








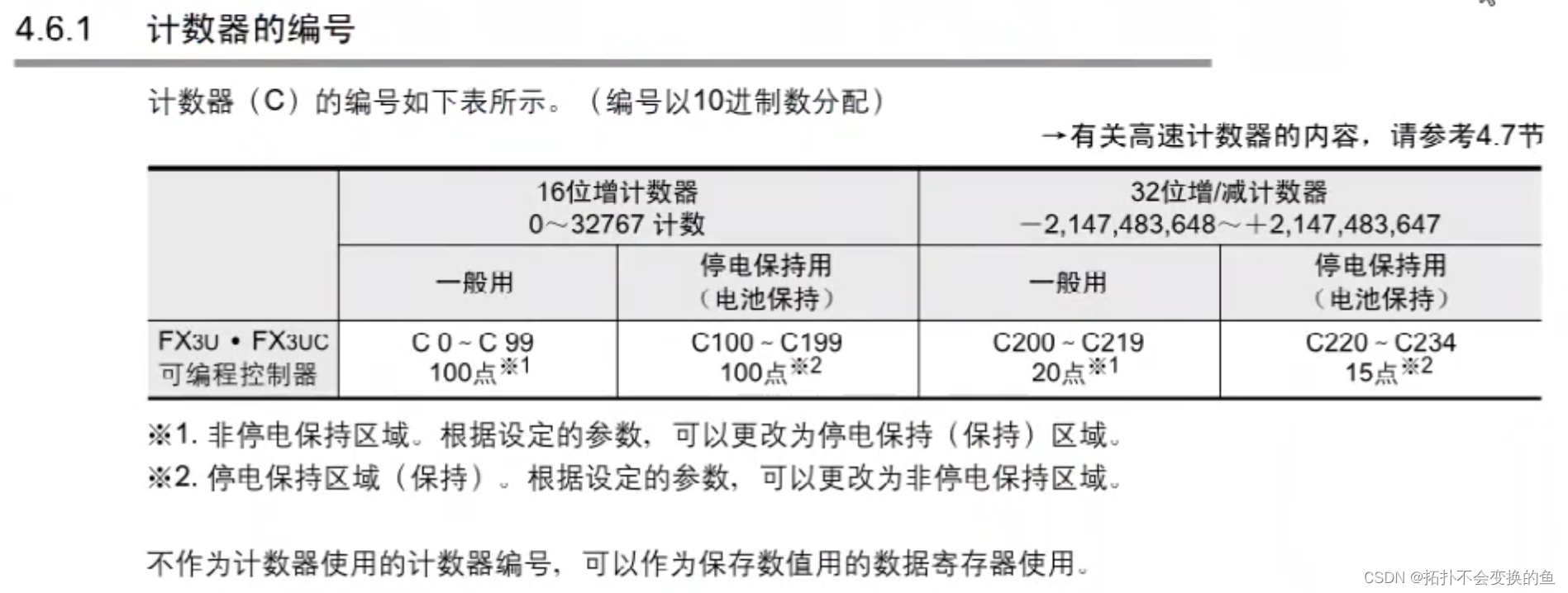
一、计数器[C]
注意!
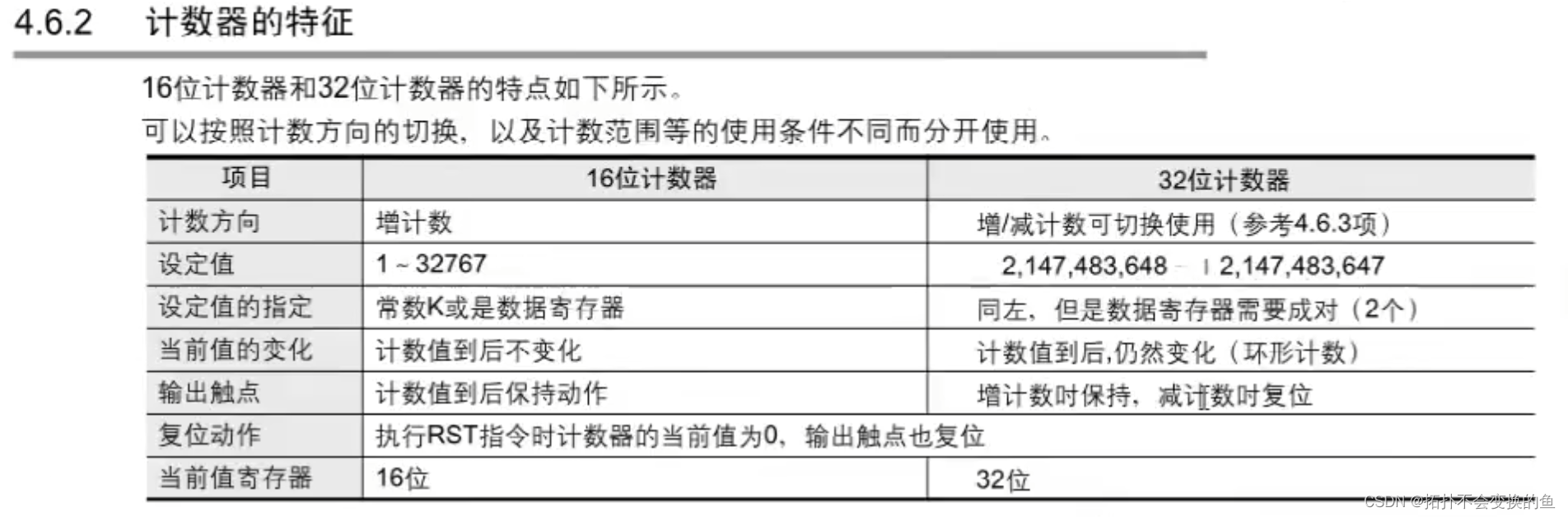
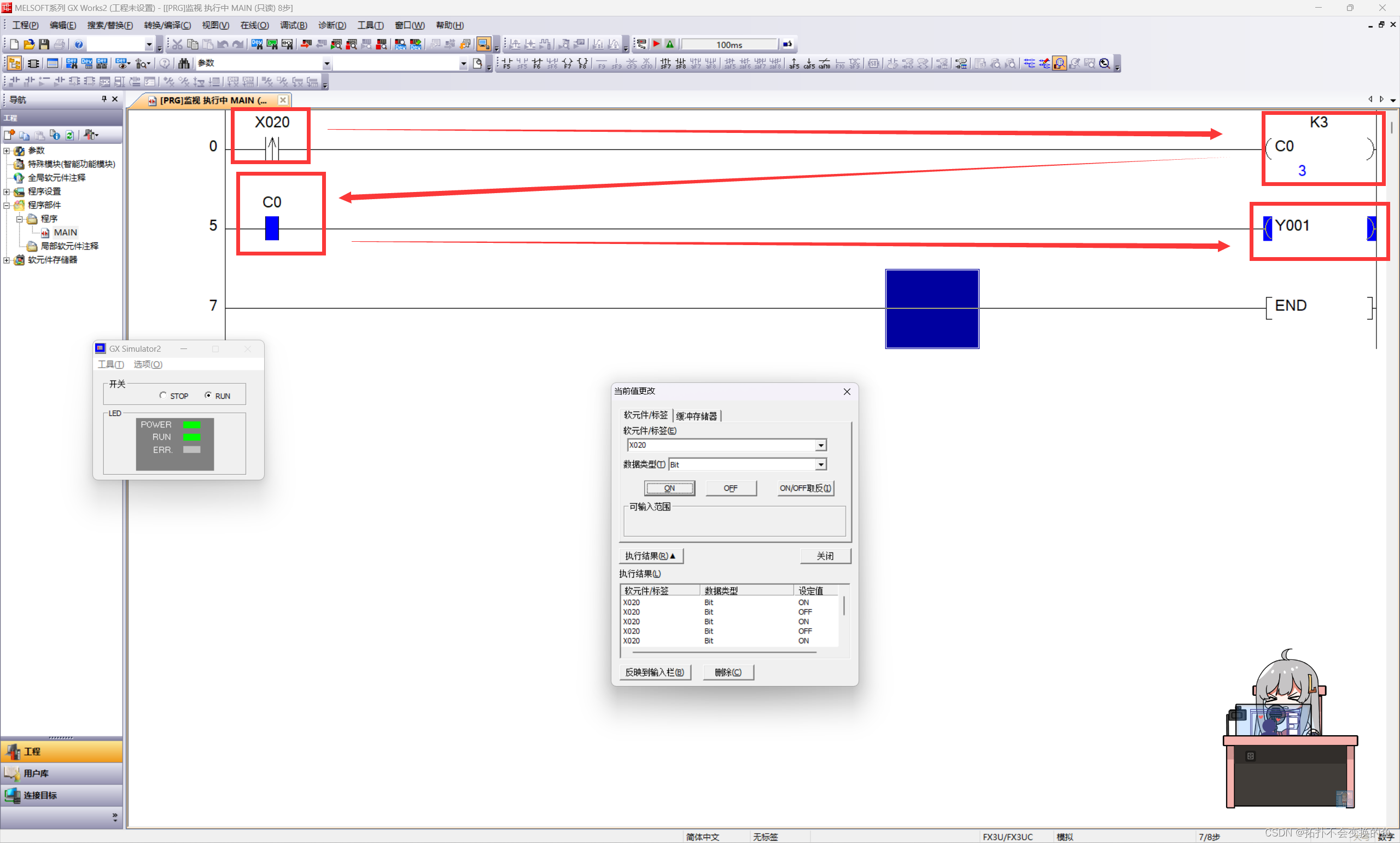
1、16位计数器到达后即使再次增加,计数器数值也不会增加且输出为保持型。
2、32位计数器和16位计数器相反,计数器到达后即使再次增加计数器数值也会继续向上增加且输出为保持型。
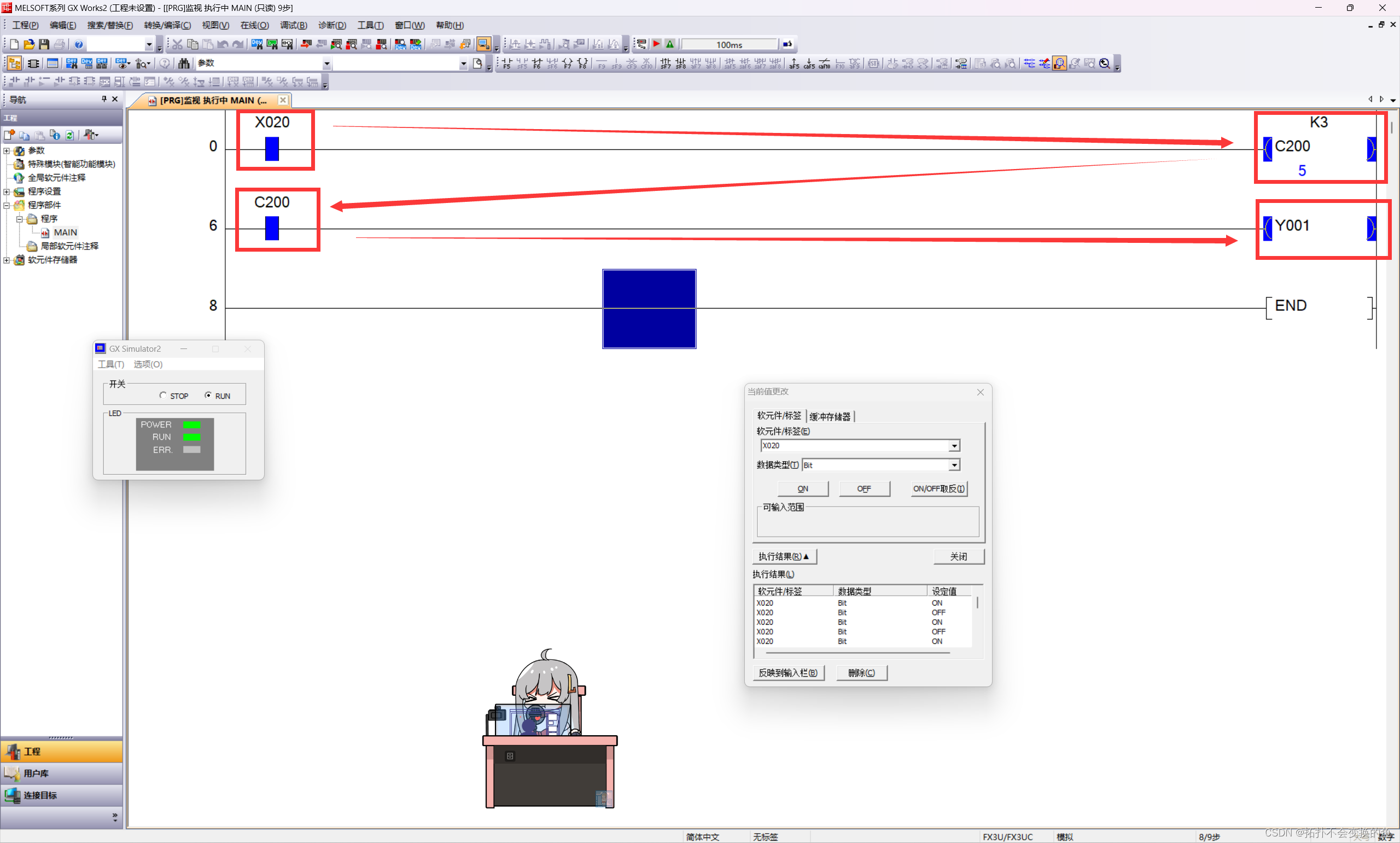
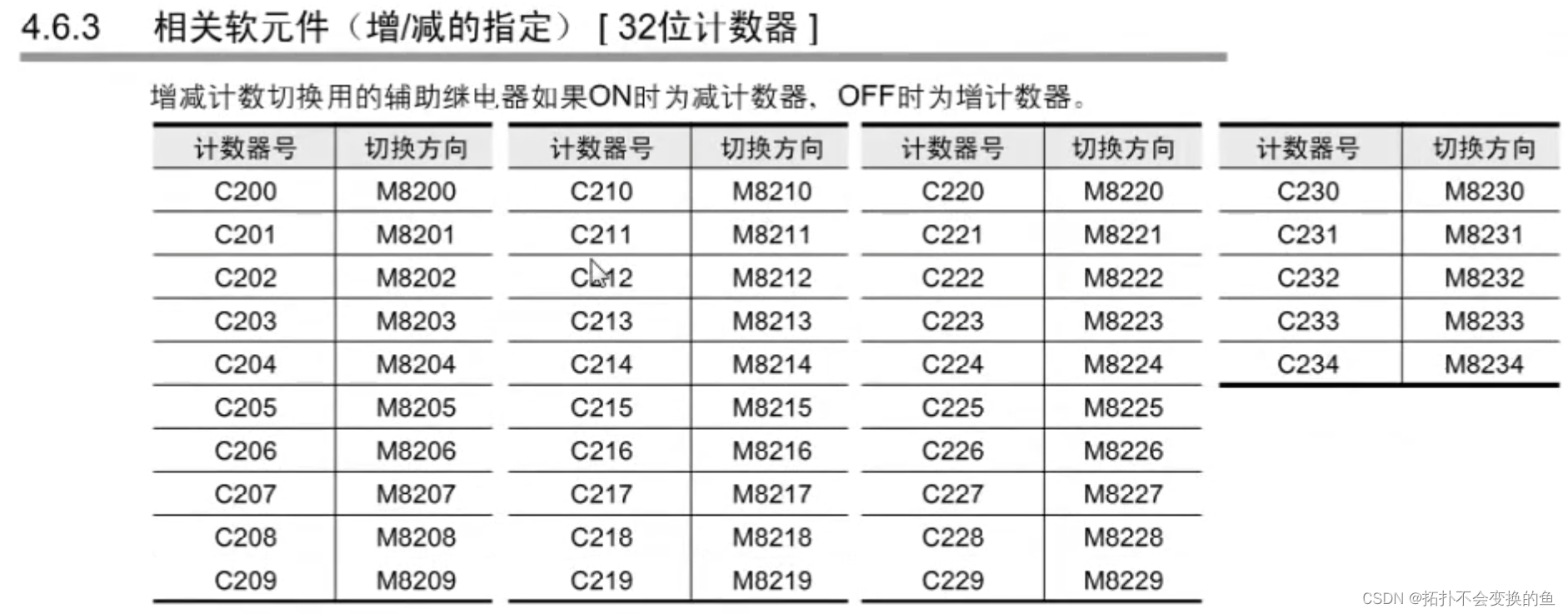
3、32位计数器在进行负数计数时,一定要从 小 到 大 计数不然就算到达设定好的数值也依旧不会接通。下图是从 0 开始往下计数
( 0 --> -1 --> -2 --> -3) 是从 大 到 小 计数,所以在到达-3时并不会接通C200。
