







 本文介绍了结构光相移法的基础原理,包括相移法和双频外差原理,强调了多频率外差在解决相位展开问题中的优势。通过代码实践展示了如何从包裹相位图恢复绝对相位,讨论了精度和误差来源,并预告了下期内容将涉及实际投影拍摄的光栅图片还原绝对相位。
本文介绍了结构光相移法的基础原理,包括相移法和双频外差原理,强调了多频率外差在解决相位展开问题中的优势。通过代码实践展示了如何从包裹相位图恢复绝对相位,讨论了精度和误差来源,并预告了下期内容将涉及实际投影拍摄的光栅图片还原绝对相位。
点击上方“计算机视觉工坊”,选择“星标”
干货第一时间送达

01 相移法原理
02 双频外差原理
03 多频率外差原理
04 代码实践
01 相移法原理
结构光法原理其实是跟双目视觉一样的,都是要确定对应“匹配点”,利用“视差”三角关系计算距离,所不同的是:
双目视觉通过“被动”匹配唯一特征点
相移法作为结构光法中的一种,通过主动投影多副相移图案来标记唯一位置。
说明:虽然大多数结构光系统是单目的,但我们可以将其“双目”的,因为投影仪可以看做是一个“逆向”的相机,明白了这点,对于结构光系统一些公式推导就容易很多。
对于“双目”系统来说,最重要的工作是通过唯一标记来标记某一点,假设我们只投射一个周期的数据,我们从投影仪投出去的光栅公式如下:

其中:

比如说四步相移公式:
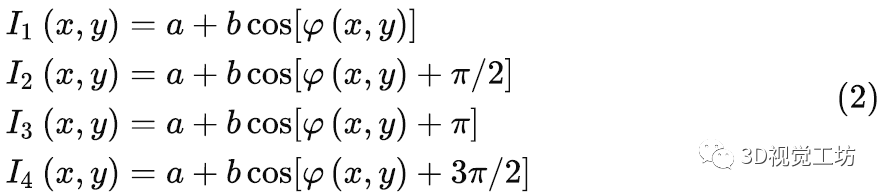
我们主要关心的是求解出相位主值,因为它对每个像素点是唯一的,假设我们从相机中获取了这四副图像,那怎么反过来求解相位主值?
需要说明的是,虽然这个公式对整副相移图像的,但是这公式对每个像素都是独立的,所以即使我们拿从相机拍摄到经过调制变形的图像来求解,依然可以得到单个像素点唯一的相位主值。
联立4个方程,得到:

无论:
哪台相机
拍摄到什么图像
我们要得到某个像素点的唯一“标记”,也就是这个相位主值,代回这个公式即可,都可以得到唯一值。得到了唯一值,建立匹配关系,就可以利用三角公式进行重建。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 591
591

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









