







 本文详细介绍了SLAM(Simultaneous Localization And Mapping)技术的基本概念、环境分类及不同类型的SLAM方法。涵盖了图优化SLAM、基于滤波SLAM等实现方式,并深入探讨了2D与3D激光SLAM的特点和发展趋势。
本文详细介绍了SLAM(Simultaneous Localization And Mapping)技术的基本概念、环境分类及不同类型的SLAM方法。涵盖了图优化SLAM、基于滤波SLAM等实现方式,并深入探讨了2D与3D激光SLAM的特点和发展趋势。
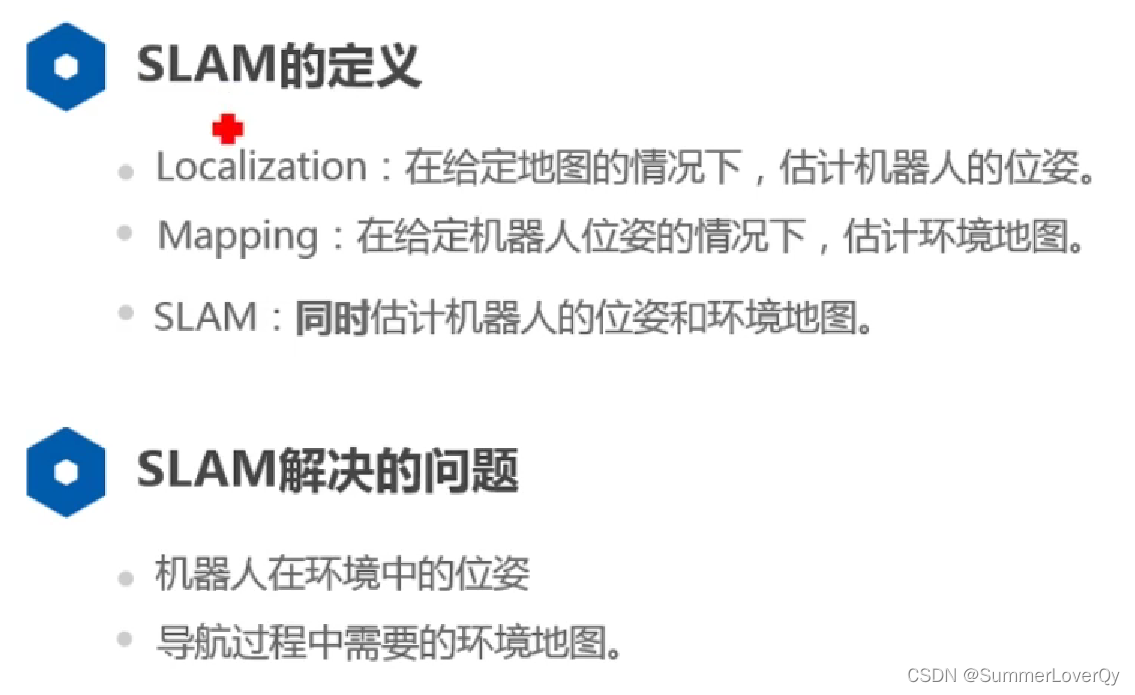
一.SLAM的定义
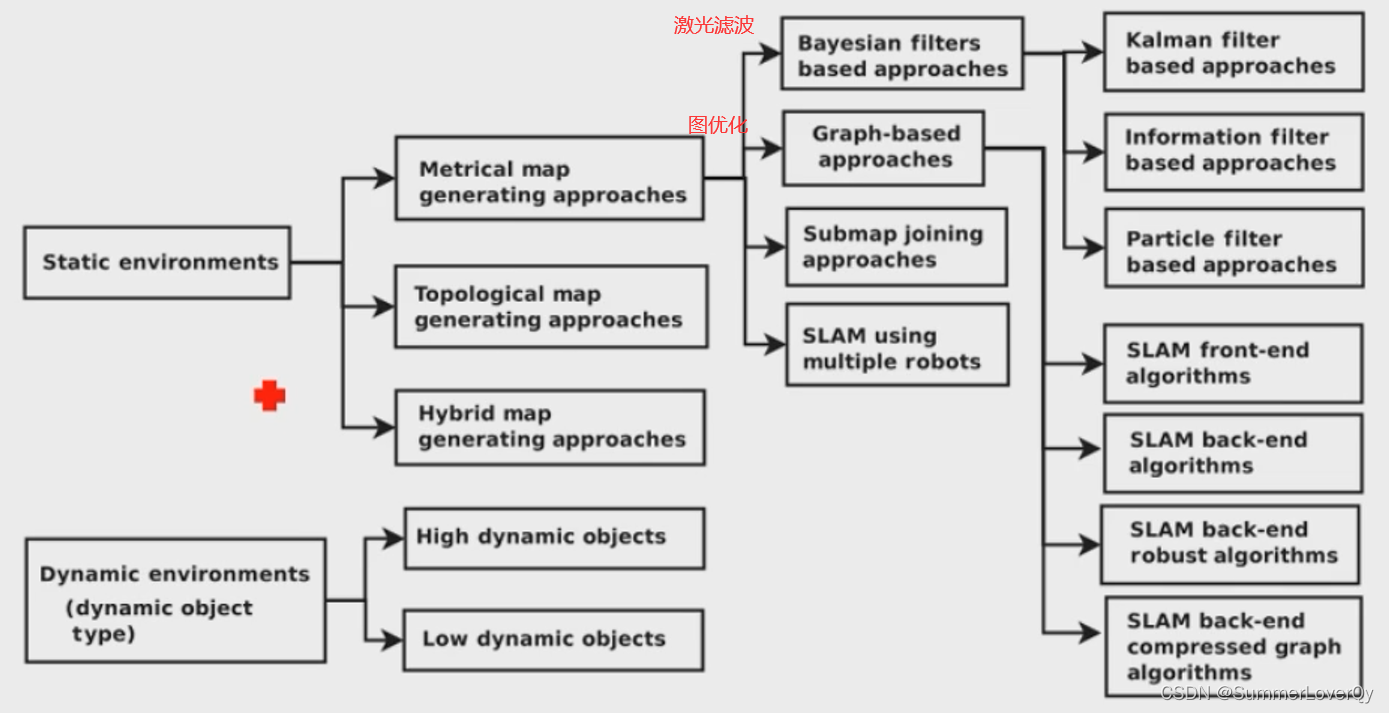
二 环境分类
-
静态环境
尺度地图:目前大部分的建图基本都是该类
拓扑地图:大环境
混合地图:综合以上两个 -
动态环境
