






点击上方“计算机视觉工坊”,选择“星标”
干货第一时间送达

作者丨陈TEL
来源丨GiantPandaCV
编辑丨极市平台
导读
本文作者主要借鉴repvgg重参化的思想,将原有的3×3conv替换成Repvgg Block,为原有的YOLO模型涨点。
前言: 之前做了一次shufflenetv2与yolov5的组合,目的是为了适配arm系列芯片,让yolov5在端侧设备上也能达到实时。但在gpu或者npu方面也一直在尝试着实验,对此类实验的目的很明确,要求也不高,主要还是希望yolov5在保持原有精度的同时能够提速。这一次的实验主要借鉴repvgg重参化的思想,将原有的3×3conv替换成Repvgg Block,为原有的YOLO模型涨点。
实验
这一次的模型主要还是借鉴repvgg重参化的思想,将原有的3×3conv替换成repvgg block,在训练过程中,使用的是一个多分支模型,而在部署和推理的时候,用的是多分支转化为单路的模型。
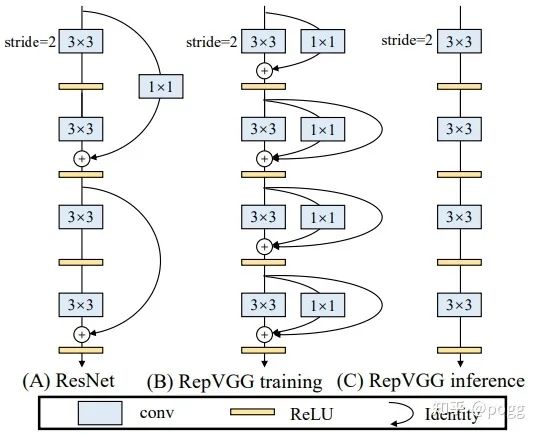
图摘自https://arxiv.org/pdf/2101.03697.pdf
类比repvgg在论文中阐述的观点,这里的baseline选定的是yolov5s,对yolov5s的3×3conv进行重构,分出一条1×1conv的旁支。
在推理时,将旁支融合到3×3的卷积中,此时的模型和原先的yolov5s模型无二致
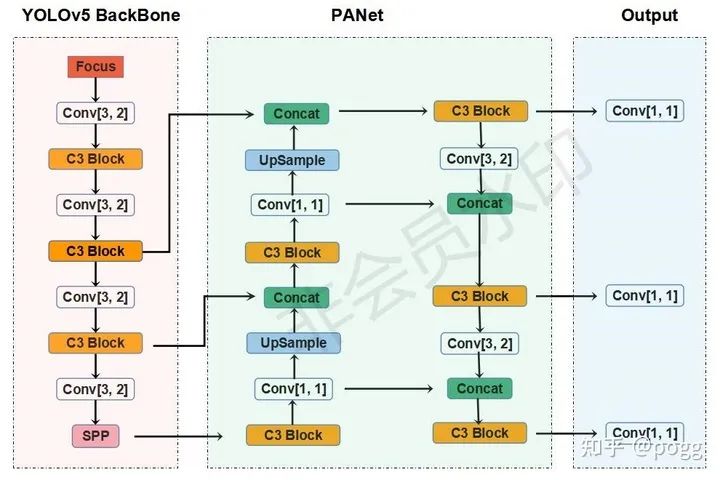
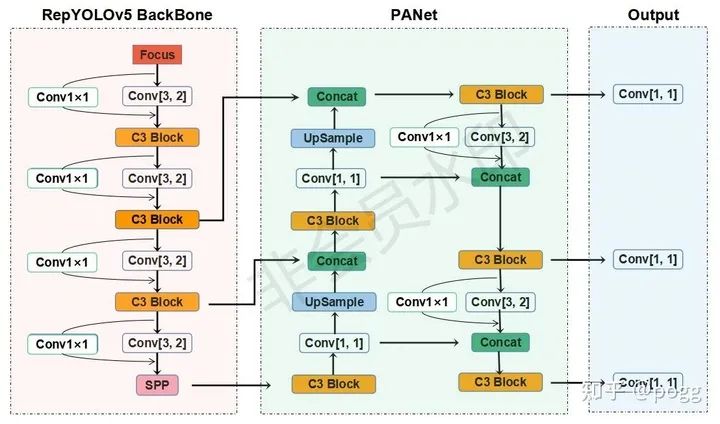
在次之前,采用的是最直接的方式对yolov5s进行魔改,也就是直接替换backbone的方式,但发现参数量和FLOPs较高,复现精度最接近yolov5s的是repvgg-A1,如下backbone替换为A1的yolov5s:
而后,为了抑制Flops和参数的增加,采取使用repvgg block替换yolov5s的3×3conv的方式。
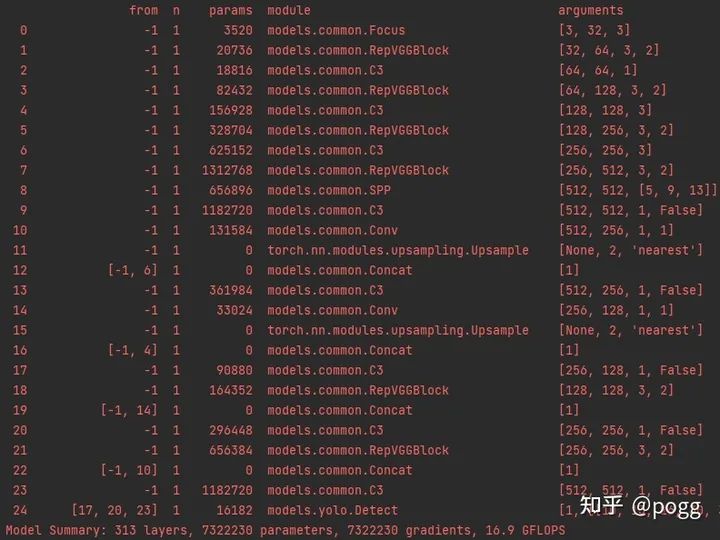
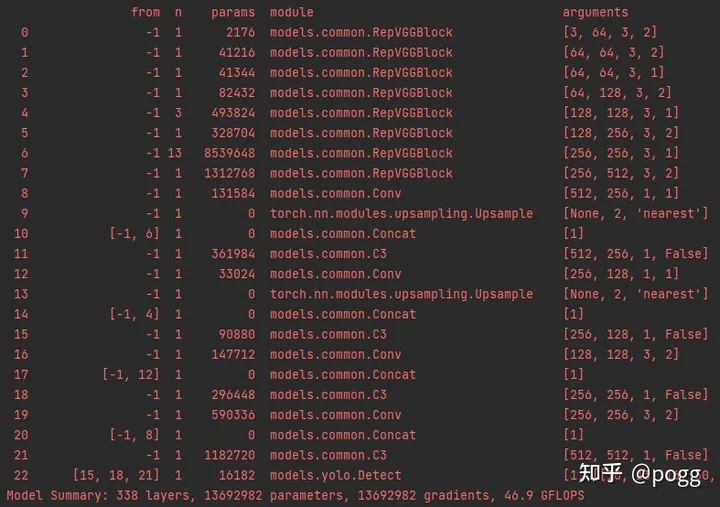
两者之间相差的Flops比和参数比约为2.75和1.85.
性能
通过消融实验,得出的yolov5s和融合repvgg block的yolov5s性能差异如下:
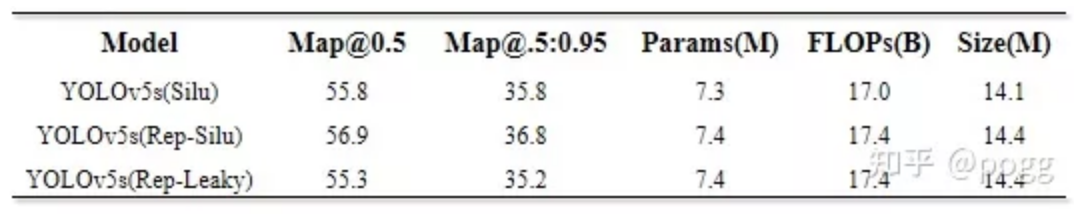
Rep指植入repvgg block模块,Silu和leaky指使用的激活函数
这里评估的yolov5s在map指标上和官网有所出入,测试两次后均为55.8和35.8,不过这个测试结果和GitHub - midasklr/yolov5prune (https://github.com/midasklr/yolov5prune)以及Issue #3168 · ultralytics/yolov5(https://github.com/ultralytics/yolov5/issues/3168)大致相同。使用repvgg block重构yolov5s的3×3卷积,在map@0.5和@.5:.95指标上均能至少提升一个点。
训练结束后的repyolov5s需要进行convert,将旁支的1×1conv进行融合,否则在推理时会比原yolov5s慢20%。
使用convert.py对repvgg block进行重参化,主要代码如下,参考https://github.com/DingXiaoH/RepVGG/blob/main/repvgg.py:
# --------------------------repvgg refuse---------------------------------
def reparam conv(self): # fuse model Conv2d() + BatchNorm2d() layers
"""
:param rbr_dense: 3×3卷积模块
:param rbr_1x1: 1×1旁支inception
:param _pad_1x1_to_3x3_tensor: 对1×1的inception进行扩充
:return:
"""
print('Reparam and Fusing Block... ')
for m in self.model.modules():
# print(m)
if type(m) is RepVGGBlock:
if hasattr(m, 'rbr_1x1'):
# print(m)
kernel, bias = m.get_equivalent_kernel_bias()
conv_reparam = nn.Conv2d(in_channels=m.rbr_dense.conv.in_channels,
out_channels=m.rbr_dense.conv.out_channels,
kernel_size=m.rbr_dense.conv.kernel_size,
stride=m.rbr_dense.conv.stride,
padding=m.rbr_dense.conv.padding, dilation=m.rbr_dense.conv.dilation,
groups=m.rbr_dense.conv.groups, bias=True)
conv_reparam.weight.data = kernel
conv_reparam.bias.data = bias
for para in self.parameters():
para.detach_()
m.rbr_dense = conv_reparam
# m.__delattr__('rbr_dense')
m.__delattr__('rbr_1x1')
m.deploy = True
m.forward = m.fusevggforward # update forward
continue
# print(m)
if type(m) is Conv and hasattr(m, 'bn'):
# print(m)
m.conv = fuse_conv_and_bn(m.conv, m.bn) # update conv
delattr(m, 'bn') # remove batchnorm
m.forward = m.fuseforward # update forward
self.info()
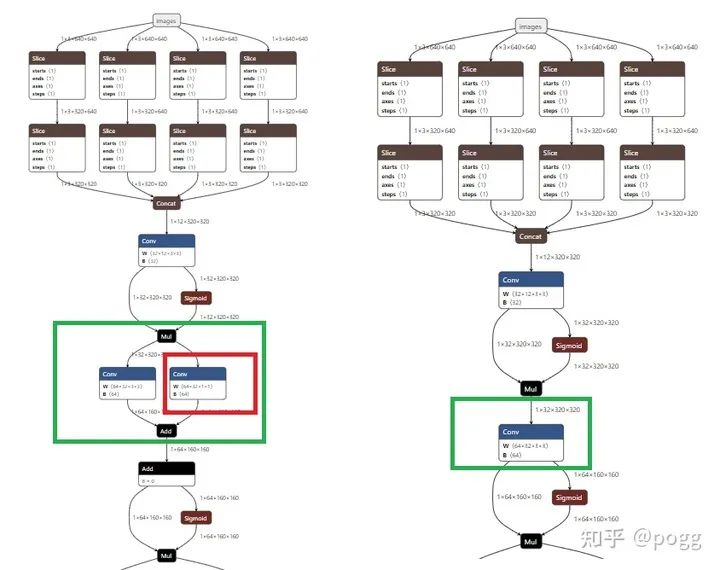
return self我们可以通过调用onnx模型对convert前后的模型进行可视化:
推理
map指标只是参考的一部分,还有一部分是关于reparam和fuse后的yolov5s会不会因为repvgg block的植入而变慢。在理论上,reparam后的repvgg block等价于3×3卷积,不过该卷积因为融合比普通3×3卷积更加紧凑。
在测试三次coco val2017数据集后(5000张并进行单张推理),得出repyolov5s的单张推测时间为14/14/14(ms)、yolov5s为16/16/16(ms),这里和白神讨论了一下,白神认为两者极度接近的推理时间可能存在着测试误差,无任何说服性。
不过可以肯定的是convert后的yolov5s推理速度不会因为repvgg block植入而变慢。为了避免偶然性和测算误差,这里使用了500/5000/64115/118287张图片进行了推理测试:

左为植入repvgg block的yolov5s,右为原yolov5s
测试后的结果如下:
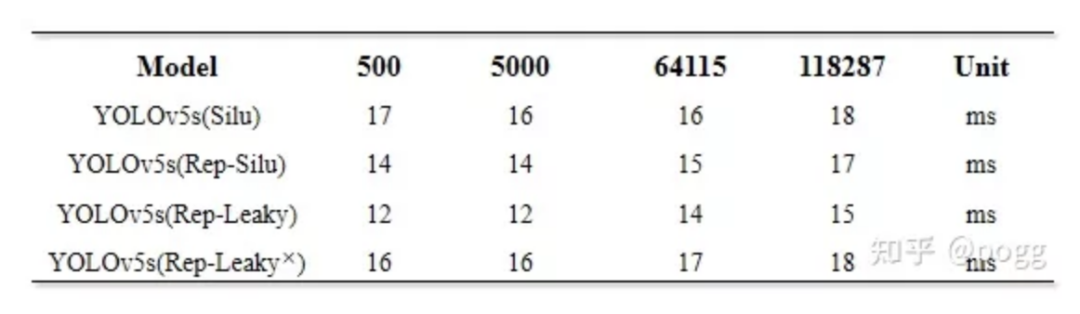
Rep表示融合的repvgg block,silu和leaky指激活函数,最后一行是不做融合的repyolov5s
测试
检测效果应该也是大家关心的一个指标,使用以上两个模型,保证其他参数均一致,对图片进行检测,效果如下:

融合repvgg的yolov5s

原yolov5s
总结
使用repvgg block对yolov5s进行改进,通过消融实验,总结出以下几点:
融合repvgg block的yolov5s在大小尺度目标上均能涨点;
使用融合repvgg block和leakyrelu的yolov5s比原yolov5s在map上降低了0.5个百分点,但是速度可以提升15%(主要是替换了Silu函数起的作用);
如果不做convert,个人感觉这个融合实验毫无意义,旁生的支路会严重影响模型的运行速度;
C3 Block和Repvgg Block在cpu上使用性价比低,在gpu和npu上使用才能带来最大增益
使用重参化的yolov5是有代价的,代价主要损耗均在训练方面,会多占用显卡大约5-10%的显存,训练时间也会增多
可以考虑使用repvgg block对yolov3-spp和yolov4的3×3卷积进行重构
代码和预训练模型后续会放到本人仓库上:
参考:
【1】https://zhuanlan.zhihu.com/p/344324470
【2】https://github.com/ultralytics/yolov5/discussions/3181
【3】Use activation function · Issue #584 · ultralytics/yolov5
【4】https://github.com/ppogg/YOLOv5-Lite
本文仅做学术分享,如有侵权,请联系删文。
下载1
在「计算机视觉工坊」公众号后台回复:深度学习,即可下载深度学习算法、3D深度学习、深度学习框架、目标检测、GAN等相关内容近30本pdf书籍。
下载2
在「计算机视觉工坊」公众号后台回复:计算机视觉,即可下载计算机视觉相关17本pdf书籍,包含计算机视觉算法、Python视觉实战、Opencv3.0学习等。
下载3
在「计算机视觉工坊」公众号后台回复:SLAM,即可下载独家SLAM相关视频课程,包含视觉SLAM、激光SLAM精品课程。
重磅!计算机视觉工坊-学习交流群已成立
扫码添加小助手微信,可申请加入3D视觉工坊-学术论文写作与投稿 微信交流群,旨在交流顶会、顶刊、SCI、EI等写作与投稿事宜。
同时也可申请加入我们的细分方向交流群,目前主要有ORB-SLAM系列源码学习、3D视觉、CV&深度学习、SLAM、三维重建、点云后处理、自动驾驶、CV入门、三维测量、VR/AR、3D人脸识别、医疗影像、缺陷检测、行人重识别、目标跟踪、视觉产品落地、视觉竞赛、车牌识别、硬件选型、深度估计、学术交流、求职交流等微信群,请扫描下面微信号加群,备注:”研究方向+学校/公司+昵称“,例如:”3D视觉 + 上海交大 + 静静“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进去相关微信群。原创投稿也请联系。

▲长按加微信群或投稿

▲长按关注公众号
3D视觉从入门到精通知识星球:针对3D视觉领域的视频课程(三维重建系列三维点云系列结构光系列、手眼标定、相机标定、orb-slam3知识点汇总、入门进阶学习路线、最新paper分享、疑问解答五个方面进行深耕,更有各类大厂的算法工程人员进行技术指导。与此同时,星球将联合知名企业发布3D视觉相关算法开发岗位以及项目对接信息,打造成集技术与就业为一体的铁杆粉丝聚集区,近2000星球成员为创造更好的AI世界共同进步,知识星球入口:
学习3D视觉核心技术,扫描查看介绍,3天内无条件退款
圈里有高质量教程资料、答疑解惑、助你高效解决问题
觉得有用,麻烦给个赞和在看~ 















 317
317











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









