







 本文详细介绍车载ADAS系统的盲点监测(BSD)和车辆靠近(CVW)警报功能,涉及报警区域定义、功能场景、触发条件、软件设计思路,以及与车速、档位和曲率相关的计算方法。
本文详细介绍车载ADAS系统的盲点监测(BSD)和车辆靠近(CVW)警报功能,涉及报警区域定义、功能场景、触发条件、软件设计思路,以及与车速、档位和曲率相关的计算方法。
之前文章有写 汽车电子 – 车载ADAS常用中英文对照
里面有包含 车载ADAS的简单介绍。
这篇文章就详细一些介绍各个常用的车载ADAS。
相关法规文件:
一、盲点监测 BSD (Blind spot detection)
参看:功能定义-变道碰撞预警
BSD 系统(侧向盲区雷达监测系统)监测自车相邻区域,当其他车辆行驶在自车盲区时警告驾驶员。根据驾驶员的转向并线意图,进行不同级别的警告。
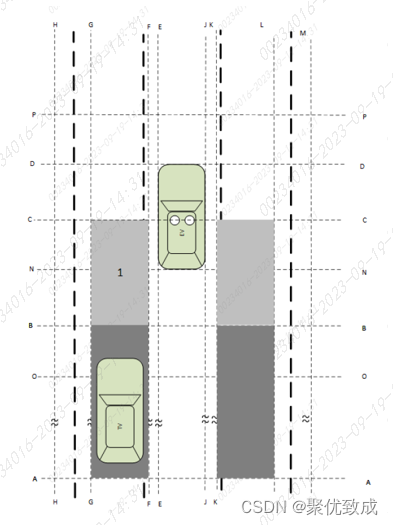
1、报警区域:
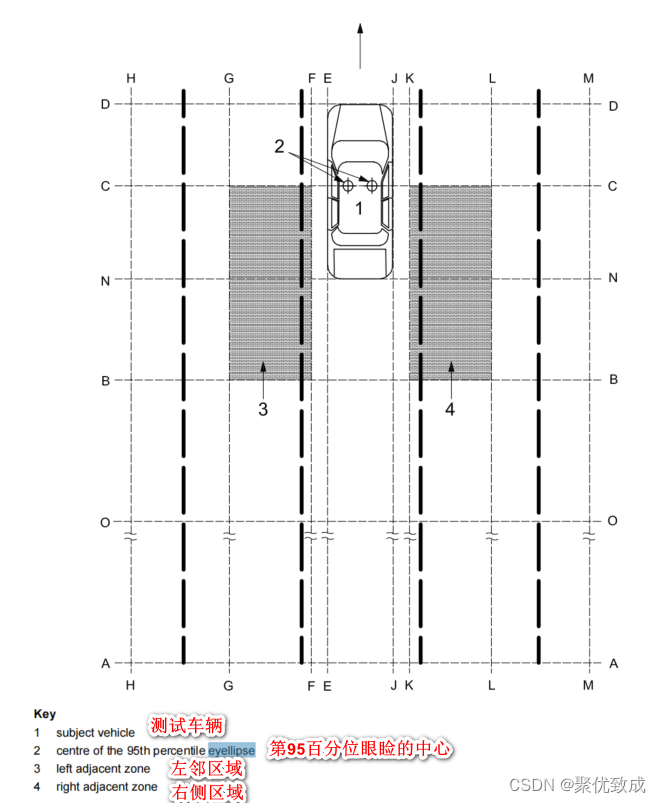
报警区域包括自车两侧的相邻区域通过线条 F,G,C 和 B (左侧)以及K,L,C 和 B(右侧)进行定义。旨在覆盖相邻车道,但是与任何车道标示线无关。
- A线应平行于测试车辆的后缘,并在其后方30.0米处。
- B线应平行于测试车辆的后缘,并在其后方3.0米处。
- C线应平行于测试车辆的前缘,并位于第95百分位眼睑的中心。
- D线应为测试车辆前缘两个方向的延伸线。
- E线应平行于测试车辆的中心线,并位于测试车辆车身的最左外边缘,不包括外后视镜。
- F线应平行于测试车辆的中心线,并与测试车辆车身最左外边缘左侧0.5米的距离。
- G线应平行于测试车辆的中心线,并与测试车辆车身最左外边缘左侧3.0米的距离。
- H线应平行于测试车辆的中心线,并与测试车辆车身最左外边缘左侧6.0米的距离。
- J线应平行于测试车辆的中心线,并位于测试车辆车身的最外右边缘,不包括外后视镜。
- K线应平行于测试车辆的中心线,并与测试车辆车身右最外边缘右侧0.5米的距离。
- L线应平行于测试车辆的中心线,并与测试车辆车身右最外边缘右侧的距离为3.0米。
- M线应平行于测试车辆的中心线,并与测试车辆车身右最外边缘右侧的距离为6.0米。
- N线应为测试车辆后缘两个方向的延伸线。
- O线应平行于目标车辆的后缘,距离为10.0米。
以上就可以划定左侧报警区域为:
横向:0.5m ~ 3m
纵向:-3m ~ +X(后保险杠处为坐标原点;X取决于第95百分位眼睑的中心)
2、功能场景:
目标车辆进入盲区监测报警区域
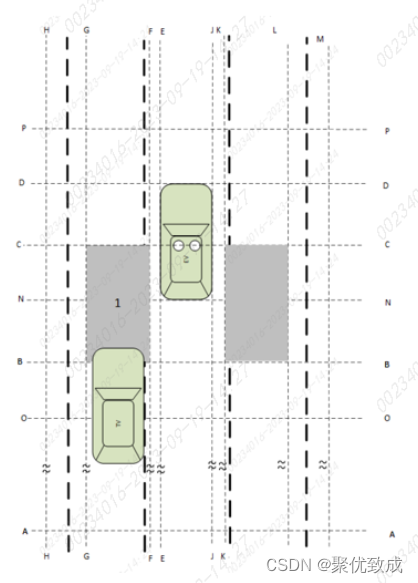