三.图优化SLAM
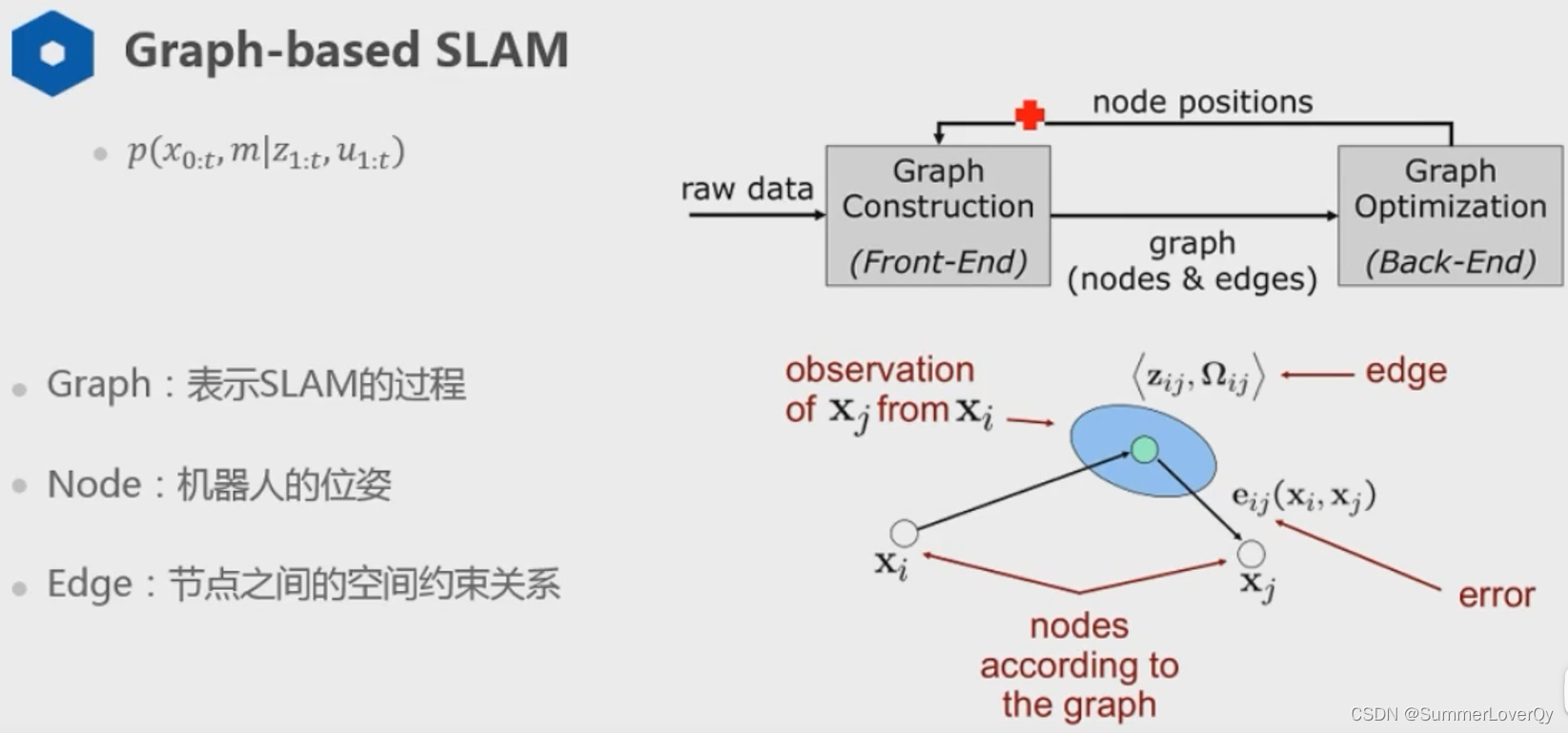
实现分两部分: -
前端:建图部分
-
后端:优化部分
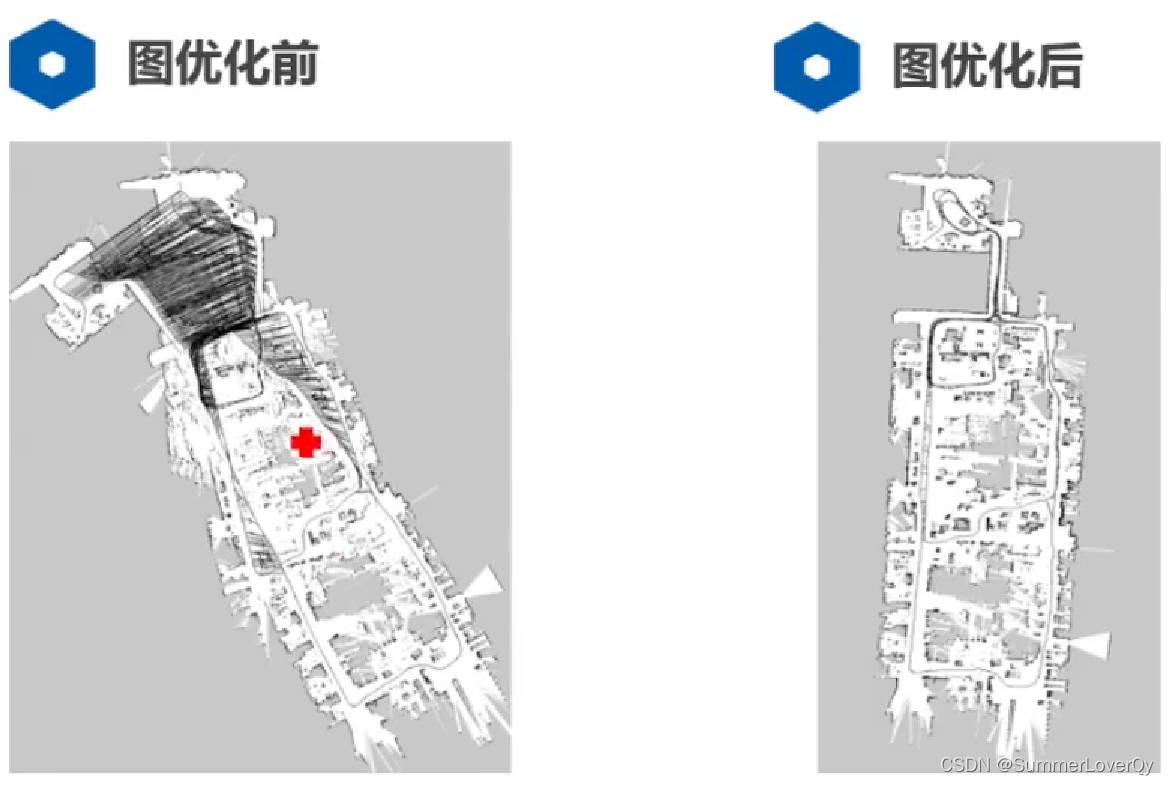
优化效果:
四.基于滤波SLAM
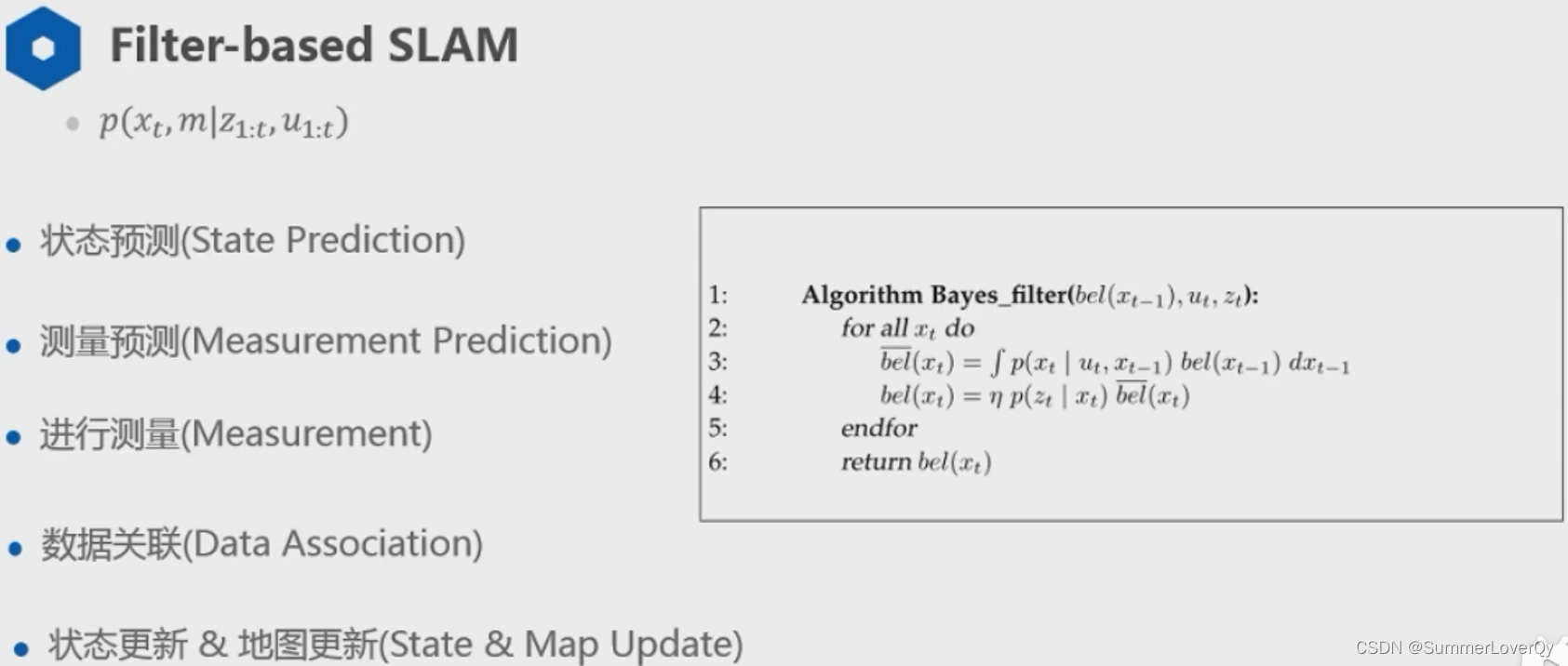
只估计当前时刻位置,出现误差就积累,不适合大环境使用 -