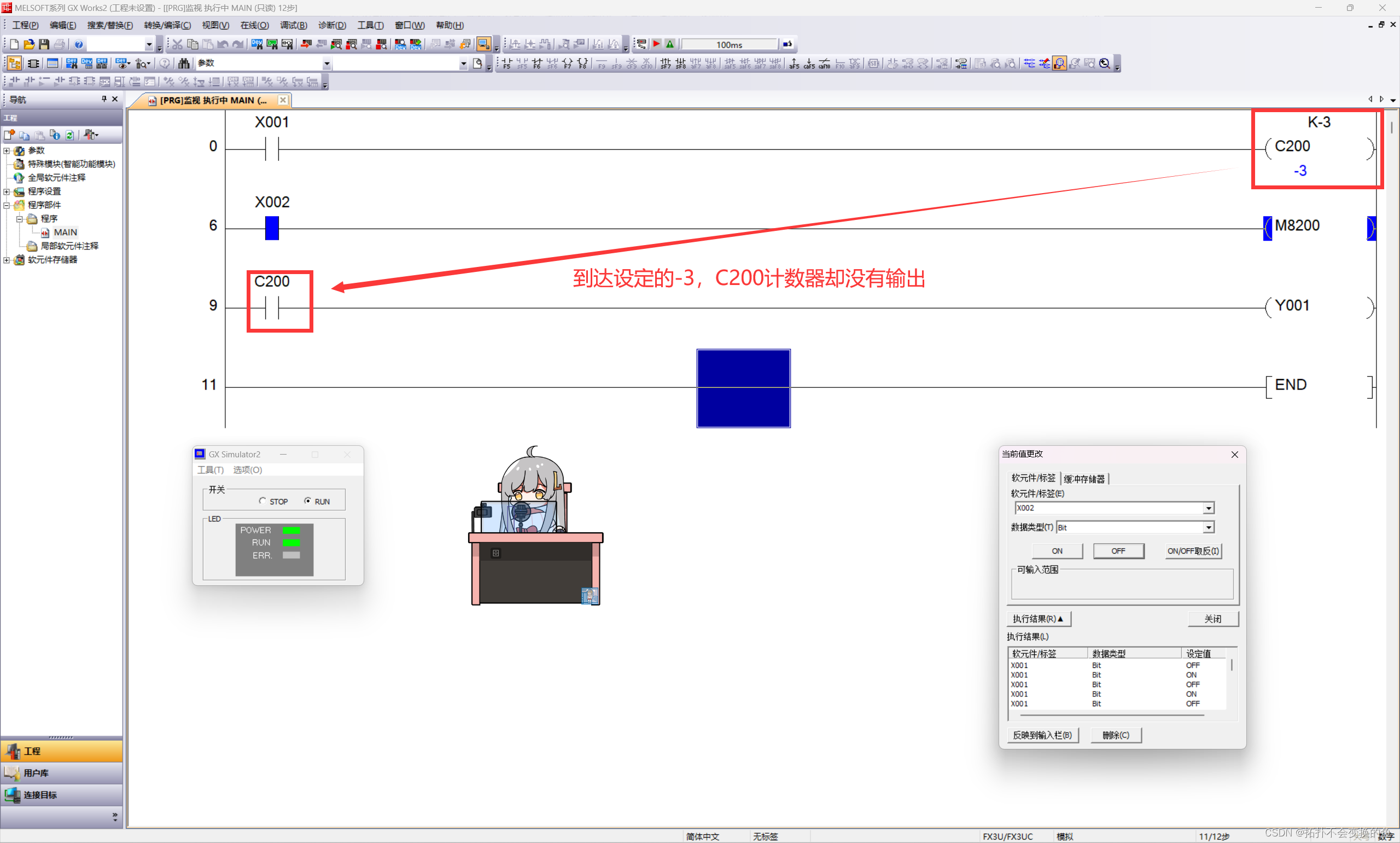
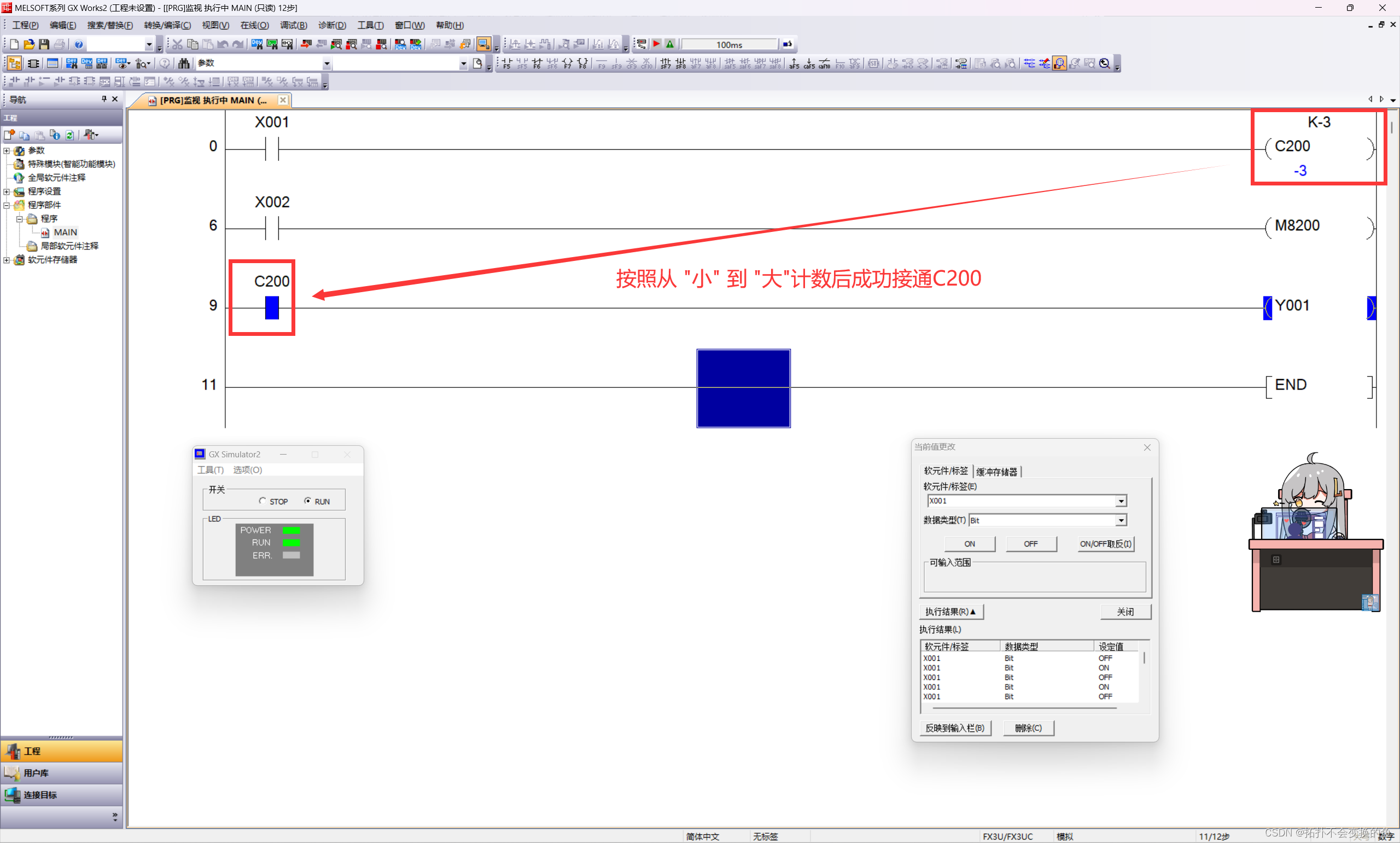
下图是修改后从 -6 开始往上计数
( -6 --> -5 --> -4 --> -3) 是从 小 到 大 计数,所以在到达-3时成功接通了C200。
二、计数器和计时器小练习
需求:结合上一章学习的计时器,下图中手动按下按钮进行供给指令Y0输出,在前两次运动至光电X0下时会停下输送带Y1,推出机构Y2会将物料推送至下方的黄色篮子中,每当放到三的倍数次数时就会忽略掉该次物料让其掉下输送带。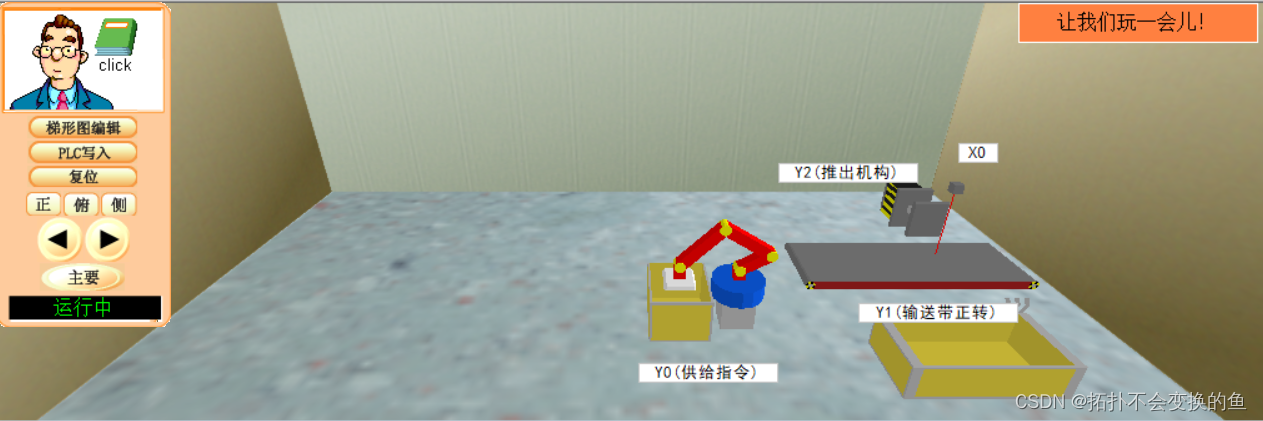
梯形图:
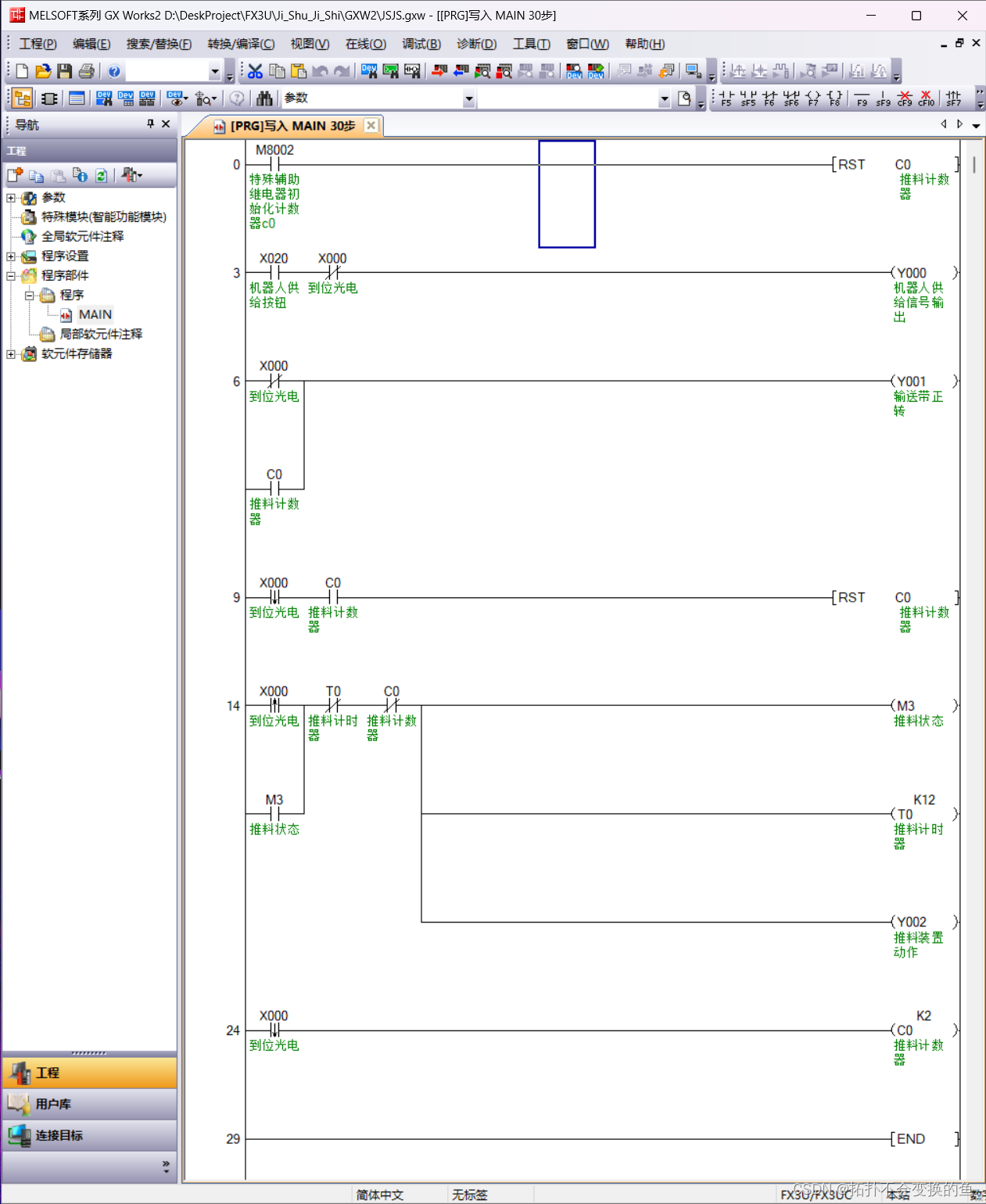
效果图:
计数器和计时器小练习
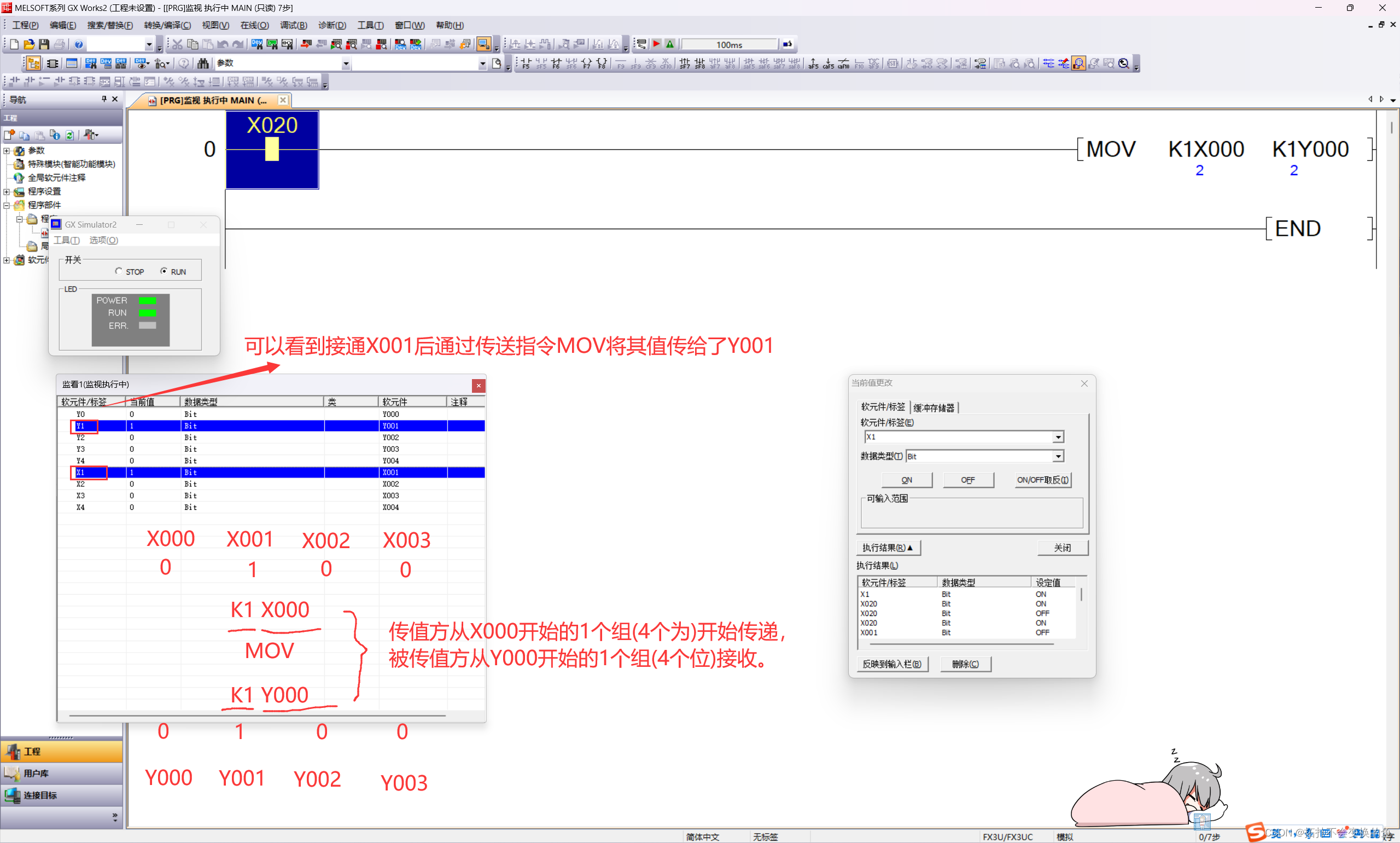
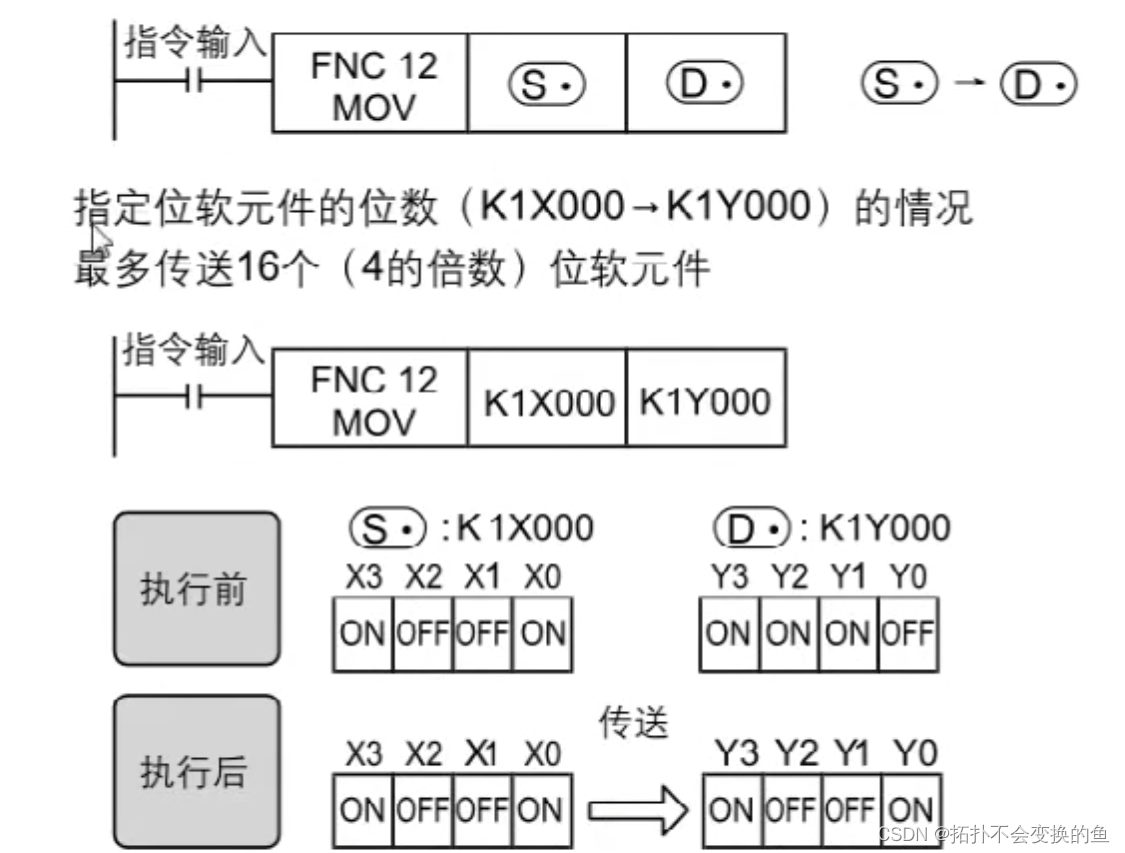
三、位元件组合
1、介绍:
组合位是由多个连续的位元件组合而成的数据结构。每个组合位由一个首位位元件和多个连续的位元件组成,用KnX、KnY、KnM、KnS表示,其中n表示组数,数值在1~8之间。位元件有输入继电器(X)、输出继电器(Y)、辅助继电器(M)和状态继电器(S)等四种。通过将连续的位元件合并成一个单元,可以更方便地进行数据存储和处理。
2、格式:
K n(1~8) X n
解析:K为整数,n代表有多少组, 一组有4个位(K1就为4个位,K2为8个位)后面的X为位元件:输入继电器(X)、输出继电器(Y)、辅助继电器(M)和状态继电器(S),X后面的n代表从哪一位开始。
3、举例:
K4 Y0
一共有 4*4 = 16个位,从输出继电器Y0开始的16个位。第一组:Y0,Y1,Y2,Y3、第二组:Y4,Y5,Y6,Y7、第三组:Y10,Y11,Y12,Y13、第四组:Y14,Y15,Y16,Y17。(注意:8进制没有8!)