场景描述:当盲区监测报警区域内出现其它目标时,应发出报警。
3、功能需求
盲区监测功能:
1、车速范围:10km/h-150km/h,
2、档位:D档(前进挡)
3、弯道半径:125m 以上
4、报警触发:如果目标车辆满足一下所有条件,则应向驾驶员发出左侧盲点警告(右侧同理):
- 目标车辆的任何部分位于B线前方;
- 目标车辆完全在C线后面;
- 目标车辆完全位于F线左侧;
- 目标车辆的任何部分都在G线的右侧;
5、盲区警告抑制【可选】:如果自车正在超越目标车辆,且目标车辆已从前方进入相邻区域,则在首次要求盲区警告后,盲区警告可被抑制不超过2s。
6、报警触发时,监测驾驶员变道意图,若没有发起变道,则触发一级报警;若检测到驾驶员意图变道(开启转向灯)至报警触发侧,则触发二级报警。
知识点:
[高等数学]–曲率,曲率半径
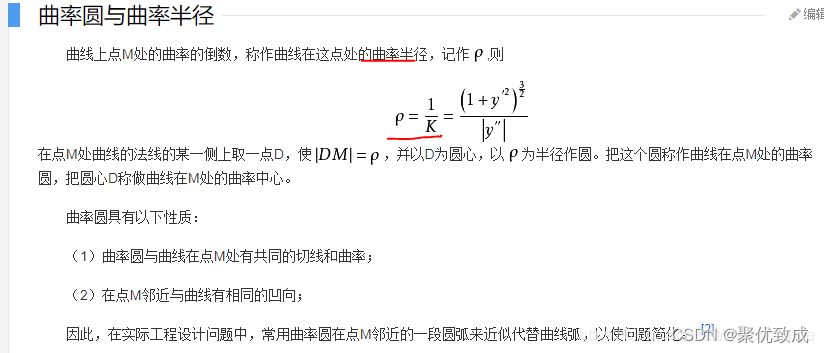
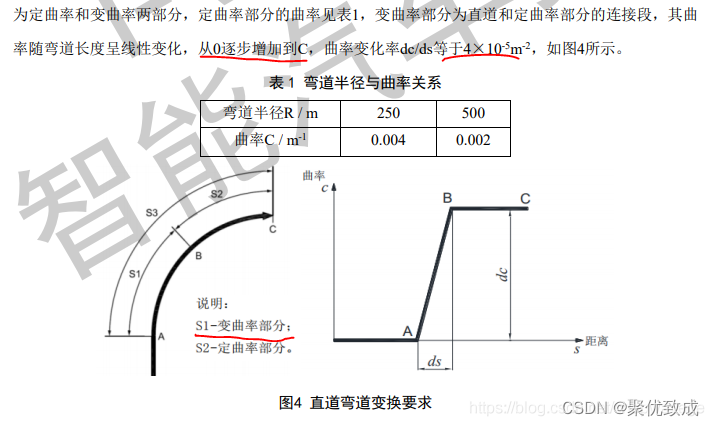
道路上弯道的曲率信息:
- 曲率半径 R 单位: m
- 曲率K 单位= 1/R 1/m
- 变化率 K’ = 1m/ arclenght , 1/m^2
车辆轮速与yawrate的关系:
车辆的yawrate可以通过车辆的轮速信息来计算。在理想情况下,车辆的yawrate等于车辆质心处的线速度与车辆轨迹曲率的乘积。具体而言,车辆的yawrate可以表示为以下公式:
yawrate = v / R
其中,v表示车辆质心处的线速度,R表示车辆在转弯时的转弯半径。
换一种公式,也就是说:
曲率 K = (1 / R) = (yawrate / 速度);
二、车辆靠近报警 CVW( Closing vehicle warning )
其功能表现为当后方存在快速接近车辆时,提醒驾驶员
1、报警区域:

报警区域包括自车两侧的相邻区域通过线条 F,G,B 和 A (左侧)以及K,L,B 和 A(右侧)进行定义。旨在覆盖相邻车道,但是与任何车道标示线无关。
- A线应平行于测试车辆的后缘,并在其后方30.0米处。
- B线应平行于测试车辆的后缘,并在其后方3.0米处。
- C线应平行于测试车辆的前缘,并位于第95百分位眼睑的中心。
- D线应为测试车辆前缘两个方向的延伸线。
- E线应平行于测试车辆的中心线,并位于测试车辆车身的最左外边缘,不包括外后视镜。
- F线应平行于测试车辆的中心线,并与测试车辆车身最左外边缘左侧0.5米的距离。
- G线应平行于测试车辆的中心线,并与测试车辆车身最左外边缘左侧3.0米的距离。
- H线应平行于测试车辆的中心线,并与测试车辆车身最左外边缘左侧6.0米的距离。
