq}}sin{\theta}sin(\theta-\frac{2\pi}{3})\\ M_{ca}&=\frac{N^2}{R_{md}}cos{\theta}cos(\theta+\frac{2\pi}{3})+\frac{N^2}{R_{mq}}sin{\theta}sin(\theta+\frac{2\pi}{3})\\ M_{bc}&=\frac{N^2}{R_{md}}cos(\theta+\frac{2\pi}{3})cos(\theta-\frac{2\pi}{3})+\frac{N^2}{R_{mq}}sin(\theta+\frac{2\pi}{3})sin(\theta-\frac{2\pi}{3}) \end{aligned} \right. ……3
⎩⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎧MbaMcaMbc=RmdN2cosθcos(θ−32π)+RmqN2sinθsin(θ−32π)=RmdN2cosθcos(θ+32π)+RmqN2sinθsin(θ+32π)=RmdN2cos(θ+32π)cos(θ−32π)+RmqN2sin(θ+32π)sin(θ−32π)……3
注意
d
d
d轴到
A
B
C
ABC
ABC的夹角(有方向,并以
A
B
C
ABC
ABC为起始边)分别为:
θ
,
θ
−
2
π
3
,
θ
+
2
π
3
\theta,\theta-\frac{2\pi}{3},\theta+\frac{2\pi}{3}
θ,θ−32π,θ+32π。
而
q
q
q轴到
A
B
C
ABC
ABC的夹角(有方向,并以
A
B
C
ABC
ABC为起始边)分别为:
θ
+
π
2
,
θ
−
2
π
3
+
π
2
,
θ
+
2
π
3
+
π
2
\theta+\frac{\pi}{2},\theta-\frac{2\pi}{3}+\frac{\pi}{2},\theta+\frac{2\pi}{3}+\frac{\pi}{2}
θ+2π,θ−32π+2π,θ+32π+2π。
再注意到互感公式的对称性可知:
M
a
b
=
M
b
a
,
M
b
c
=
M
c
b
,
M
c
a
=
M
a
c
…
…
4
M_{ab}=M_{ba},M_{bc}=M_{cb},M_{ca}=M_{ac}……4
Mab=Mba,Mbc=Mcb,Mca=Mac……4
另外观察图形中的磁链以及电感的周期规律,并借助电感的计算公式可知:
{
L
s
0
−
L
s
2
=
N
2
R
m
d
L
s
0
+
L
s
2
=
N
2
R
m
q
…
…
5
\left\{ \begin{aligned} L_{s0}-L_{s2}=\frac{N^2}{R_{md}}\\ L_{s0}+L_{s2}=\frac{N^2}{R_{mq}} \end{aligned} \right.……5
⎩⎪⎪⎪⎨⎪⎪⎪⎧Ls0−Ls2=RmdN2Ls0+Ls2=RmqN2……5
其中3式使用和差化积可得:
{
M
a
b
=
M
b
a
=
−
1
4
(
N
2
R
m
d
+
N
2
R
m
q
)
−
1
2
(
N
2
R
m
q
−
N
2
R
m
d
)
c
o
s
(
2
θ
−
2
π
3
)
M
b
c
=
M
c
b
=
−
1
4
(
N
2
R
m
d
+
N
2
R
m
q
)
−
1
2
(
N
2
R
m
q
−
N
2
R
m
d
)
c
o
s
(
2
θ
)
M
c
a
=
M
a
c
=
−
1
4
(
N
2
R
m
d
+
N
2
R
m
q
)
−
1
2
(
N
2
R
m
q
−
N
2
R
m
d
)
c
o
s
(
2
θ
+
2
π
3
)
…
…
6
\left\{ \begin{aligned} M_{ab}=M_{ba}&=-\frac{1}{4}(\frac{N^2}{R_{md}}+\frac{N^2}{R_{mq}})-\frac{1}{2}(\frac{N^2}{R_{mq}}-\frac{N^2}{R_{md}})cos(2\theta-\frac{2\pi}{3})\\ M_{bc}=M_{cb}&=-\frac{1}{4}(\frac{N^2}{R_{md}}+\frac{N^2}{R_{mq}})-\frac{1}{2}(\frac{N^2}{R_{mq}}-\frac{N^2}{R_{md}})cos(2\theta)\\ M_{ca}=M_{ac}&=-\frac{1}{4}(\frac{N^2}{R_{md}}+\frac{N^2}{R_{mq}})-\frac{1}{2}(\frac{N^2}{R_{mq}}-\frac{N^2}{R_{md}})cos(2\theta+\frac{2\pi}{3}) \end{aligned} \right. ……6