K2 M2
一共有 2*4 = 8个位,从辅助继电器M2开始的8个位。第一组:M2,M3,M4,M5、第二组:M6,M7,M10,M11。(注意:8进制没有8!)
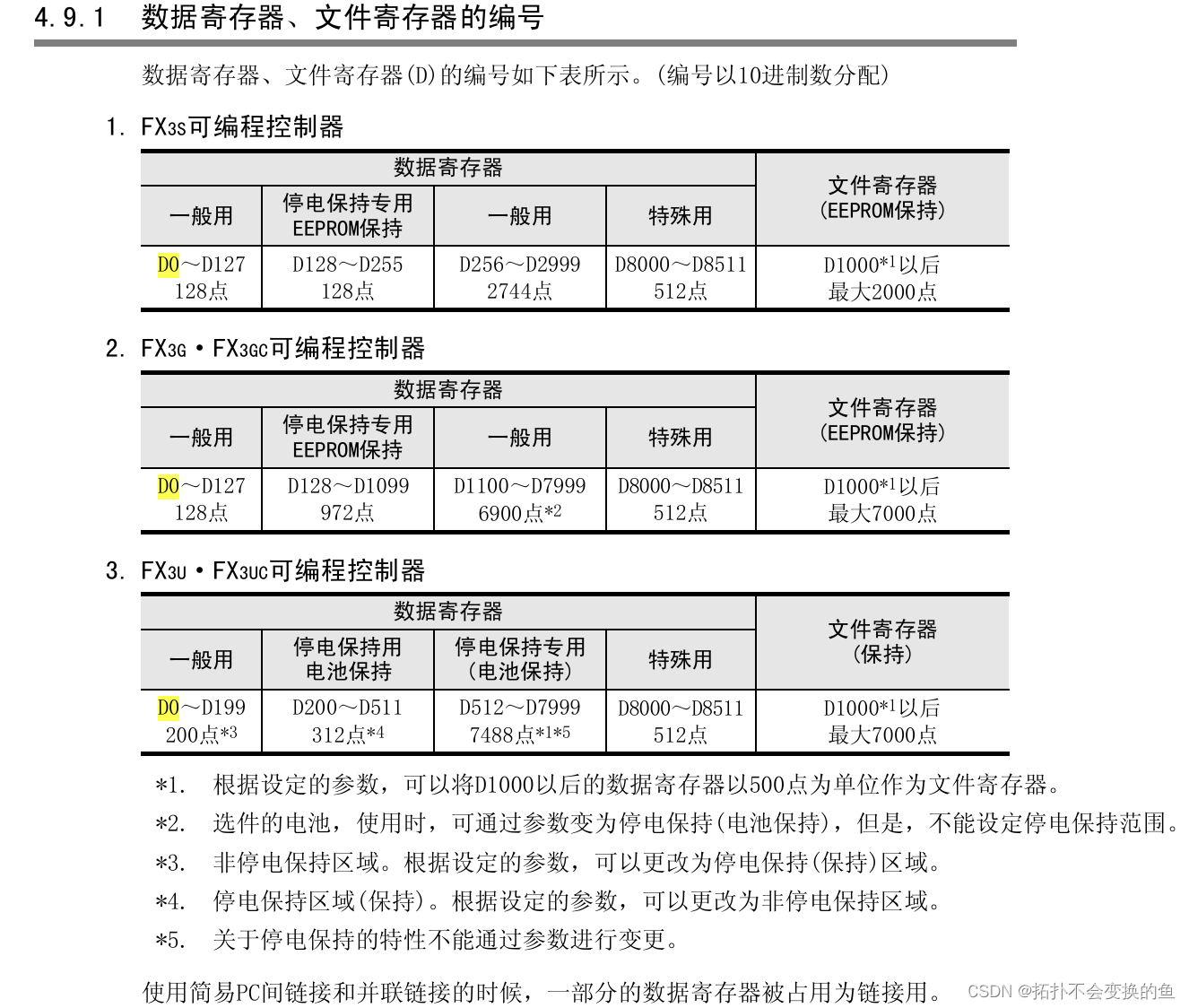
四、寄存器

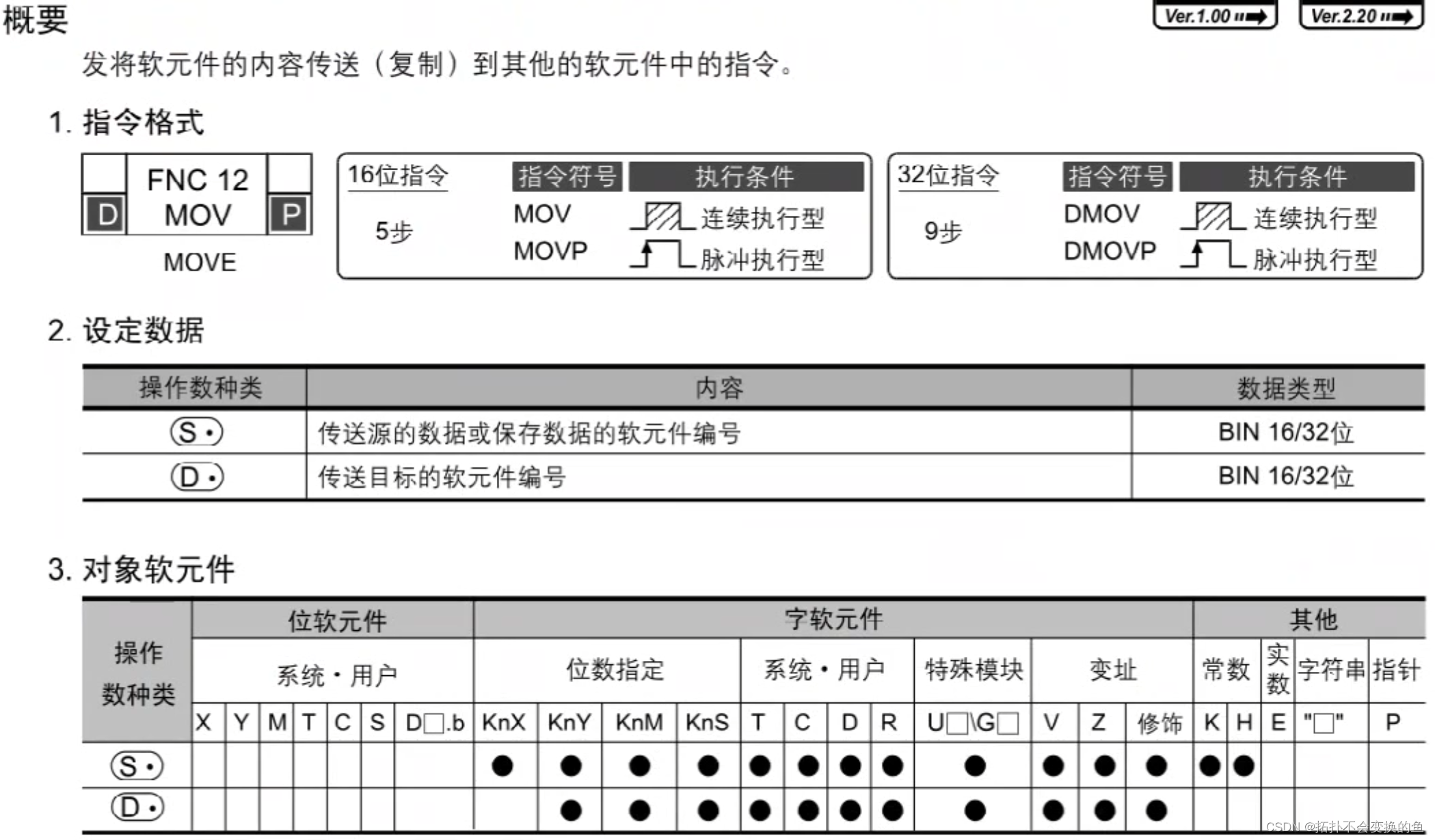
五、Mov传送指令
注意!
