









环境说明
- jetson nano: 4GB B01
- JetPack:4.6.1
- intel realsense SDK 2.5.1
一. jetson nano 更换ubuntu源
jetson nano系统自带的Ubuntu 18.04 LTS,镜像默认的是Ubuntu官方源,在国内使用该源下载程序速度较慢,所以需要更换。
-
在终端输入命令打开sources.list文件
sudo gedit /etc/apt/sources.list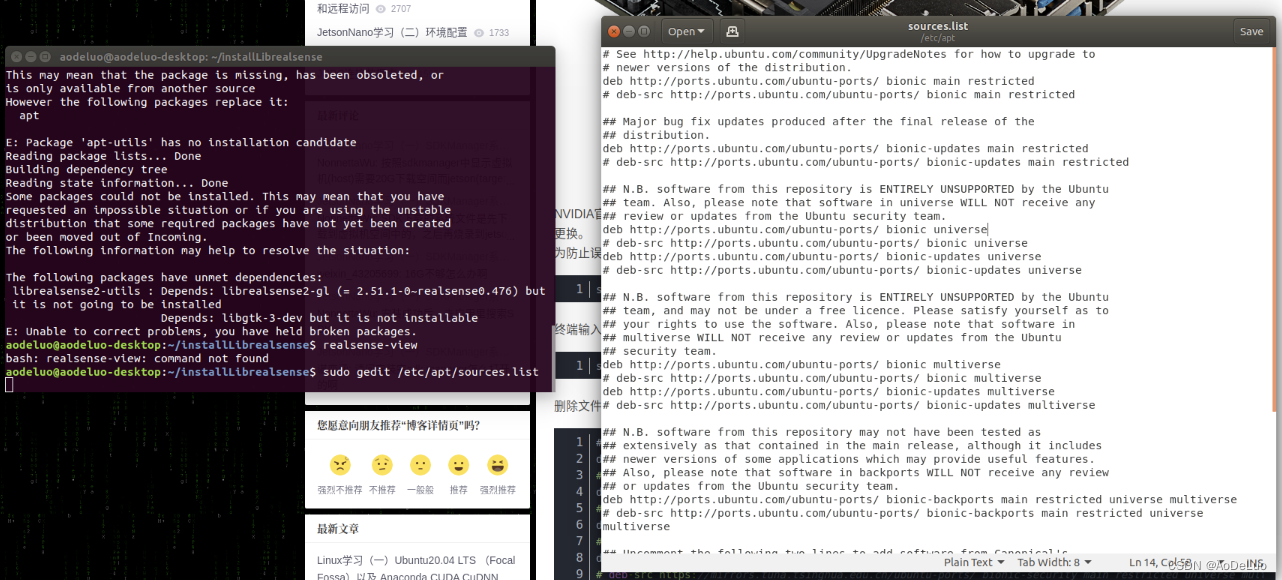
-
删除文件内所有内容,添加以下之一的镜像源即可:
清华大学镜像源:# 默认注释了源码镜像以提高 apt update 速度,如有需要可自行取消注释 deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic main restricted universe multiverse # deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic main restricted universe multiverse deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-updates main restricted universe multiverse # deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-updates main restricted