⎩⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎧Mab=MbaMbc=McbMca=Mac=−41(RmdN2+RmqN2)−21(RmqN2−RmdN2)cos(2θ−32π)=−41(RmdN2+RmqN2)−21(RmqN2−RmdN2)cos(2θ)=−41(RmdN2+RmqN2)−21(RmqN2−RmdN2)cos(2θ+32π)……6
利用5式化简6式可得三相线圈间互感公式:
{
M
a
b
=
M
b
a
=
−
L
s
0
2
−
L
s
2
c
o
s
(
2
θ
−
2
π
3
)
M
b
c
=
M
c
b
=
−
L
s
0
2
−
L
s
2
c
o
s
(
2
θ
)
M
c
a
=
M
a
c
=
−
L
s
0
2
−
L
s
2
c
o
s
(
2
θ
+
2
π
3
)
…
…
7
\left\{ \begin{aligned} M_{ab}=M_{ba}&=-\frac{L_{s0}}{2}-L_{s2}cos(2\theta-\frac{2\pi}{3})\\ M_{bc}=M_{cb}&=-\frac{L_{s0}}{2}-L_{s2}cos(2\theta)\\ M_{ca}=M_{ac}&=-\frac{L_{s0}}{2}-L_{s2}cos(2\theta+\frac{2\pi}{3}) \end{aligned} \right. ……7
⎩⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎧Mab=MbaMbc=McbMca=Mac=−2Ls0−Ls2cos(2θ−32π)=−2Ls0−Ls2cos(2θ)=−2Ls0−Ls2cos(2θ+32π)……7
对于表贴式转子当然就有:
{
M
a
b
=
M
b
a
=
−
L
s
0
2
M
b
c
=
M
c
b
=
−
L
s
0
2
M
c
a
=
M
a
c
=
−
L
s
0
2
…
…
8
\left\{ \begin{aligned} M_{ab}=M_{ba}&=-\frac{L_{s0}}{2}\\ M_{bc}=M_{cb}&=-\frac{L_{s0}}{2}\\ M_{ca}=M_{ac}&=-\frac{L_{s0}}{2} \end{aligned} \right. ……8
⎩⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎧Mab=MbaMbc=McbMca=Mac=−2Ls0=−2Ls0=−2Ls0……8
五、综合结论获得电感矩阵
由线圈电流产生的磁链表示为:
[
ψ
i
a
ψ
i
b
ψ
i
c
]
=
[
L
a
a
M
a
b
M
a
c
M
b
a
L
b
b
M
b
c
M
c
a
M
c
b
L
c
c
]
[
i
a
i
b
i
c
]
\begin{bmatrix}\psi_{ia}\\\psi_{ib}\\\psi_{ic}\end{bmatrix} =\begin{bmatrix}L_{aa}&M_{ab}&M_{ac}\\M_{ba}&L_{bb}&M_{bc}\\M_{ca}&M_{cb}&L_{cc}\end{bmatrix} \begin{bmatrix}i_a\\i_b\\i_c\end{bmatrix}
⎣⎡ψiaψibψic⎦⎤=⎣⎡LaaMbaMcaMabLbbMcbMacMbcLcc⎦⎤⎣⎡iaibic⎦⎤
上式的矩阵中的各项带入1式和7式可得:
[
L
a
a
M
a
b
M
a
c
M
b
a
L
b
b
M
b
c
M
c
a
M
c
b
L
c
c
]
=
[
L
s
0
−
L
s
2
c
o
s
(
2
θ
)
−
L
s
0
2
−
L
s
2
c
o
s
(
2
θ
−
2
π
3
)
−
L
s
0
2
−
L
s
2
c
o
s
(
2
θ
+
2
π
3
)
−
L
s
0
2
−
L
s
2
c
o
s
(
2
θ
−
2
π
3
)
L
s
0
−
L
s
2
c
o
s
(
2
(
θ
−
2
π
3
)
)
−
L
s
0
2
−
L
s
2
c
o
s
(
2