部分软元件无法作为传送目标(传值),例如输入继电器X。
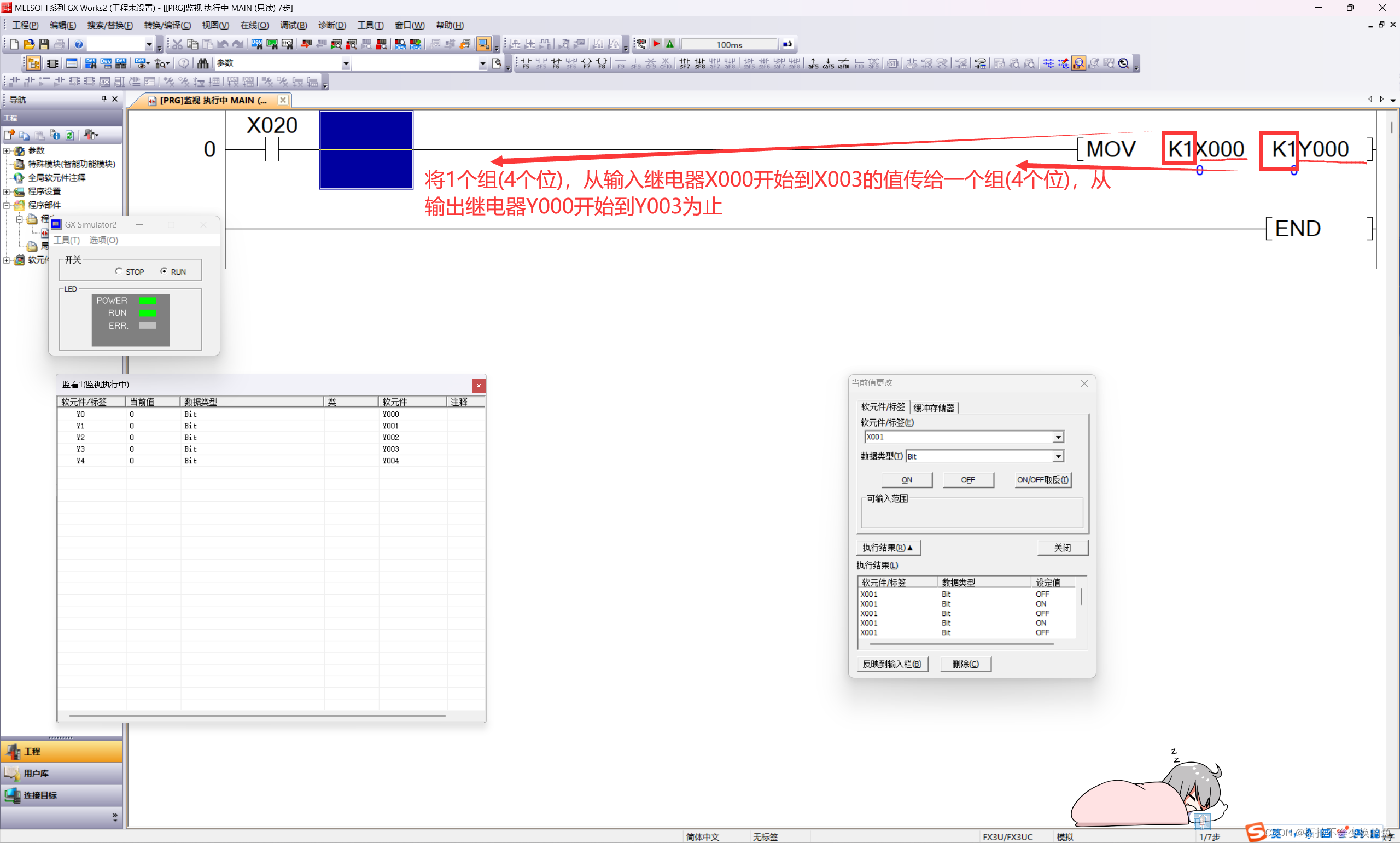
此时接通X001的同时接通X020后的输出结果:
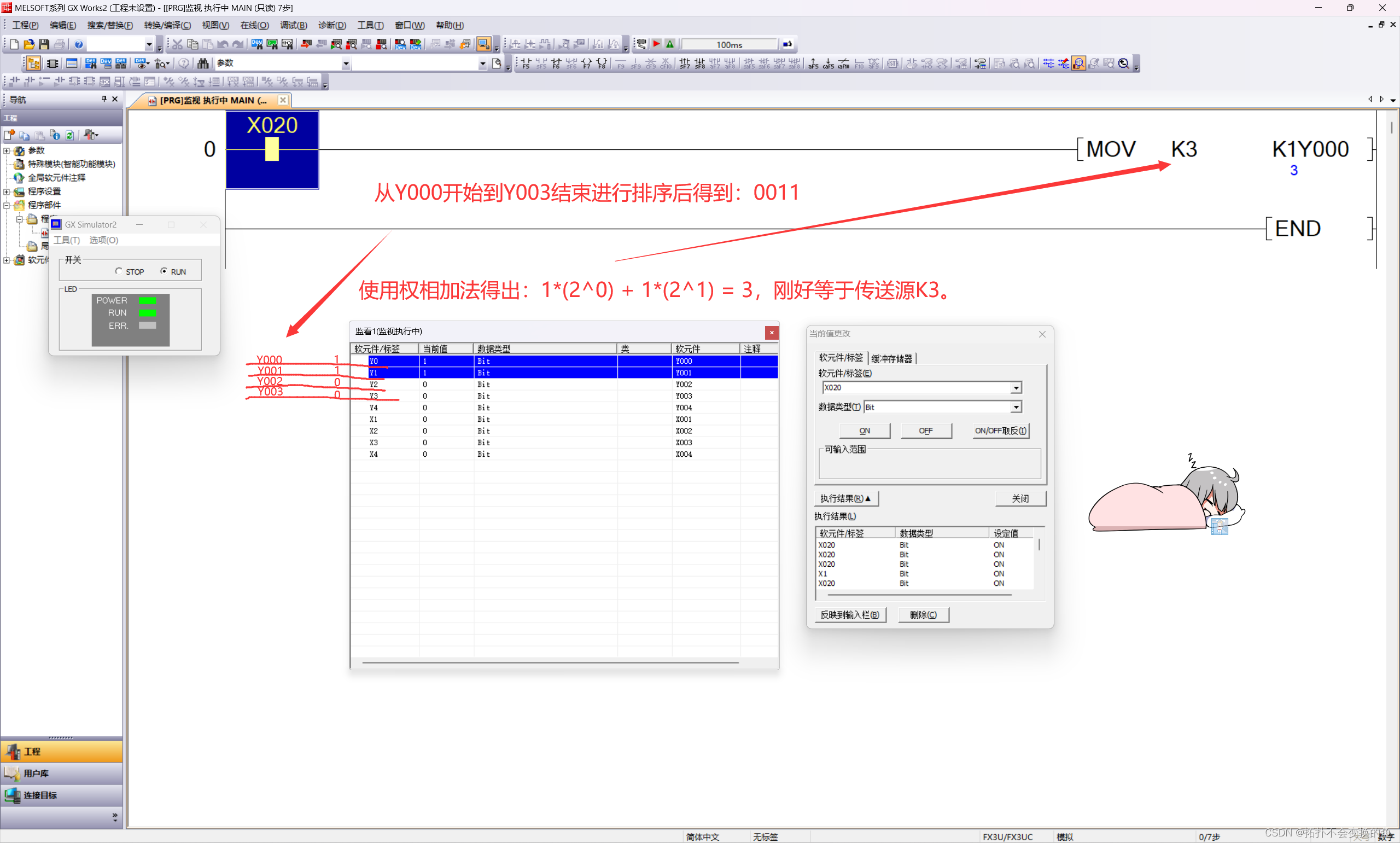
使用常数传值
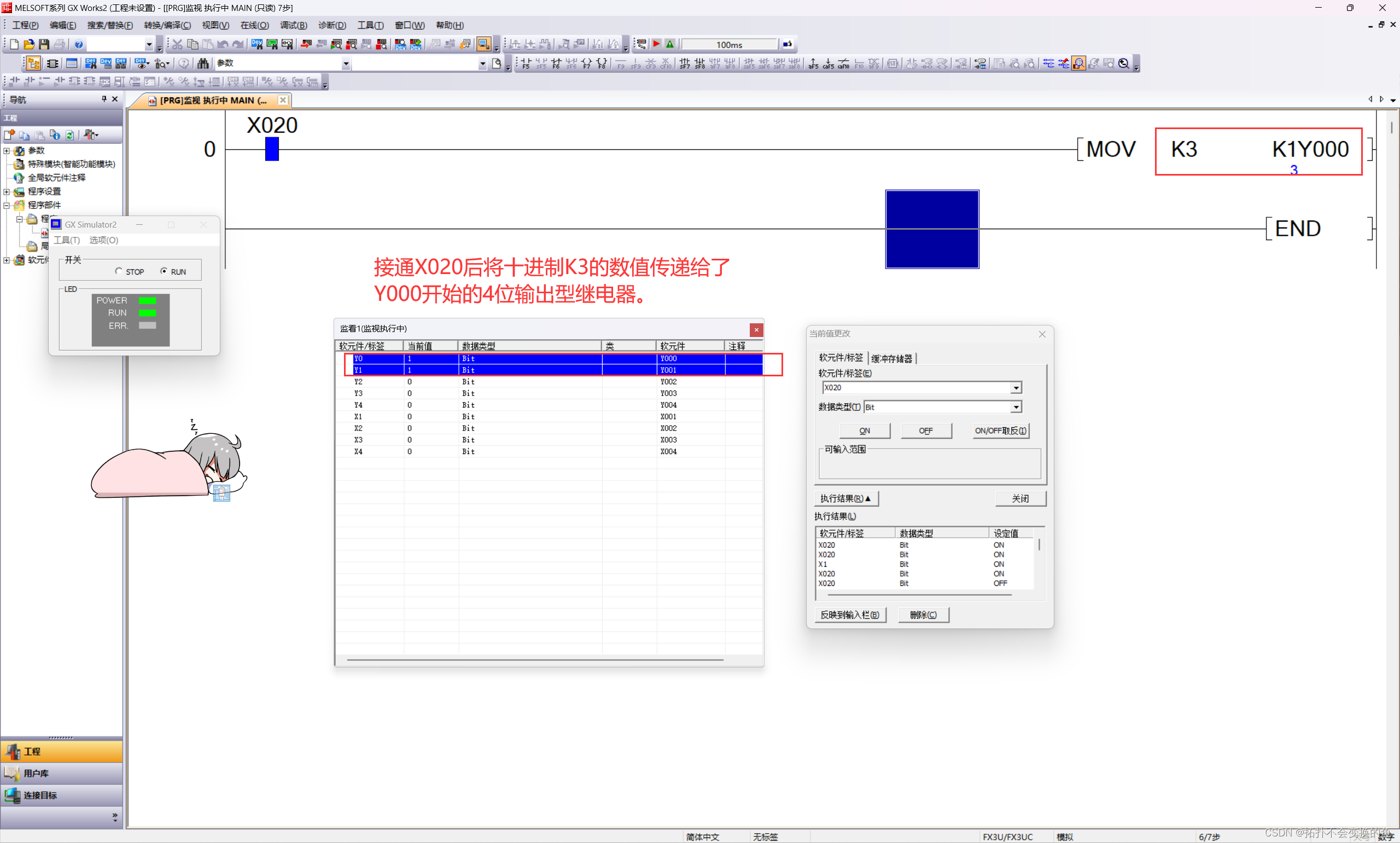
如何将十进制的3传递给4位输出型继电器的?为何只有Y000和Y001是接通状态?先让我们来详细了解一下传送MOV的动作
 当传送源为常数(K、H、E)时会自动转换为BIN(二进制),那么结合上图K3作为传送源自然会被转换为二进制的0011。