状态预测:可以简单理解为里程计估计当前位置
-
状态更新&地图更新:卡尔曼滤波更新>地图更新
-
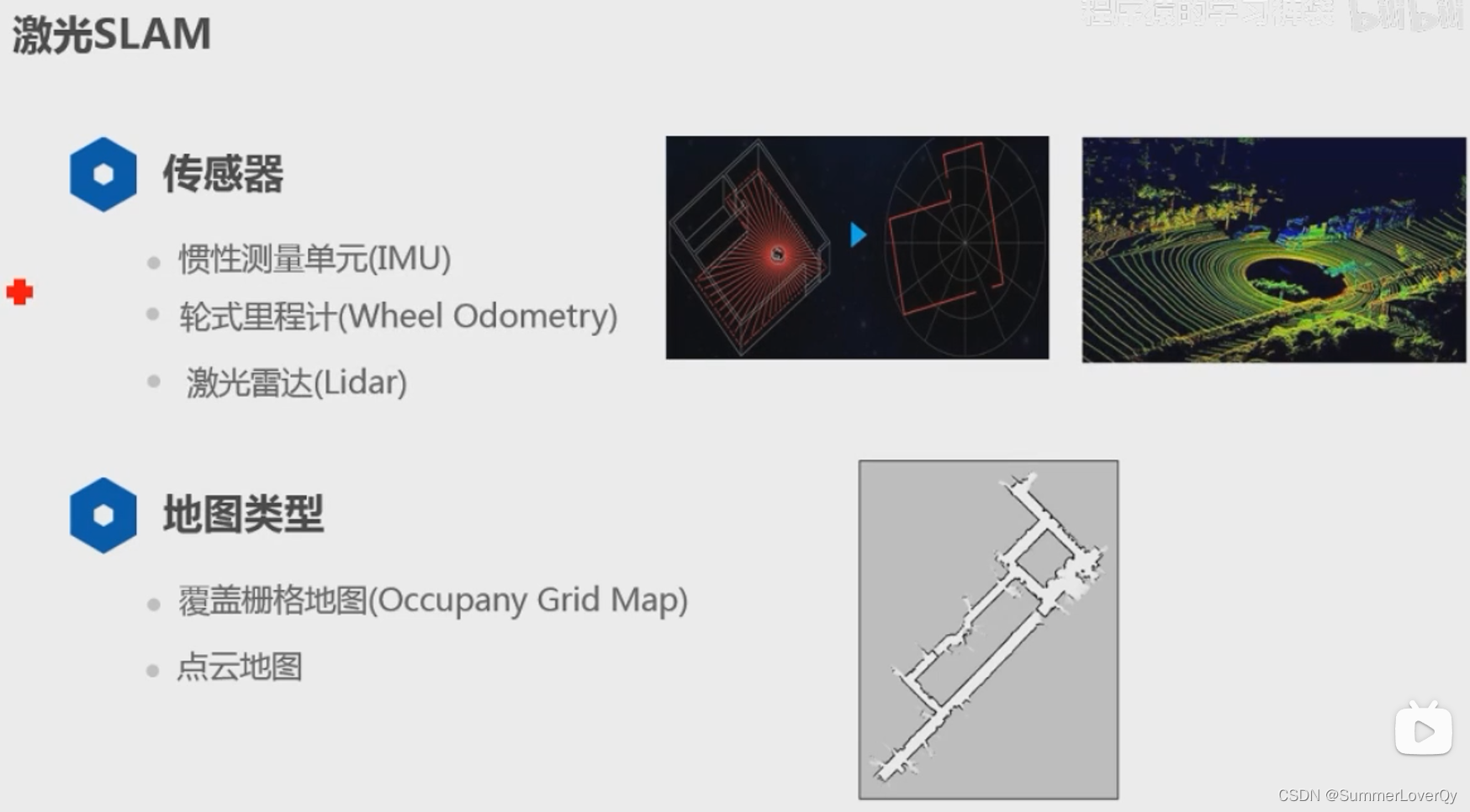
激光雷达:室内2D雷达,室外3D雷达
-
惯性测量单元:一般用于算角度
-
轮式里程计:一般用于算距离
-
覆盖栅格地图:使用更多,对地图区分性更强
激光SLAM的常用算法
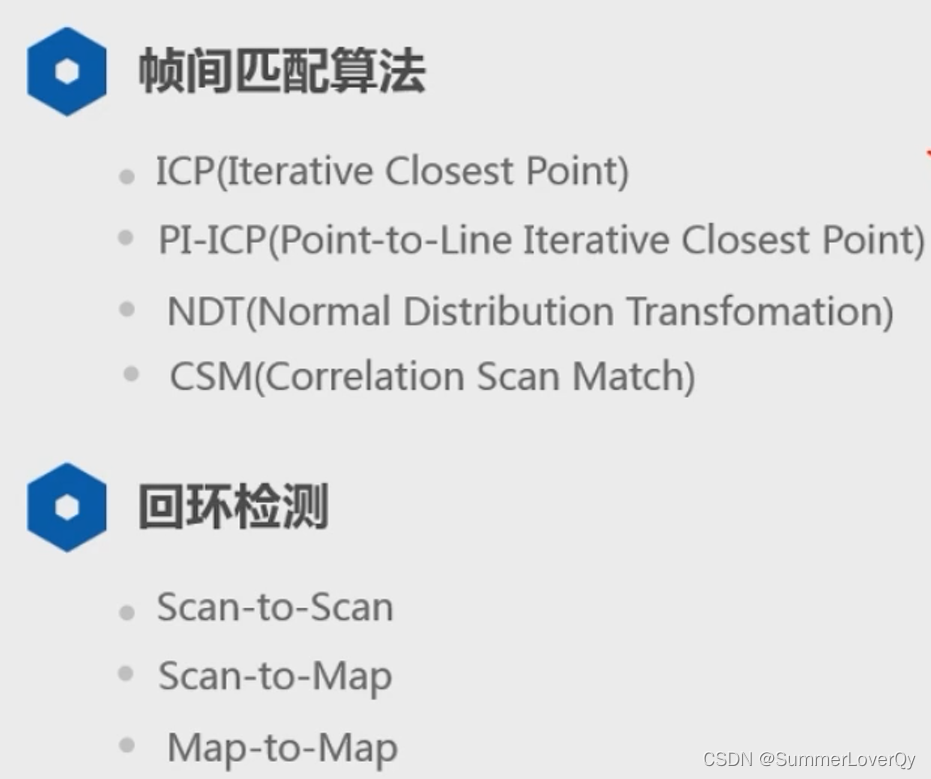