θ
)
−
L
s
0
2
−
L
s
2
c
o
s
(
2
θ
+
2
π
3
)
−
L
s
0
2
−
L
s
2
c
o
s
(
2
θ
)
L
s
0
−
L
s
2
c
o
s
(
2
(
θ
+
2
π
3
)
)
]
\begin{bmatrix}L_{aa}&M_{ab}&M_{ac}\\M_{ba}&L_{bb}&M_{bc}\\M_{ca}&M_{cb}&L_{cc}\end{bmatrix} =\begin{bmatrix}L_{s0}-L_{s2}cos(2\theta)&-\frac{L_{s0}}{2}-L_{s2}cos(2\theta-\frac{2\pi}{3})&-\frac{L_{s0}}{2}-L_{s2}cos(2\theta+\frac{2\pi}{3})\\ -\frac{L_{s0}}{2}-L_{s2}cos(2\theta-\frac{2\pi}{3})&L_{s0}-L_{s2}cos(2(\theta-\frac{2\pi}{3}))&-\frac{L_{s0}}{2}-L_{s2}cos(2\theta)\\ -\frac{L_{s0}}{2}-L_{s2}cos(2\theta+\frac{2\pi}{3})&-\frac{L_{s0}}{2}-L_{s2}cos(2\theta)&L_{s0}-L_{s2}cos(2(\theta+\frac{2\pi}{3}))\end{bmatrix}
⎣⎡LaaMbaMcaMabLbbMcbMacMbcLcc⎦⎤=⎣⎡Ls0−Ls2cos(2θ)−2Ls0−Ls2cos(2θ−32π)−2Ls0−Ls2cos(2θ+32π)−2Ls0−Ls2cos(2θ−32π)Ls0−Ls2cos(2(θ−32π))−2Ls0−Ls2cos(2θ)−2Ls0−Ls2cos(2θ+32π)−2Ls0−Ls2cos(2θ)Ls0−Ls2cos(2(θ+32π))⎦⎤
为了方便后面的计算,我们把矩阵分离化简一下写成如下形式:
[
L
a
a
M
a
b
M
a
c
M
b
a
L
b
b
M
b
c
M
c
a
M
c
b
L
c
c
]
=
L
s
0
[
1
−
1
2
−
1
2
−
1
2
1
−
1
2
−
1
2
−
1
2
1
]
−
L
s
2
[
c
o
s
(
2
θ
)
c
o
s
(
2
θ
−
2
π
3
)
c
o
s
(
2
θ
+
2
π
3
)
c
o
s
(
2
θ
−
2
π
3
)
c
o
s
(
2
θ
+
2
π
3
)
c
o
s
(
2
θ
)
c
o
s
(
2
θ
+
2
π
3
)
c
o
s
(
2
θ
)
c
o
s
(
2
θ
−
2
π
3
)
]
\begin{bmatrix}L_{aa}&M_{ab}&M_{ac}\\M_{ba}&L_{bb}&M_{bc}\\M_{ca}&M_{cb}&L_{cc}\end{bmatrix} =L_{s0}\begin{bmatrix}1&-\frac{1}{2}&-\frac{1}{2}\\ -\frac{1}{2}&1&-\frac{1}{2}\\ -\frac{1}{2}&-\frac{1}{2}&1\end{bmatrix} -L_{s2}\begin{bmatrix}cos(2\theta)&cos(2\theta-\frac{2\pi}{3})&cos(2\theta+\frac{2\pi}{3})\\ cos(2\theta-\frac{2\pi}{3})&cos(2\theta+\frac{2\pi}{3})&cos(2\theta)\\ cos(2\theta+\frac{2\pi}{3})&cos(2\theta)&cos(2\theta-\frac{2\pi}{3})\end{bmatrix}
⎣⎡LaaMbaMcaMabLbbMcbMacMbcLcc⎦⎤=Ls0⎣⎡1−21−21−211−21−21−211⎦⎤−Ls2⎣⎡cos(2θ)cos(2θ−32π)cos(2θ+32π)cos(2θ−32π)cos(2θ+32π)cos(2θ)cos(2θ+32π)cos(2θ)cos(2θ−32π)⎦⎤
总结
通过思考和上面的推导,搞明白了 d q dq dq轴电感的物理概念,并且推导出了 A B C ABC ABC三相坐标下,电感矩阵的具体形式。

















 3286
3286

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