当传送源为常数(K、H、E)时会自动转换为BIN(二进制),那么结合上图K3作为传送源自然会被转换为二进制的0011。
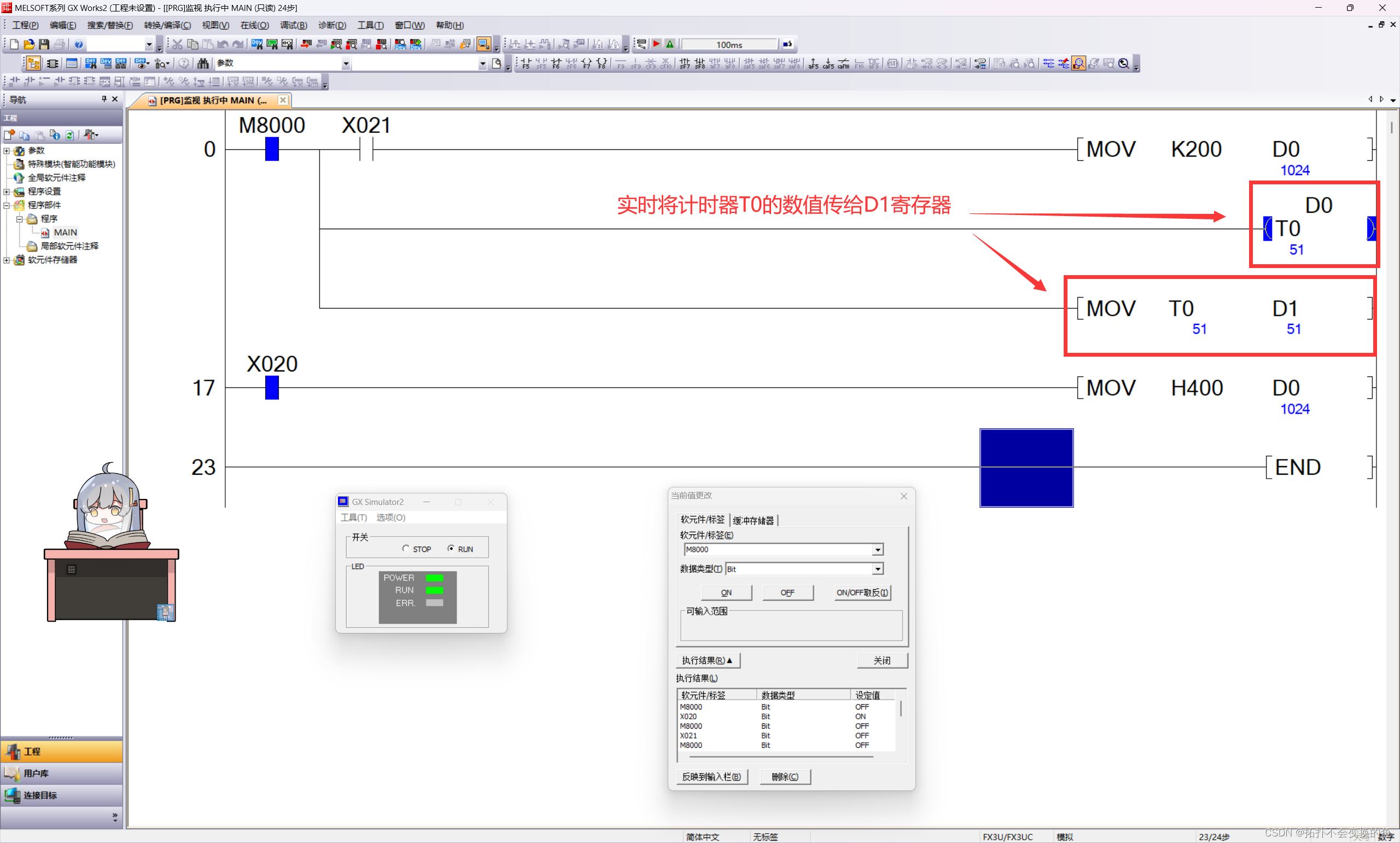
使用MOV将寄存器的值传给定时器。

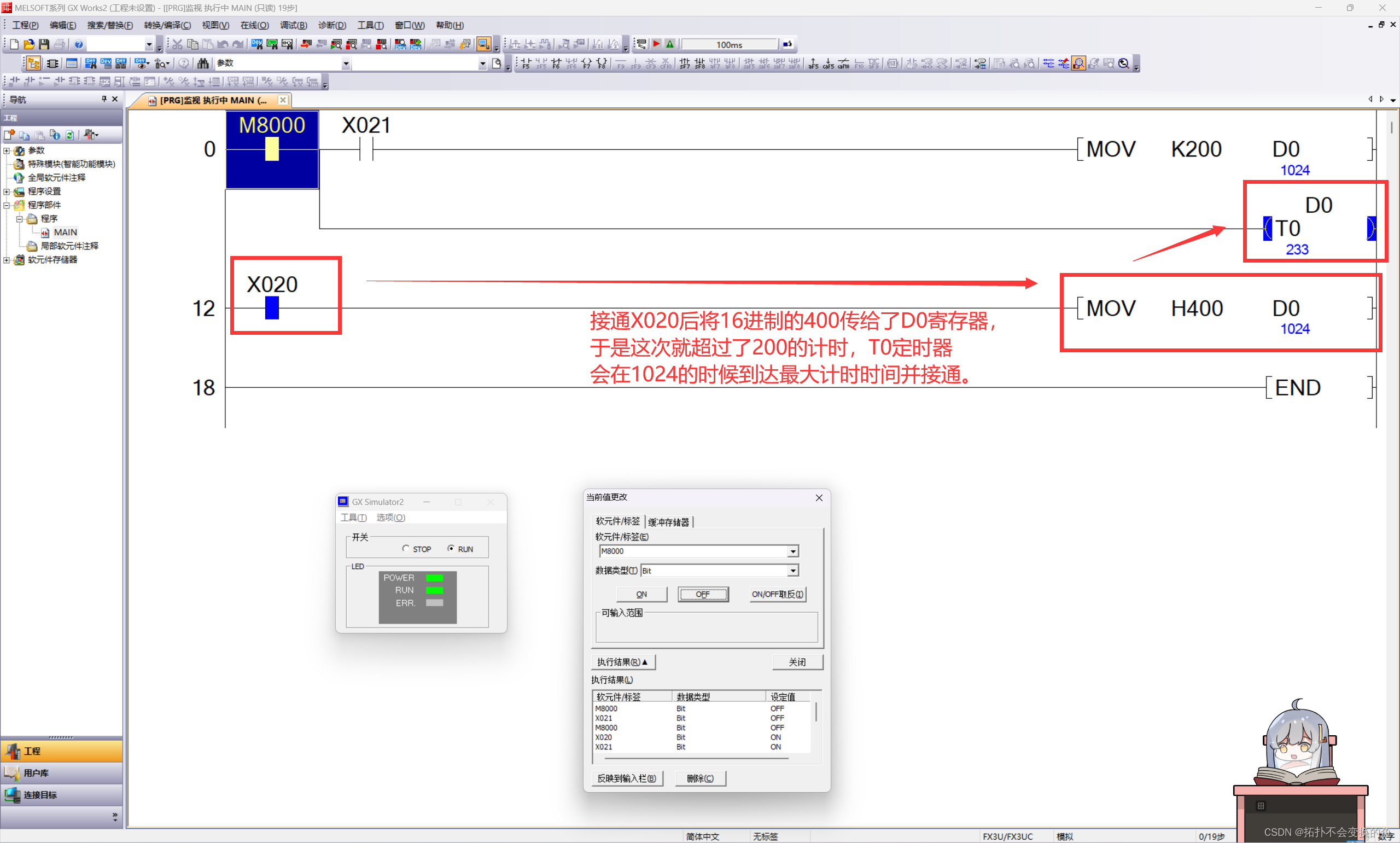
MOV还能将计时器或是计数器等元件的值进行传递。
六、变址寄存器[V、Z]
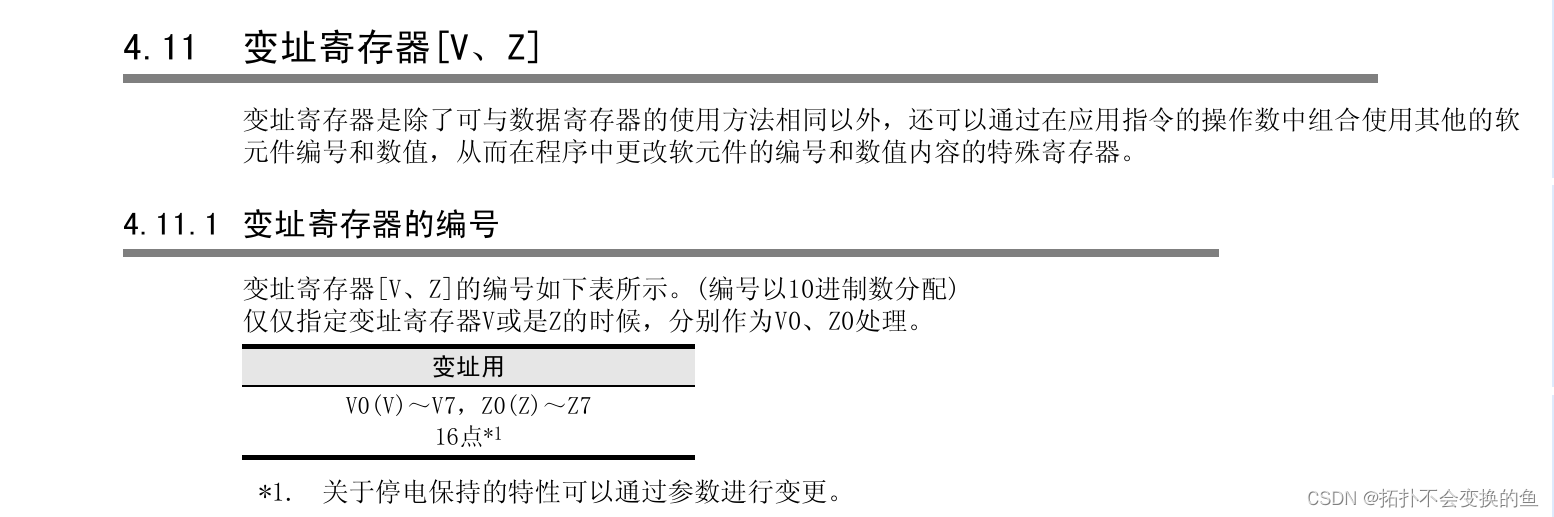
