







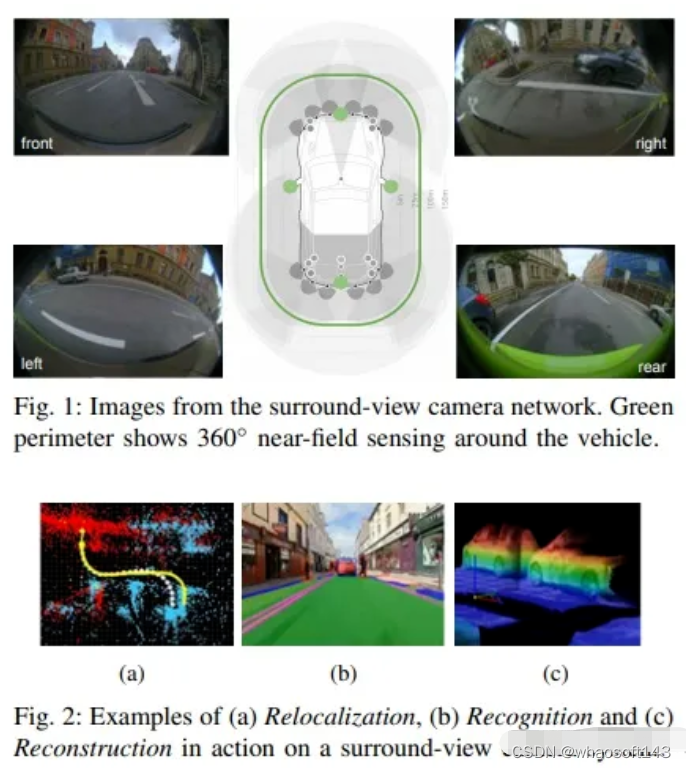
cameras是自动驾驶系统中的主要传感器,它们提供高信息密度,最适合检测为人类视觉而设置的道路基础设施。全景相机系统通常包括四个鱼眼摄像头,190°+视野覆盖车辆周围的整个360°,聚焦于近场感知。它们是低速、高精度和近距离传感应用的主要传感器,如自动泊车、交通堵塞辅助和低速紧急制动。在这项工作中,论文对此类视觉系统进行了详细的调查,并在可分解为四个模块组件(即识别、重建、重新定位和重组)的架构背景下进行了调查,共同称之为4R架构。论文讨论了每个组件如何完成一个特定方面,并提供了一个位置论证(即它们可以协同作用),形成一个完整的低速自动化感知系统。
本文的工作部分受到了Malik等人在[5]中的工作的启发。这项工作的作者提出,计算机视觉的核心问题是重建、识别和重组,他们称之为计算机视觉的3R。在此,论文建议将计算机视觉的3R扩展并专门化为自动驾驶计算机视觉的4R:重建、识别、重组和重新定位。
重建意味着从视频序列推断场景几何体,包括车辆在场景中的位置。这一点的重要性应该是显而易见的,因为它对于场景绘制、障碍物避免、机动和车辆控制等问题至关重要。Malik等人将此扩展到几何推断之外,以包括反射和照明等特性。然而,这些附加属性(至少目前)在自动驾驶计算机视觉环境中并不重要,因此论文将重建定义为更传统意义上的三维几何恢复。
识别是一个术语,用于将语义标签附加到视频图像或场景的各个方面,识别中包括层次结构。例如,自行车手有一个空间层次结构,因为它可以分为自行车和骑手的子集,而车辆类别可以有汽车、卡车、自行车等分类子类别。只要对自动驾驶系统有用,这种情况就可以继续下去。灯可以按类型(车灯、路灯、刹车灯等)、颜色(红、黄、绿)以及它们对自动驾驶车辆的重要性(需要响应,可以忽略)进行分类,从而完成系统的高级推理。
重新定位是指车辆相对于其周围环境的位置识别和度量定位。可以针对宿主车辆中预先记录的轨迹进行,例如,经过训练的停车场,也可以针对从基础设施传输的地图进行,例如HD Maps。它与SLAM中的环路闭合高度相关,尽管不只是考虑环路闭合问题,而是考虑根据一个或多个预定义地图定位车辆的更广泛问题。
重组是将计算机视觉前三个组成部分的信息组合成统一表示的方法。在本文中,使用这个术语来等同于“后期融合”,这是自动驾驶的重要步骤,因为车辆控制需要传感器输出的统一表示,这也允许在后期融合多个摄像头的输出。
近域感知系统介绍
自动停车系统
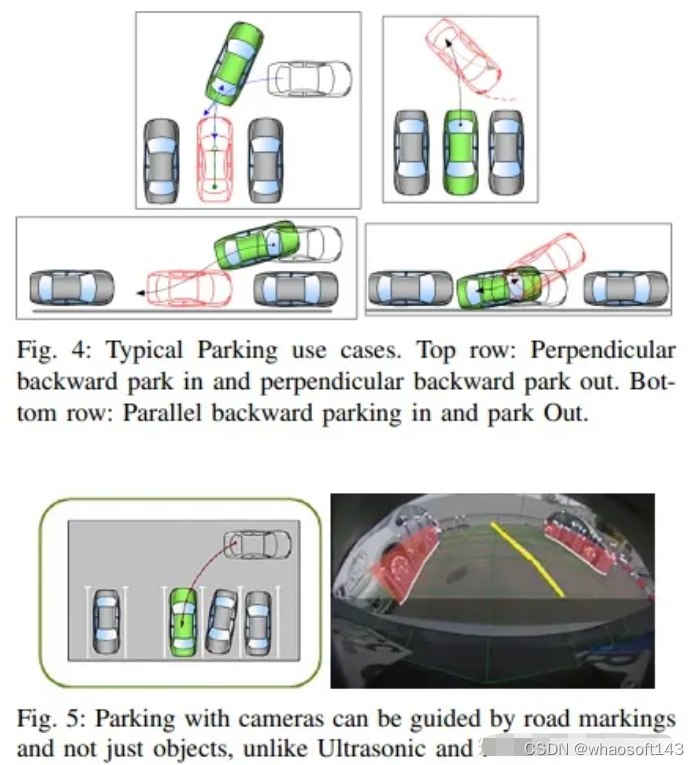
自动停车系统是短距离传感的主要用例之一,图4描述了一些典型的停车用例。早期商业半自动泊车系统采用超声波传感器或radar,然而,最近,全景摄像头正成为自动停车的主要传感器之一。超声波和毫米波雷达传感器用于自动停车的一个主要限制是,只能根据存在的其他障碍物来识别停车位(图5)。此外,环视相机系统允许在存在可视停车标记(如涂漆线标记)的情况下停车,同时也被视为实现代客泊车系统的关键技术。