- Scan-to-Scan:基本淘汰
- Scan-to-Map:典型代表Cartographer,当前扫描与过去地图匹配
- Map-to-Map:很少开源,效果理论比较好
五.2D激光SLAM介绍
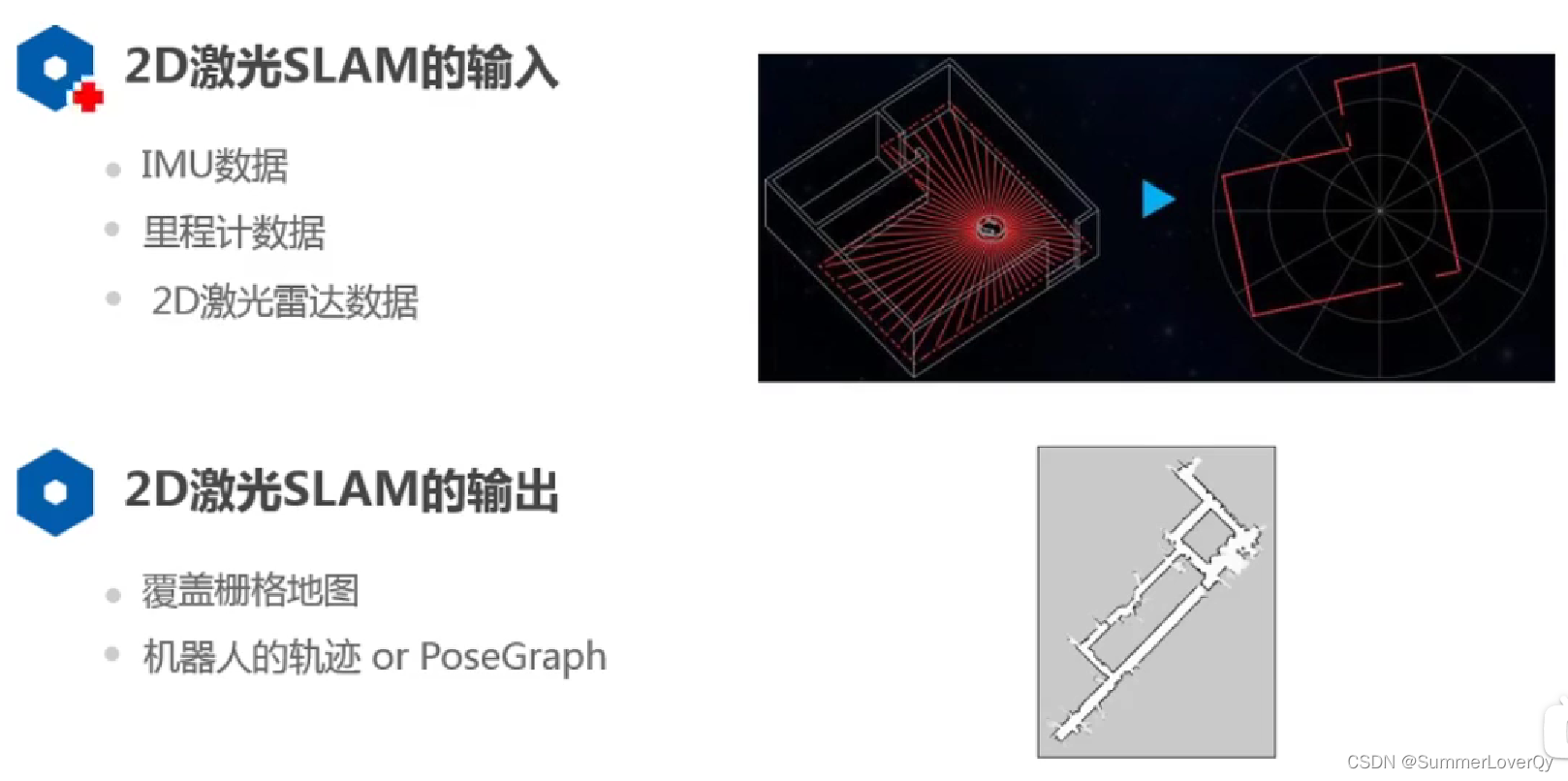
室内环境使用广泛
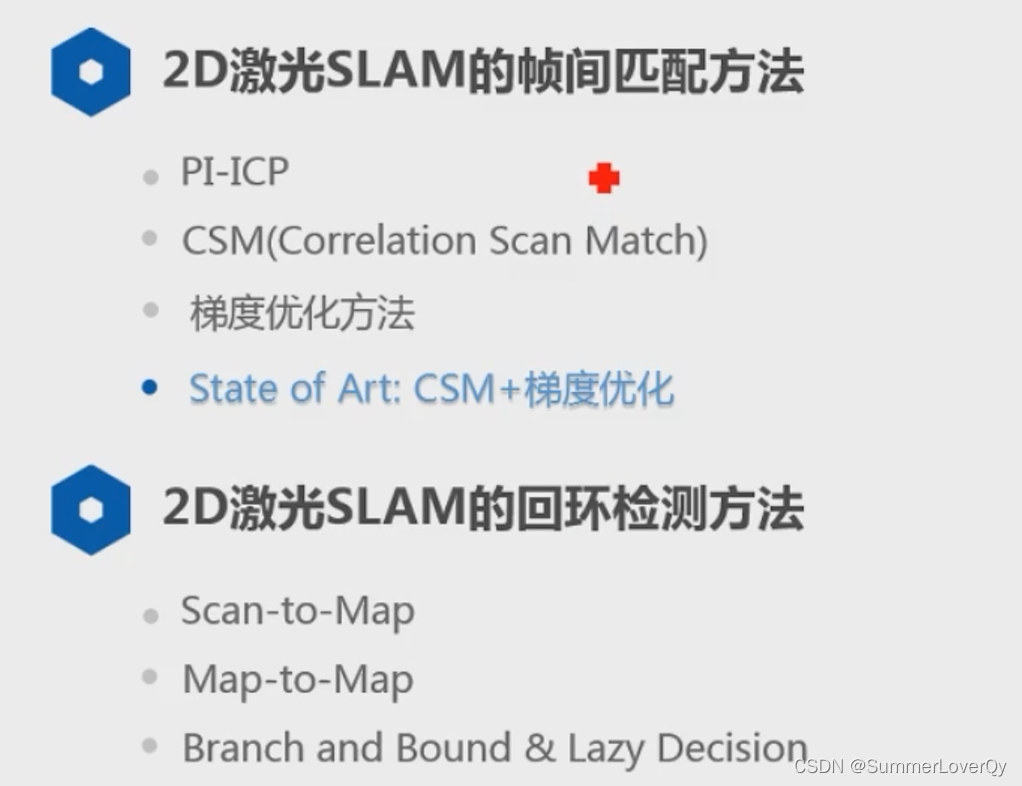