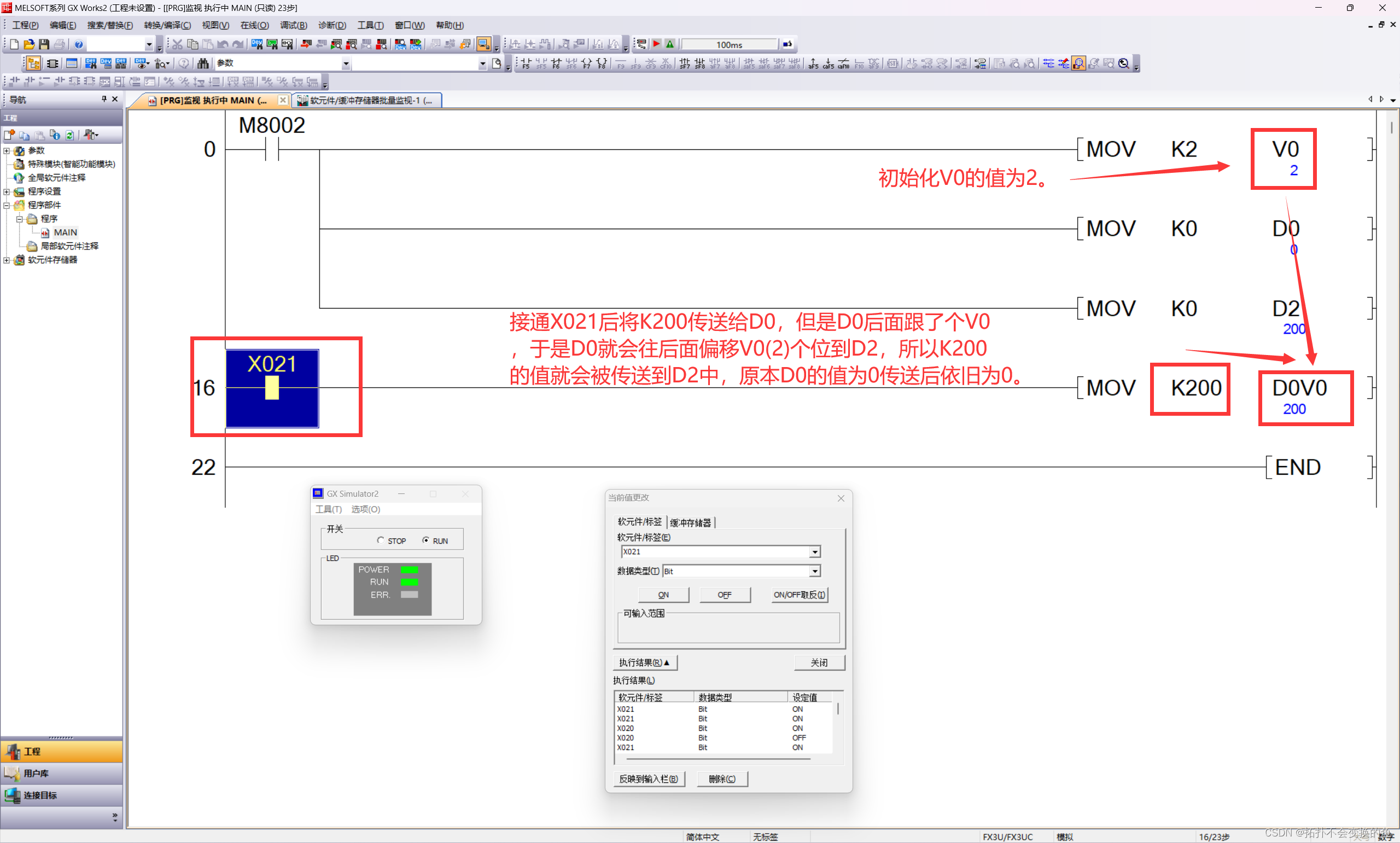
可以用作于改变传送的值。
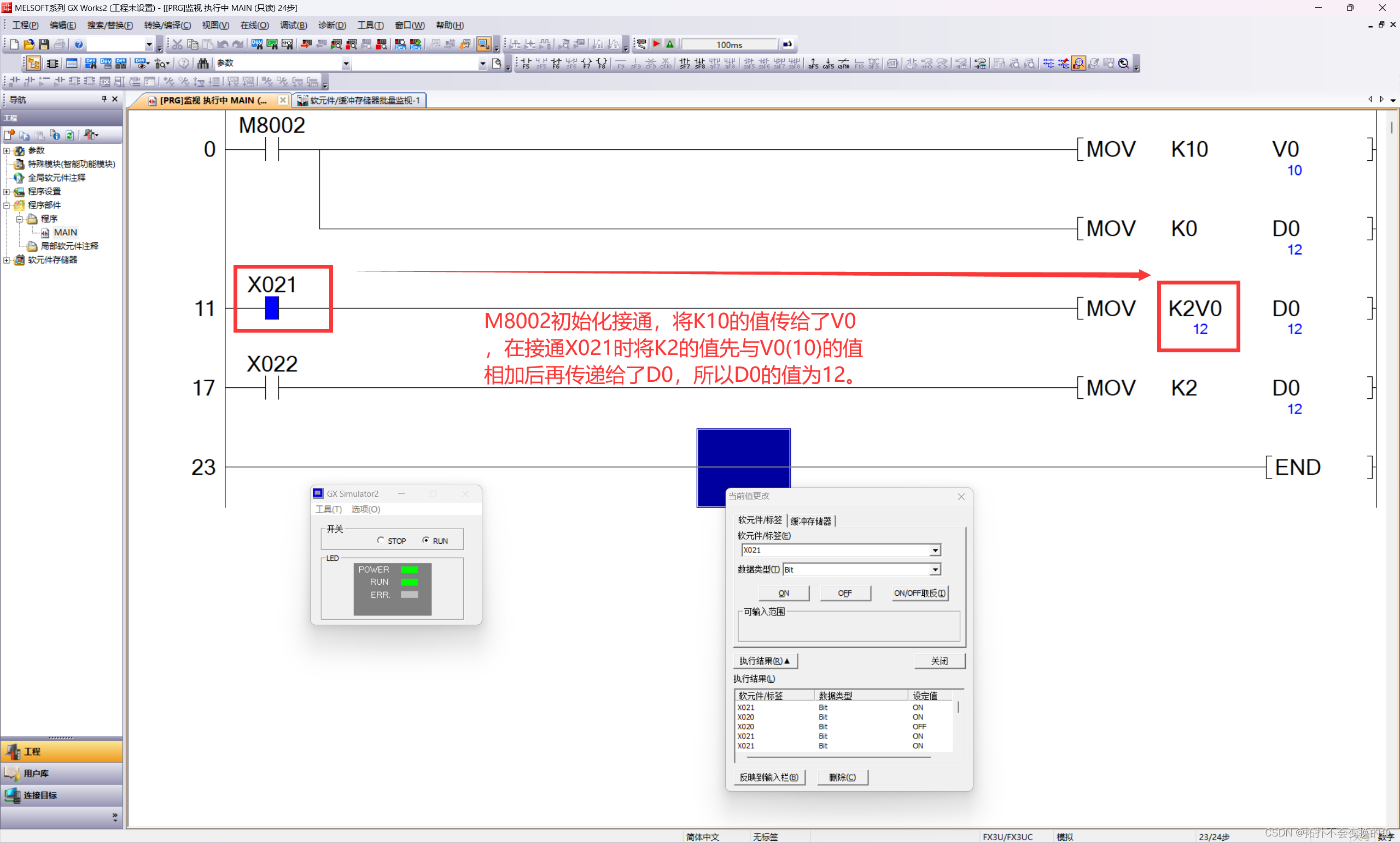
改变用作于接收传送的地址。
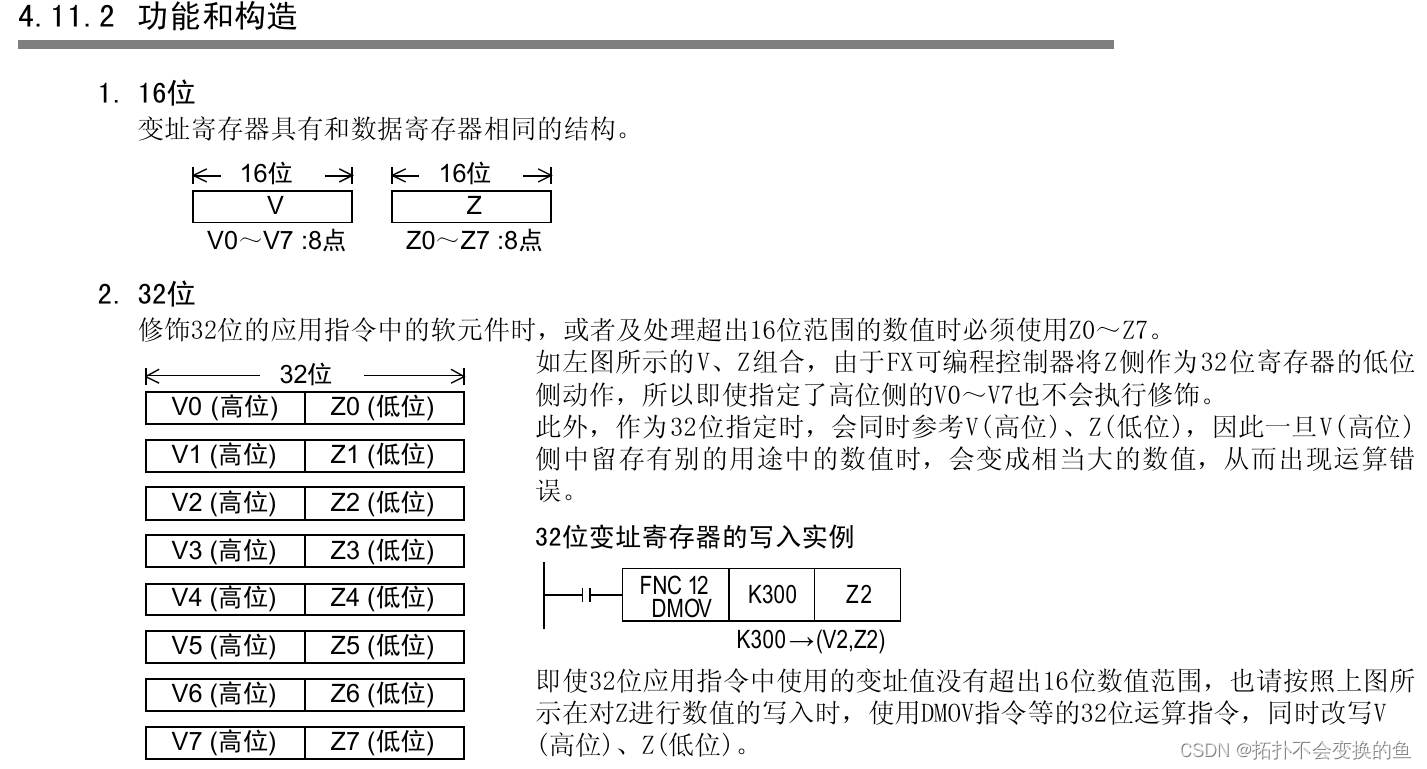
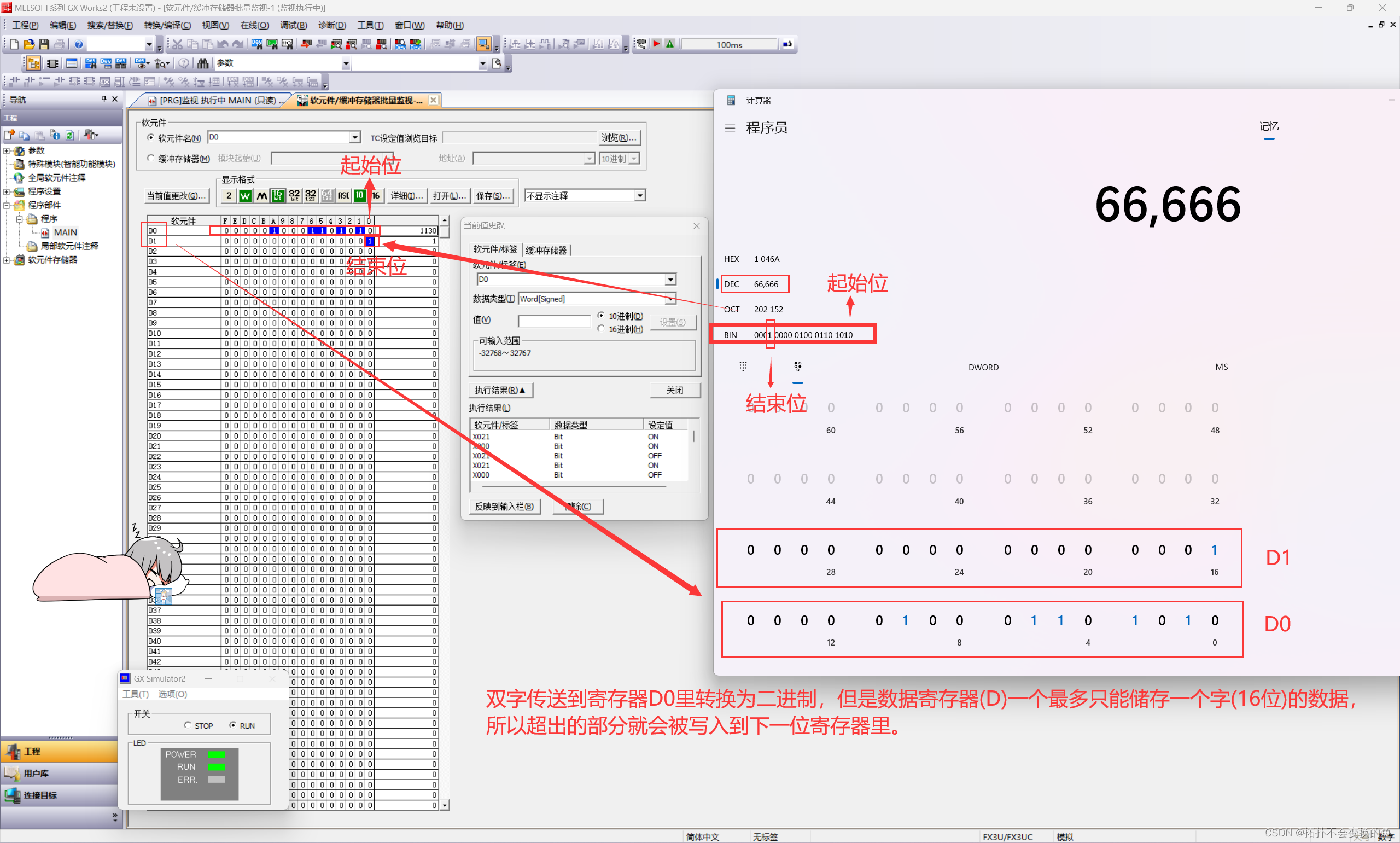
双字传送的错误用法。
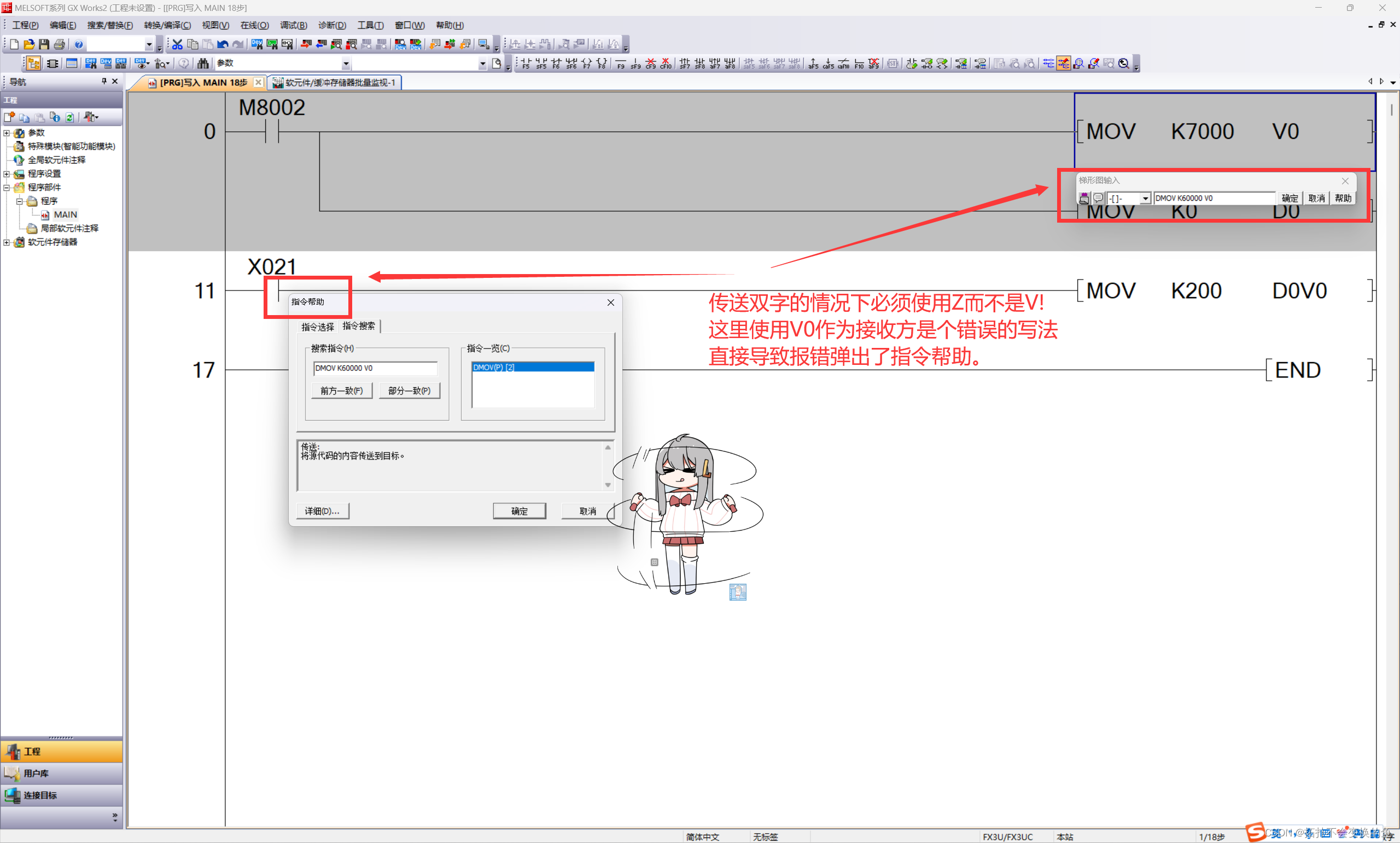
使用单字传送MOV指令传送双字给数据寄存器。
