







 本文是稳定状态模型系列博文,聚焦Volterra模型。介绍了该模型的形成,它是为解释一战期间地中海渔场鱼类比例变化而建,呈现了食饵与捕食者的制约关系。还包含模型分析及相关习题,如树木砍伐策略、种群依存模型等问题。
本文是稳定状态模型系列博文,聚焦Volterra模型。介绍了该模型的形成,它是为解释一战期间地中海渔场鱼类比例变化而建,呈现了食饵与捕食者的制约关系。还包含模型分析及相关习题,如树木砍伐策略、种群依存模型等问题。
稳定状态模型系列博文:
稳定状态模型 (一): 微分方程稳定性理论简介 :自治系统、动力系统、相平面、相图、轨线 、 奇点、孤立奇点;
稳定状态模型 (二):再生资源的管理和开发 :资源增长模型 、资源开发模型 、经济效益模型、 种群的相互竞争模型
目录
意大利生物学家 D'Ancona 曾致力于鱼类种群相互制约关系的研究,在研究过程中 他无意中发现了第一次世界大战期间地中海各港口捕获的几种鱼类占捕获总量百分比 的资料,从这些资料中他发现各种软骨掠肉鱼,如鲨鱼、鲢鱼等我们称之为捕食者的一 些不是很理想的鱼占总渔获量的百分比,在 1914~1923 年期间,意大利阜姆港收购的 捕食者所占的比例有明显的增加:
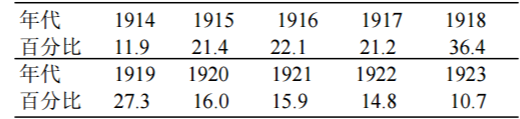
他知道,捕获的各种鱼的比例基本上代表了地中海渔场中各种鱼类的比例。战争中捕获 量大幅度下降,当然使渔场中食用鱼(食饵)增加,以此为生的鲨鱼也随之增加。但是 捕获量的下降为什么会使鲨鱼的比例增加,即对捕食者而不是对食饵有利呢?他无法解 释这个现象,于是求助于著名的意大利数学家 V. Volterra,希望建立一个食饵—捕食者 系统的数学模型,定量地回答这个问题。
1 形成模型
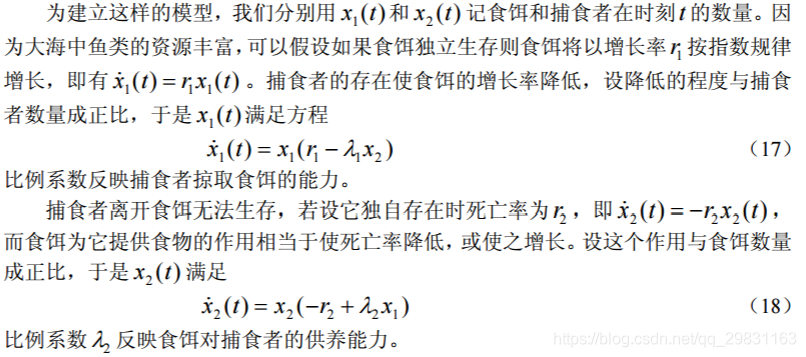
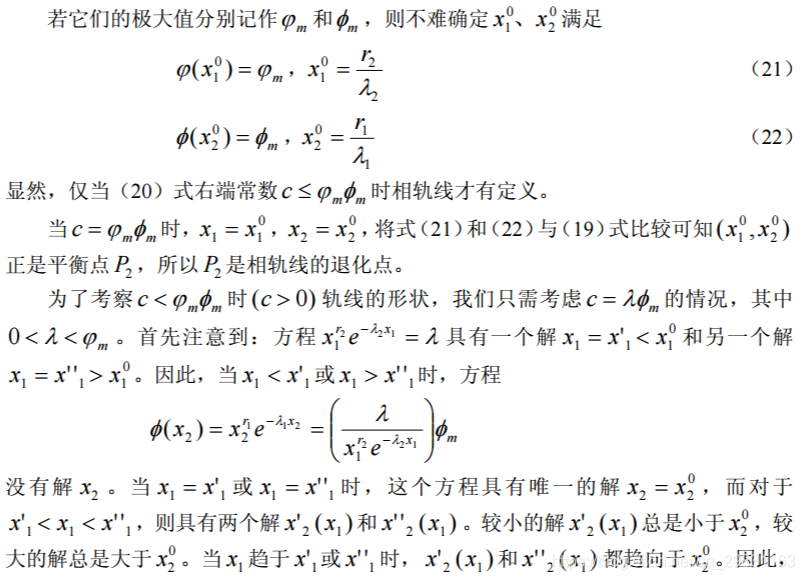