- State of Art:CSM+梯度算法,典型代表Cartographer
- Branch and Bound&Lazy Decision:分支递界
2D激光SLAM的发展
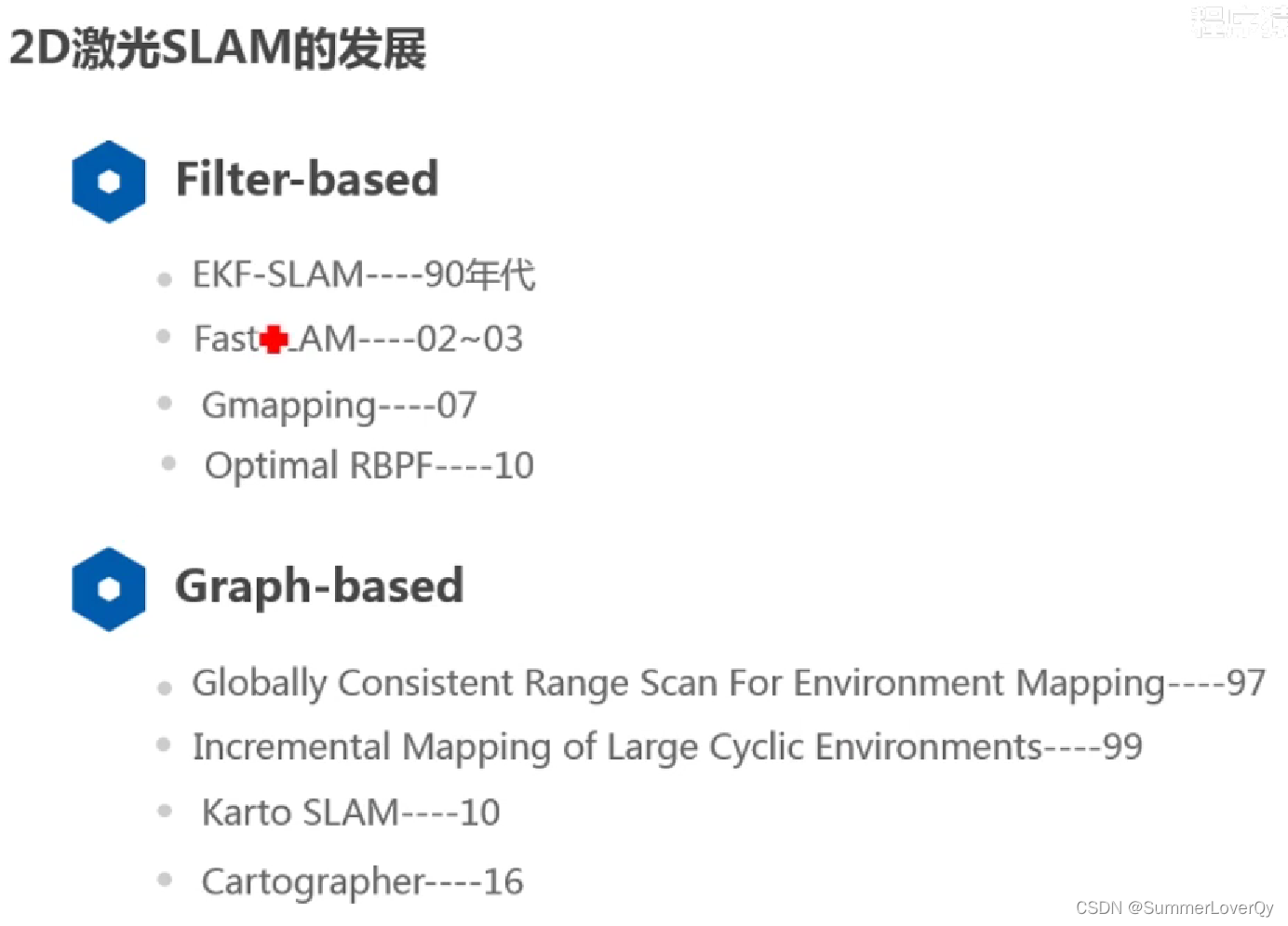
基于滤波基本被淘汰,重点应该放在基于图上面
2D激光SLAM的应用
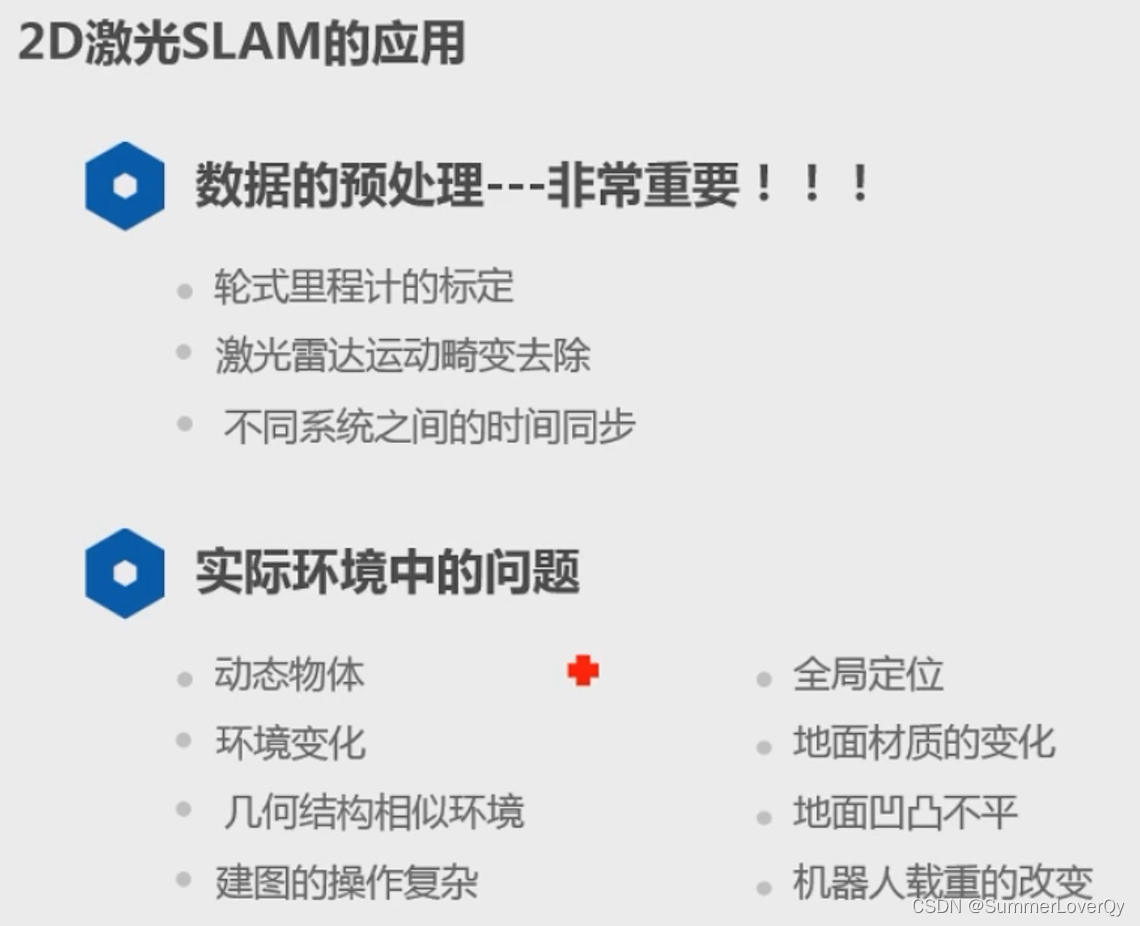
- 轮式里程计的标定:Offline,Online,Online实时调整