universe multiverse deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-backports main restricted universe multiverse # deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-backports main restricted universe multiverse deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-security main restricted universe multiverse # deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-security main restricted universe multiverse deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-proposed main restricted universe multiverse deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-proposed main restricted universe multiverse中国科学技术大学镜像源:
# 默认注释了源码镜像以提高 apt update 速度,如有需要可自行取消注释 deb http://mirrors.ustc.edu.cn/ubuntu-ports bionic main restricted universe multiverse # deb-src http://mirrors.ustc.edu.cn/ubuntu-ports bionic main restricted universe multiverse deb http://mirrors.ustc.edu.cn/ubuntu-ports bionic-updates main restricted universe multiverse # deb-src http://mirrors.ustc.edu.cn/ubuntu-ports bionic-updates main restricted universe multiverse deb http://mirrors.ustc.edu.cn/ubuntu-ports bionic-backports main restricted universe multiverse # deb-src http://mirrors.ustc.edu.cn/ubuntu-ports bionic-backports main restricted universe multiverse deb http://mirrors.ustc.edu.cn/ubuntu-ports bionic-security main restricted universe multiverse # deb-src http://mirrors.ustc.edu.cn/ubuntu-ports bionic-security main restricted universe multiverse deb http://mirrors.ustc.edu.cn/ubuntu-ports bionic-proposed main restricted universe multiverse deb-src http://mirrors.ustc.edu.cn/ubuntu-ports bionic-proposed main restricted universe multiverse阿里巴巴镜像源:
# 默认注释了源码镜像以提高 apt update 速度,如有需要可自行取消注释 deb https://mirrors.aliyun.com/ubuntu-ports/ bionic main restricted universe multiverse # deb-src https://mirrors.aliyun.com/ubuntu-ports/ bionic main restricted universe multiverse deb https://mirrors.aliyun.com/ubuntu-ports/ bionic-updates main restricted universe multiverse # deb-src https://mirrors.aliyun.com/ubuntu-ports/ bionic-updates main restricted universe multiverse deb https://mirrors.aliyun.com/ubuntu-ports/ bionic-backports main restricted universe multiverse # deb-src https://mirrors.aliyun.com/ubuntu-ports/s bionic-backports main restricted universe multiverse deb https://mirrors.aliyun.com/ubuntu-ports/ bionic-security main restricted universe multiverse # deb-src https://mirrors.aliyun.com/ubuntu-ports/ bionic-security main restricted universe multiverse deb https://mirrors.aliyun.com/ubuntu-ports/ bionic-proposed main restricted universe multiverse deb-src https://mirrors.aliyun.com/ubuntu-ports/ bionic-proposed main restricted universe multiverse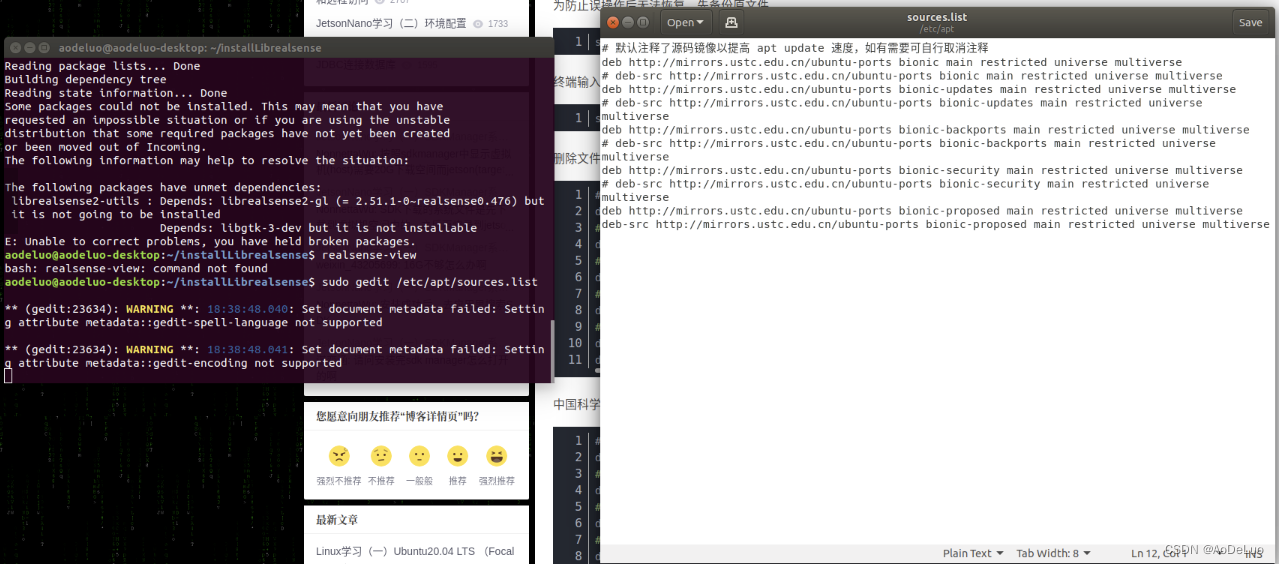
-
更换完镜像源后,使用以下命令进行软件的更新(需要较长的时间进行更新):
sudo apt update sudo apt upgrade -y
二. 编译安装Intel RealSense SDK
-
克隆安装命令库(此github库里的文件是集成了intel realsense安装命令的可执行文件)