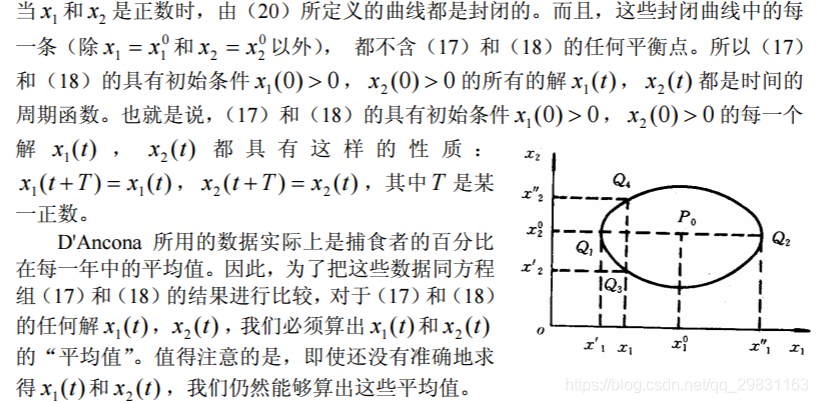
方程(17)和(18)是在没有人工捕获情况下自然环境中食饵与捕食者之间的制约 关系,是 Volterra 提出的最简单的模型。这个模型没有引入竞争项。
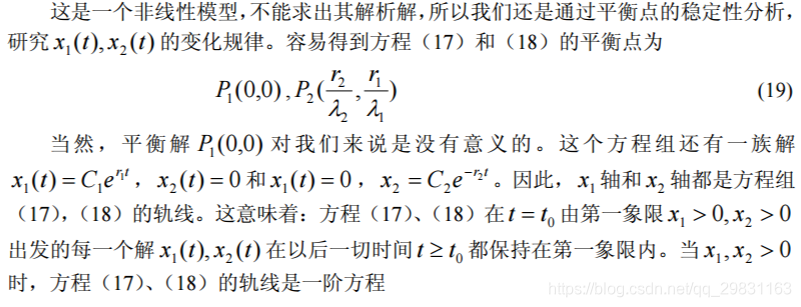
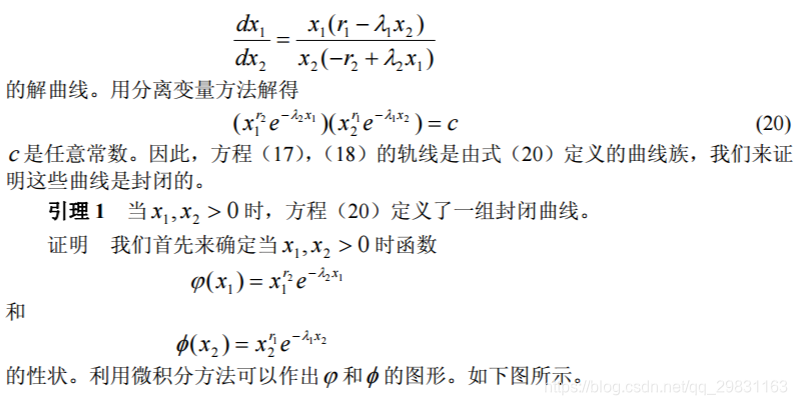
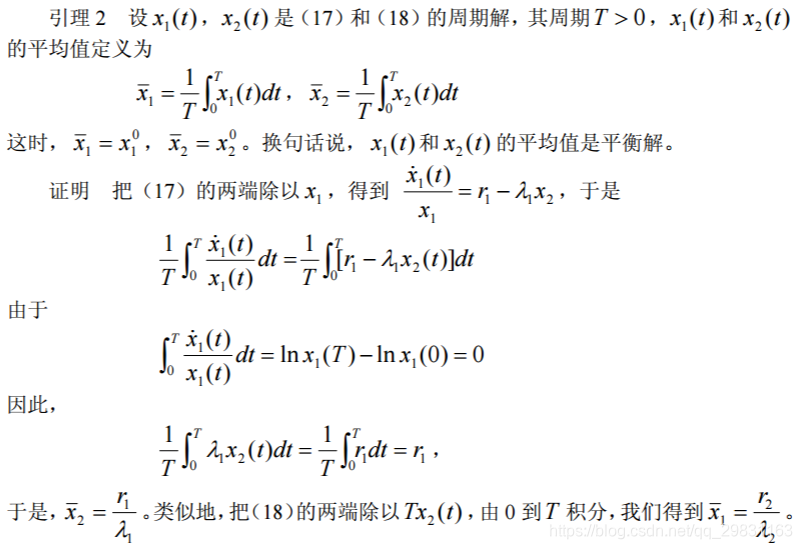
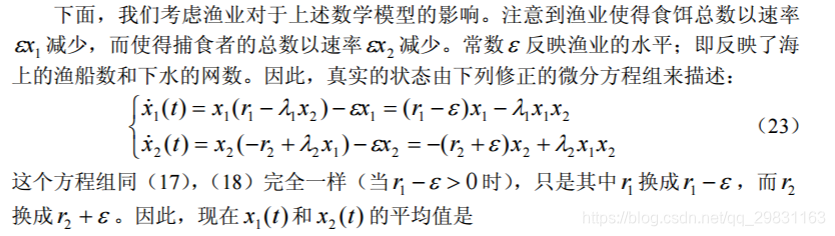
2 模型分析
习 题
1. 单棵树木的商品价值V 是由这棵树能够生产的木材体积和质量所决定的。显然 V = V(t) 依赖于树木的年龄 t 。假设曲线V(t) 已知, c 为树木砍伐成本。试给出砍伐 树木(更确切地说砍伐相同年龄的树木)的最优年龄。如果考虑到森林轮种问题,即一 旦树木从某一处砍掉,这块土地便可以种植新树,假定各轮种周期具有相等的长度,试 建模讨论最优砍伐轮种的森林管理策略的问题。
2. 如果两个种群都能独立生存,共处时又能相互提供食物,试建立种群依存模型 并讨论平衡点及稳定性,解释稳定的意义。
3. 如果两个种群都不能独立生存,但共处时可以相互提供食物,试建模以讨论共 处的可能性.。
4. 如果在食饵—捕食者系统中,捕食者掠夺的对象只是成年的食饵,而未成年的 食饵因体积太小免遭捕获。在适当的假设下建立这三者之间关系的模型,求平衡点。
稳定状态模型系列博文:
稳定状态模型 (一): 微分方程稳定性理论简介 :自治系统、动力系统、相平面、相图、轨线 、 奇点、孤立奇点;
稳定状态模型 (二):再生资源的管理和开发 :资源增长模型 、资源开发模型 、经济效益模型、 种群的相互竞争模型

















 797
797

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