- 时间同步问题:ms级误差,MCU和PC之间会有时间差,对距离影响可能小,但是对于角度影响会比较大
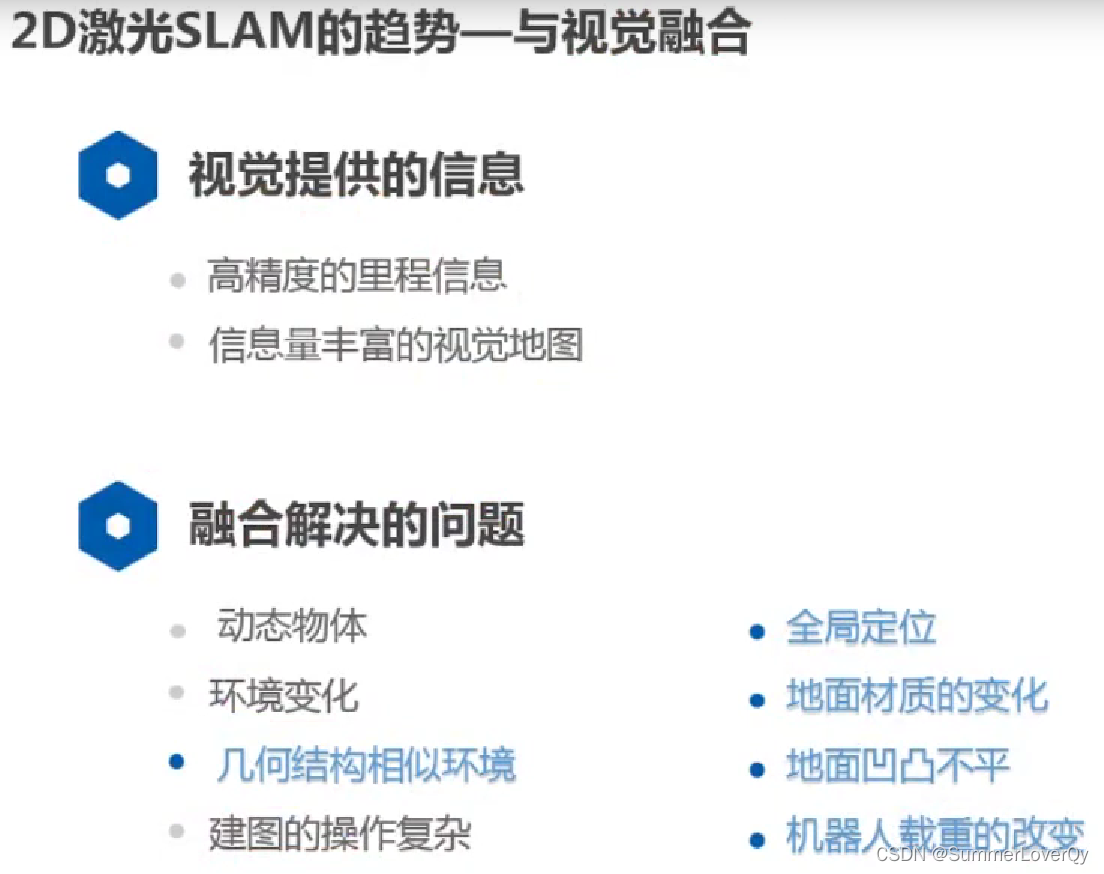
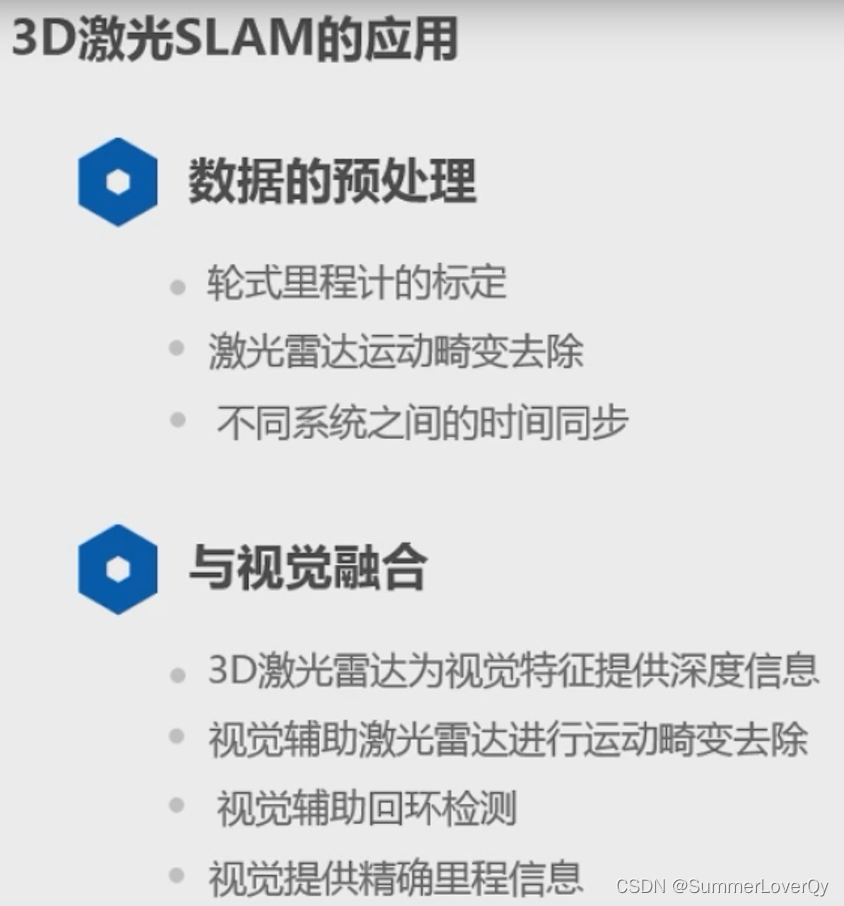
2D激光SLAM的趋势——与视觉融合
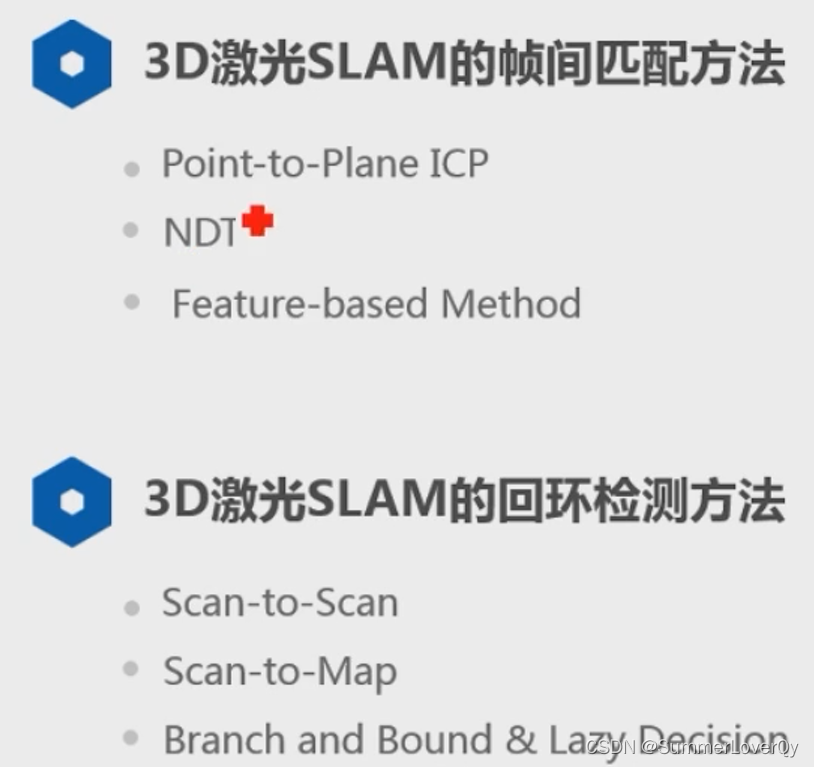