交通拥堵辅助系统
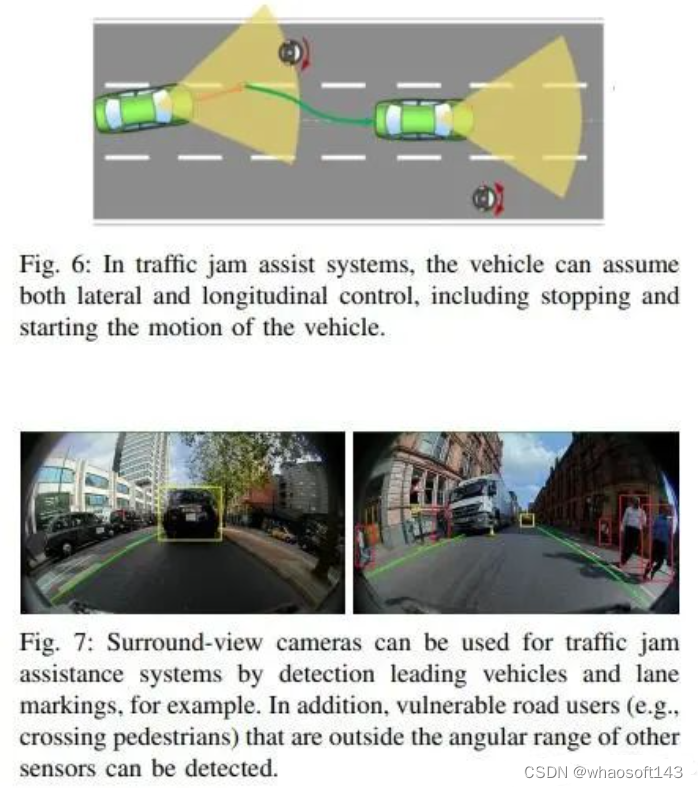
由于大部分事故都是低速追尾碰撞,交通拥堵情况被认为是短期内可以带来好处的驾驶领域之一,尽管目前的系统可能缺乏鲁棒性。在自动交通拥堵辅助系统中,车辆在交通拥堵情况下控制纵向和横向位置(图6)。此功能通常用于低速环境,最高速度为∼60kph,但建议更低的最高速度为40kph。虽然交通拥堵援助通常考虑高速公路场景,但已经对城市交通拥堵救援系统进行了调查。鉴于此应用的低速特性,全景摄像头是理想的传感器,尤其是在城市环境中,例如,行人可以尝试从传统前向摄像头或radar系统视野之外的区域穿过。图7显示了使用全景相机进行交通堵塞辅助的示例。除了检测其他道路使用者和标记外,深度估计和SLAM等特征对于推断到物体的距离和控制车辆位置也很重要。
低速制动
一项研究表明,自动后向制动显著降低了碰撞索赔率,配备后摄像头、驻车辅助和自动制动的车辆报告碰撞减少了78%。全景相机系统对于低速制动非常有用,因为深度估计和目标检测的组合是实现此功能的基础。
鱼眼相机
鱼眼相机为自动驾驶应用提供了明显的优势,由于视野极广,可以用最少的传感器观察车辆的整个周围。通常,360°范围只需要四个摄像头覆盖。然而,考虑到更为复杂的投影几何体,这一优势带来了成本。过去的几篇论文综述了如何建模鱼眼几何形状,例如[34]。论文不打算在此重复这一点,而是关注鱼眼相机技术的使用给自动驾驶视觉带来的问题。
在标准视场相机中,直线投影和透视的原理非常接近,具有常见的透视特性,即现实世界中的直线在图像平面上投影为直线。平行的直线组被投影为一组直线,这些直线在图像平面上的一个消失点上会聚。通过光学畸变的偏离很容易纠正。许多汽车数据集提供的图像数据消除了光学畸变,具有简单的校正方法,或几乎不可察觉的光学畸变。因此,大多数汽车视觉研究都隐含了直线投影的假设,鱼眼透视图与直线透视图有很大不同。相机场景中的一条直线被投影为鱼眼图像平面上的一条曲线,平行线集被投影为一组在两个消失点处会聚的曲线[38]。然而,失真并不是唯一的影响,图8显示了环视系统中安装在镜子上的典型摄像头的图像。在鱼眼相机中,物体图像中的方向取决于它们在图像中的位置。在本例中,左侧的车辆旋转了近90◦ 与右侧车辆相比,这对目标检测卷积方法中假定的平移不变性有影响。在标准相机中,平移不变性是可以接受的假设。然而,如图8所示,鱼眼图像并非如此,在任何计算机视觉算法设计中,必须仔细考虑如何处理这一点。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2166
2166

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