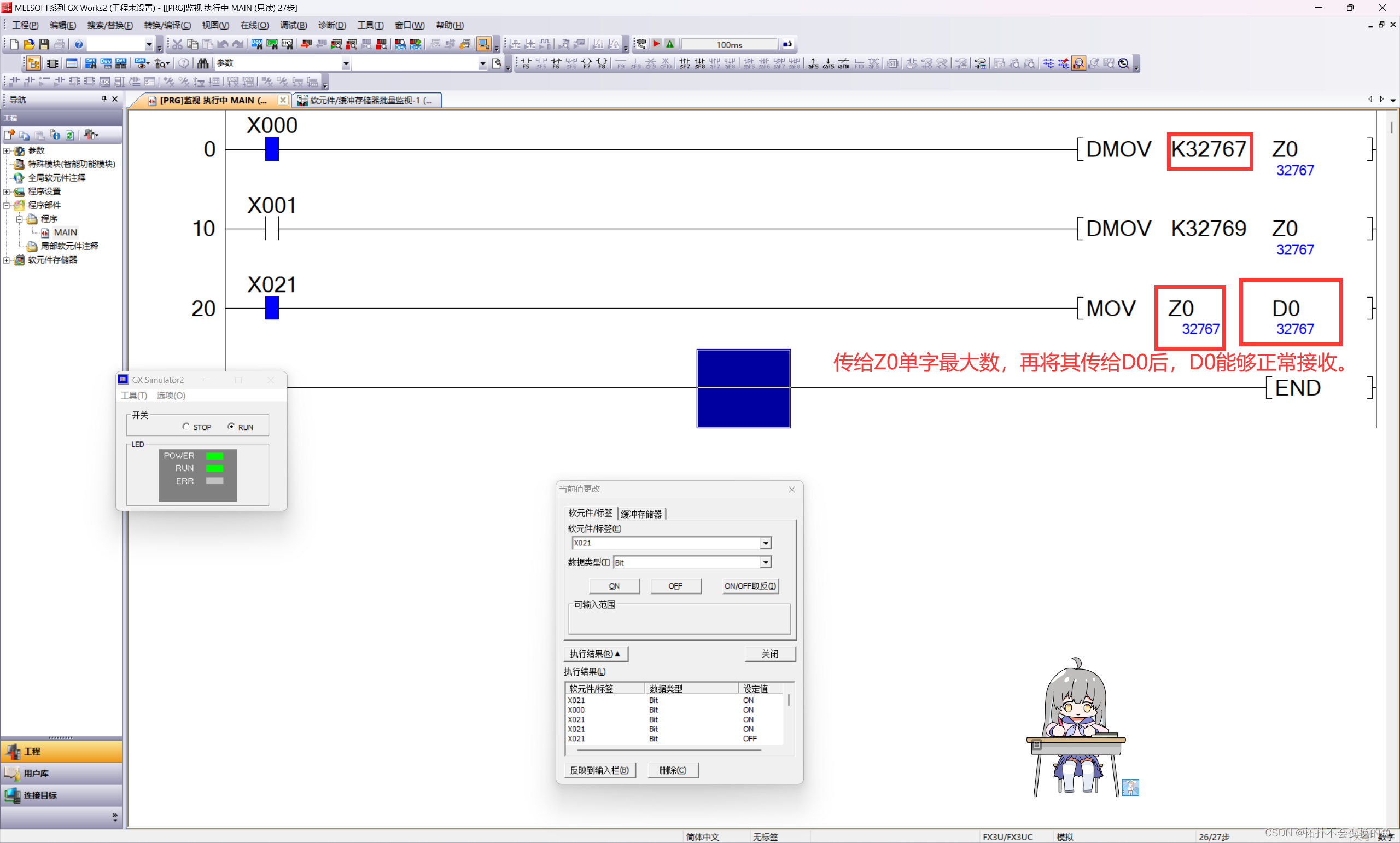
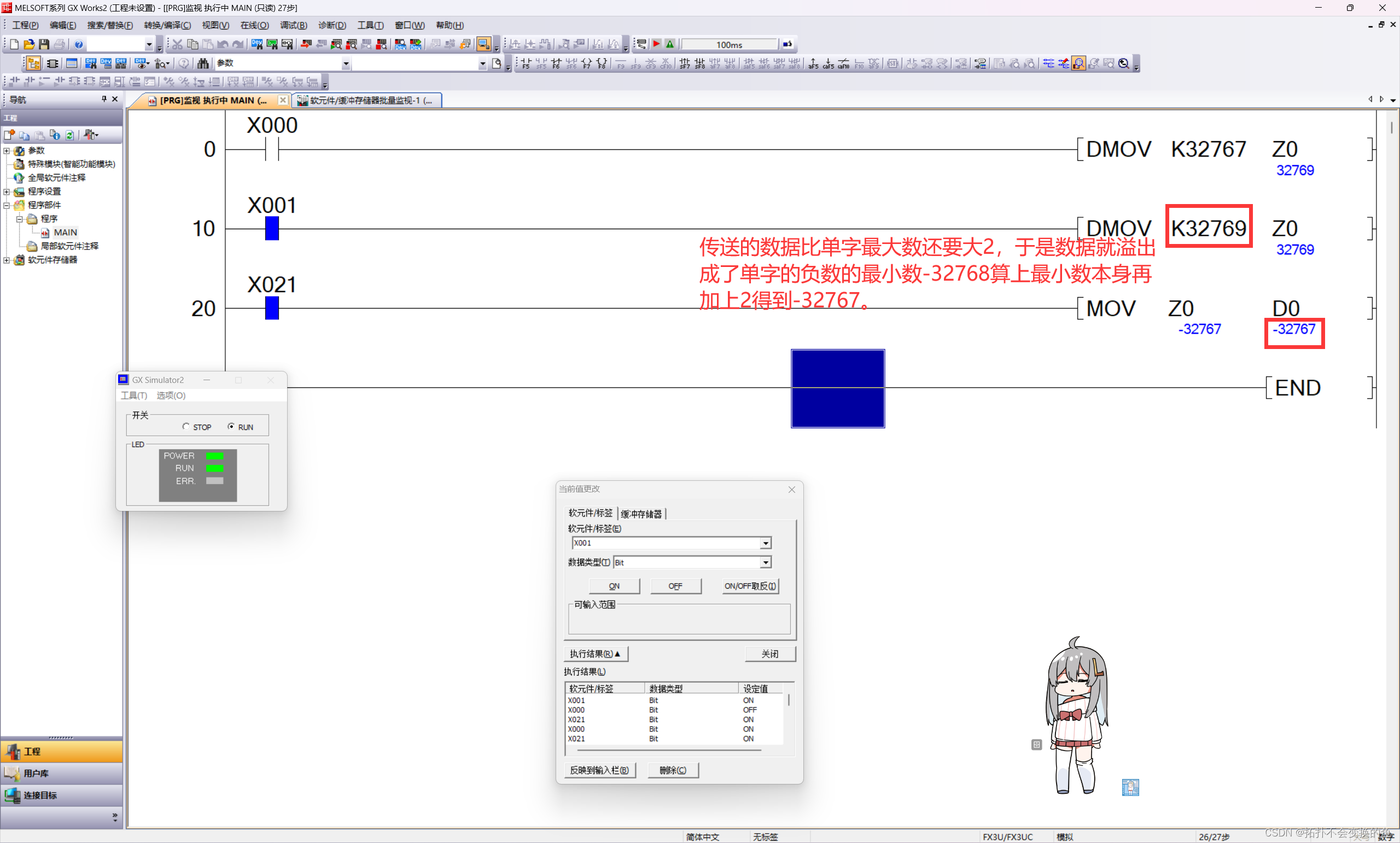
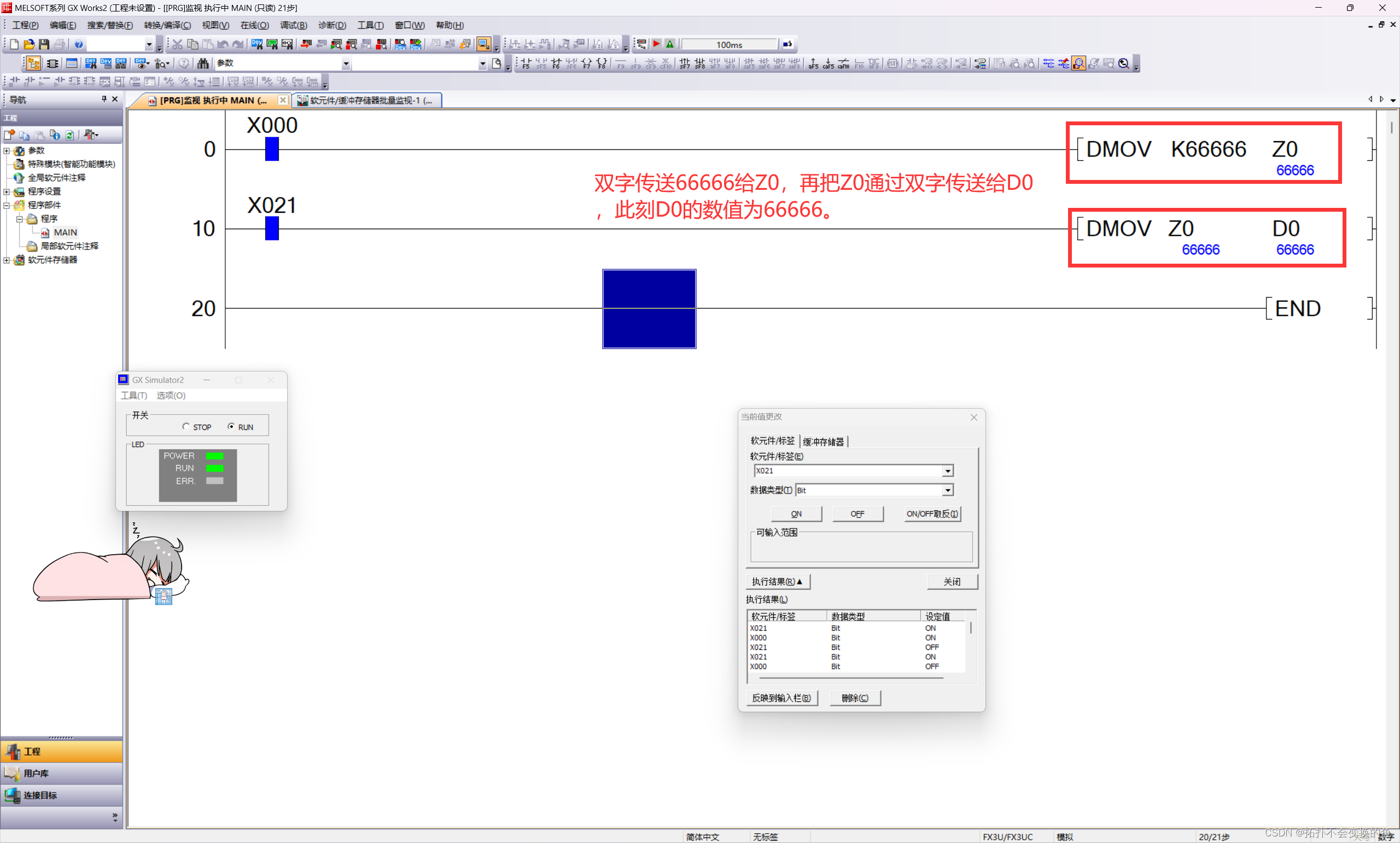
正确的使用双字传送。
七、跳转指令CJ



过长的扫描周期会报错。


P63为程序总结束(END),可以直接使用无需输入P63指针。


















 1477
1477

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