git clone https://github.com/jetsonhacksnano/installLibrealsense
-
进入installLibrealsense文件,打开命令行窗口,执行以下代码
./installLibrealsense.sh
-
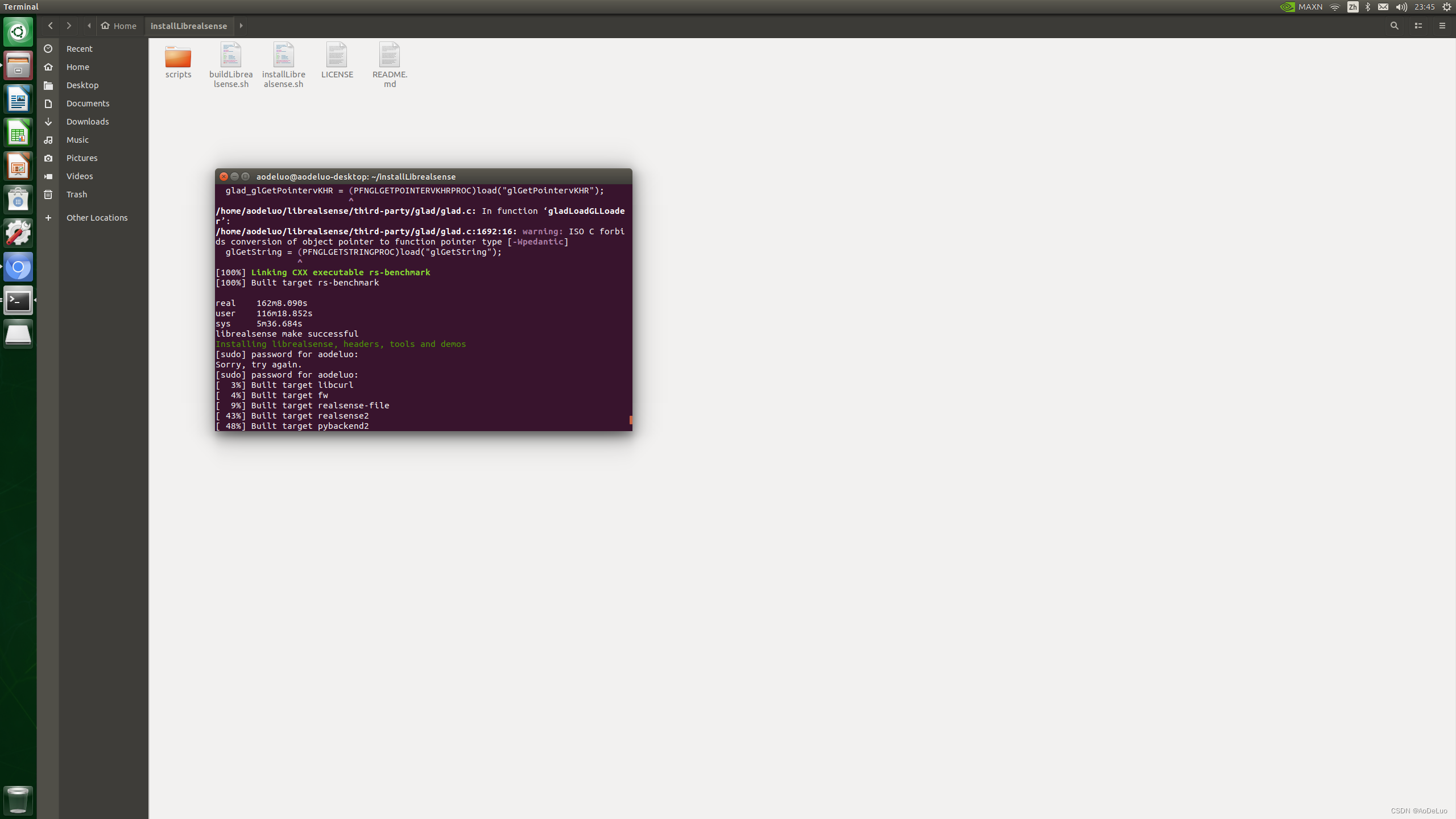
继续进行intel realsense sdk源代码的编译,执行以下代码,会出现提示要求将断开相机与nano的连接,切记一定要拔掉相机后再执行,后续等待编译完成(2~3小时)
./buildLibrealsense.sh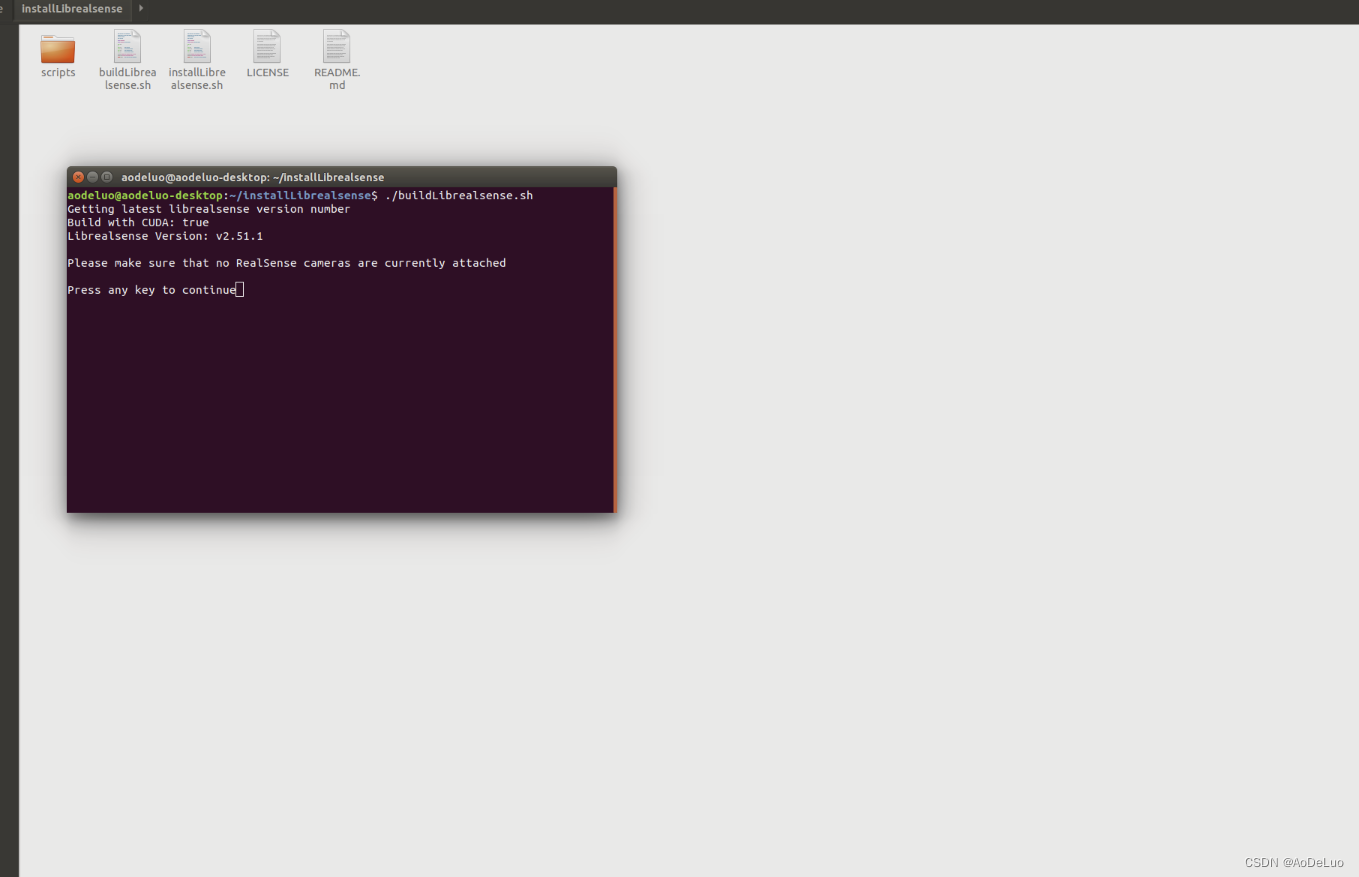
-
运行c++例程与python例程
c++例程使用如下代码:realsense-viewer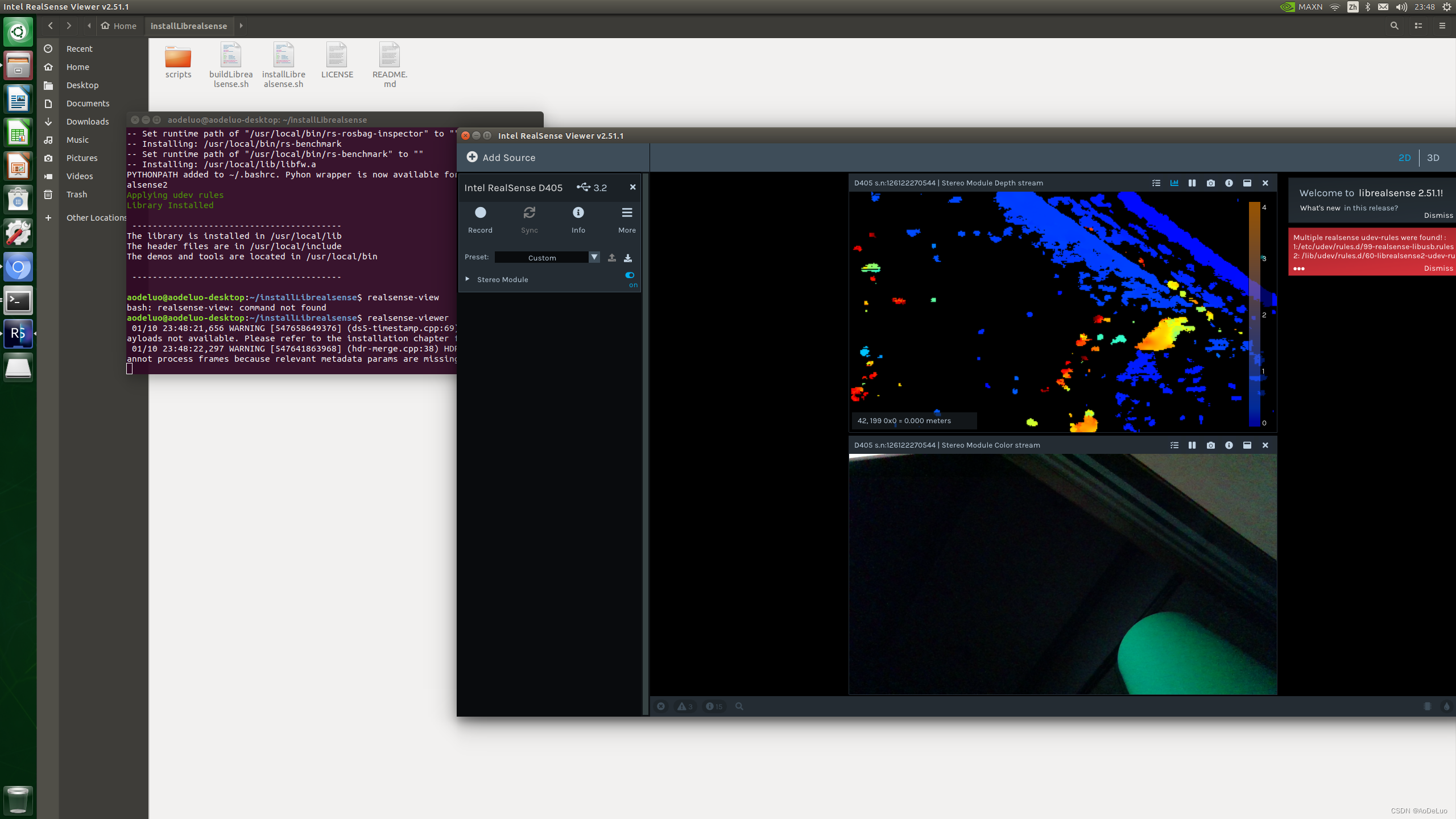
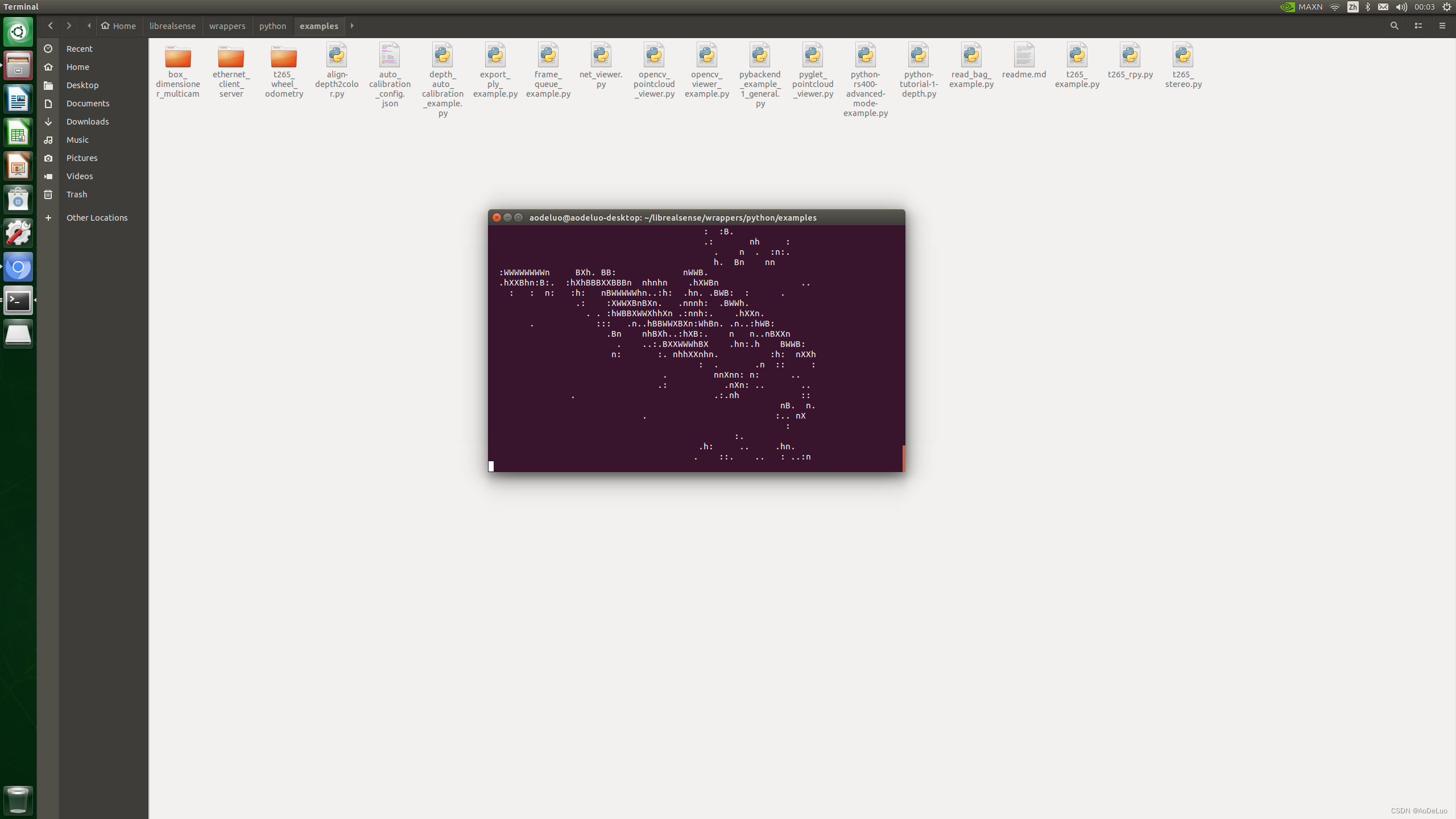
python例程需要进入realsense源代码的python sample目录中,设置好python3,即可运行,运行成功可以看到命令行窗口用文字输出高度轮廓export PYTHONPATH=$PYTHONPATH:/usr/local/lib/python3.6/pyrealsense2 source ~/.bashrc python3 python-tutorial-1-depth.py

















 3785
3785











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