- J线应平行于测试车辆的中心线,并位于测试车辆车身的最外右边缘,不包括外后视镜。
- K线应平行于测试车辆的中心线,并与测试车辆车身右最外边缘右侧0.5米的距离。
- L线应平行于测试车辆的中心线,并与测试车辆车身右最外边缘右侧的距离为3.0米。
- M线应平行于测试车辆的中心线,并与测试车辆车身右最外边缘右侧的距离为6.0米。
- N线应为测试车辆后缘两个方向的延伸线。
- O线应平行于目标车辆的后缘,距离为10.0米。
以上就可以划定左侧报警区域为:
横向:0.5m ~ 3m
纵向:-30m ~ -3
2、功能场景:
目标车辆进入接近车辆报警区域
场景描述:当接近车辆报警区域内出现其它目标且与自车碰撞时间小于阈值时,应发出报警。
3、功能需求
接近车辆警告功能
1、车速范围:10km/h-150km/h,
2、档位:D档(前进挡)
3、弯道半径:125m 以上
4、报警触发:如果目标车辆满足以下所有条件,则应向驾驶员发出左侧接近车辆警告(右侧同理):
- 目标车辆完全落后于B线;
- 目标车辆完全位于F线左侧;
- 目标车辆的任何部分位于G线右侧;
- 目标车辆的估计碰撞时间(TTC)≤3.5s
备注:最大检测距离为70m,TTC=3.5s,该功能支持后方车辆接近的最大速度为20m/s;若后方车辆过快,系统可能无法及时报警。
5、接近车辆信息【可选】:与一辆或多辆目标车辆相关的视觉信息(如目标车辆位置、接近速度等)可随时提供给驾驶员,前提是该信息与警告指示有明显区别。
6、报警触发时,监测驾驶员变道(开启转向灯)意图,若没有发起变道,则触发一级报警;若检测到驾驶员意图变道(开启转向灯)至报警触发侧,则触发二级报警。
知识点:
TTC全称为Time to Collision,即碰撞时间。
TTC计算公式的公式如下: TTC = D / (Vr - Vs)
其中,TTC表示碰撞时间,D表示交通工具之间的距离,Vr表示接近的交通工具的速度,Vs表示被接近的交通工具的速度。
相对速度=目标车速-自车速
三、软件设计思路
1、判断车速和档位是否满足条件(采用滞回),将系统设为off状态,待机状态,和工作状态。
2、分别判断左右侧报警区域:
- 判断是否在横向报警范围内(采用滞回),并返回报警状态。
- 再判断是否在纵向报警范围内(采用滞回), 并返回报警状态。
- 两者同时满足则触发报警。
- 报警状态持续5s。
- 最后判断是否开启转向,从而决定报警等级。
3、选择左侧和右侧报警等级最高等级进行上报。



















 1275
1275

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