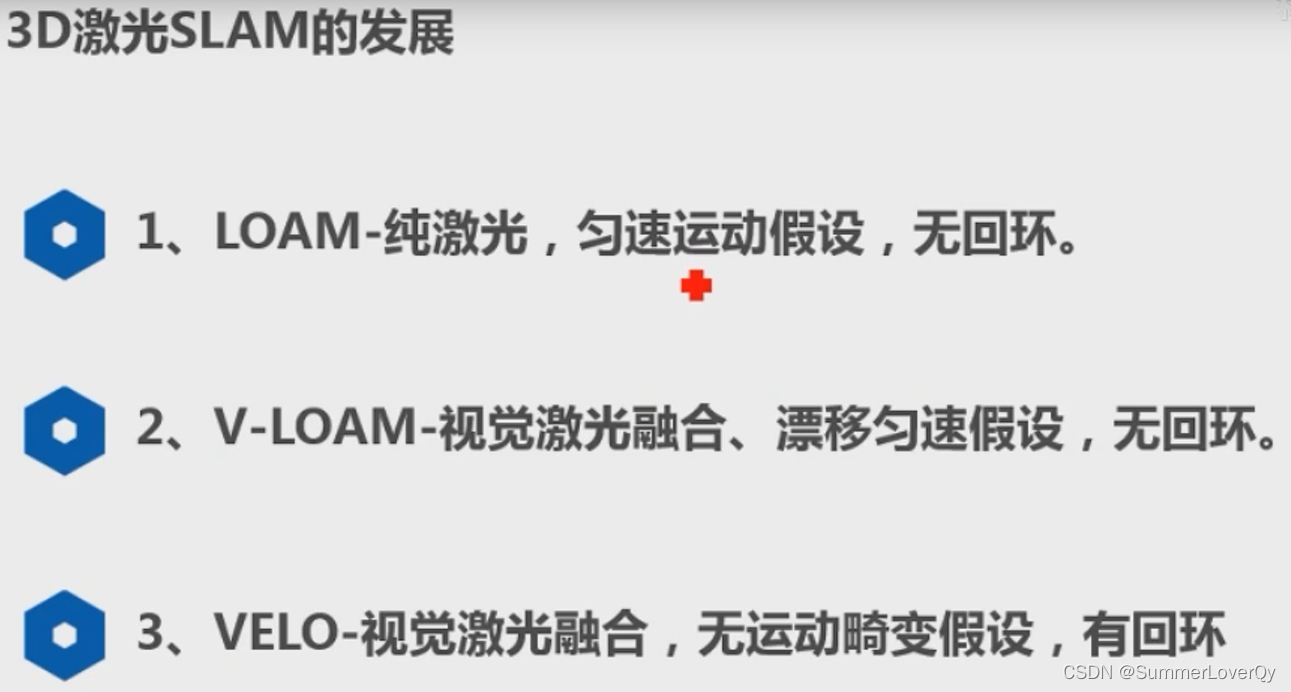
六.3D激光SLAM的介绍
开发成本较高,仅作了解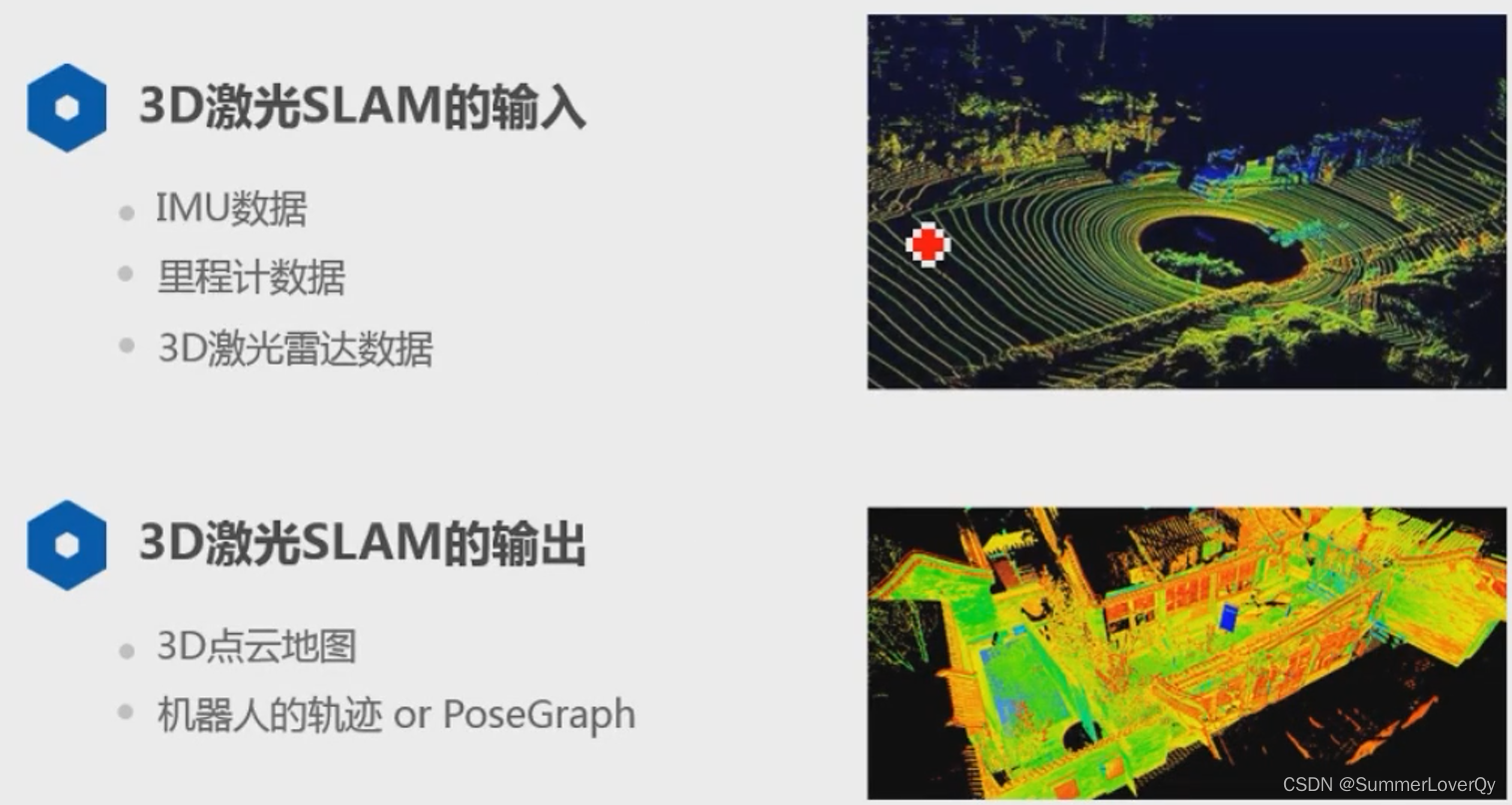
七.激光SLAM中的问题

















 1063
1063

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









